一种爬壁机器人的清洗端结构的制作方法
本技术涉及爬壁机器人辅助设备,具体为一种爬壁机器人的清洗端结构。
背景技术:
1、爬壁机器人可以在垂直墙壁上攀爬并完成作业的自动化机器人。爬壁机器人又称为壁面移动机器人,因为垂直壁面作业超出人的极限,因此在国外又称为极限作业机器人。爬壁机器人必须具备吸附和移动两个基本功能,而常见吸附方式有负压吸附和永磁吸附两种,永磁吸附方式则有永磁体和电磁铁两种方式,只适用于吸附导磁性壁面。
2、为了完成不同的工作内容,爬壁机器人需要配载不同的工作端,清洗端是其中一种,而现有的清洗端往往构造较为复杂,稳定性不够,并且在使用中不能很好的调整清洗力度。
技术实现思路
1、本实用新型的目的在于提供一种爬壁机器人的清洗端结构,以解决上述背景技术中提出的问题。
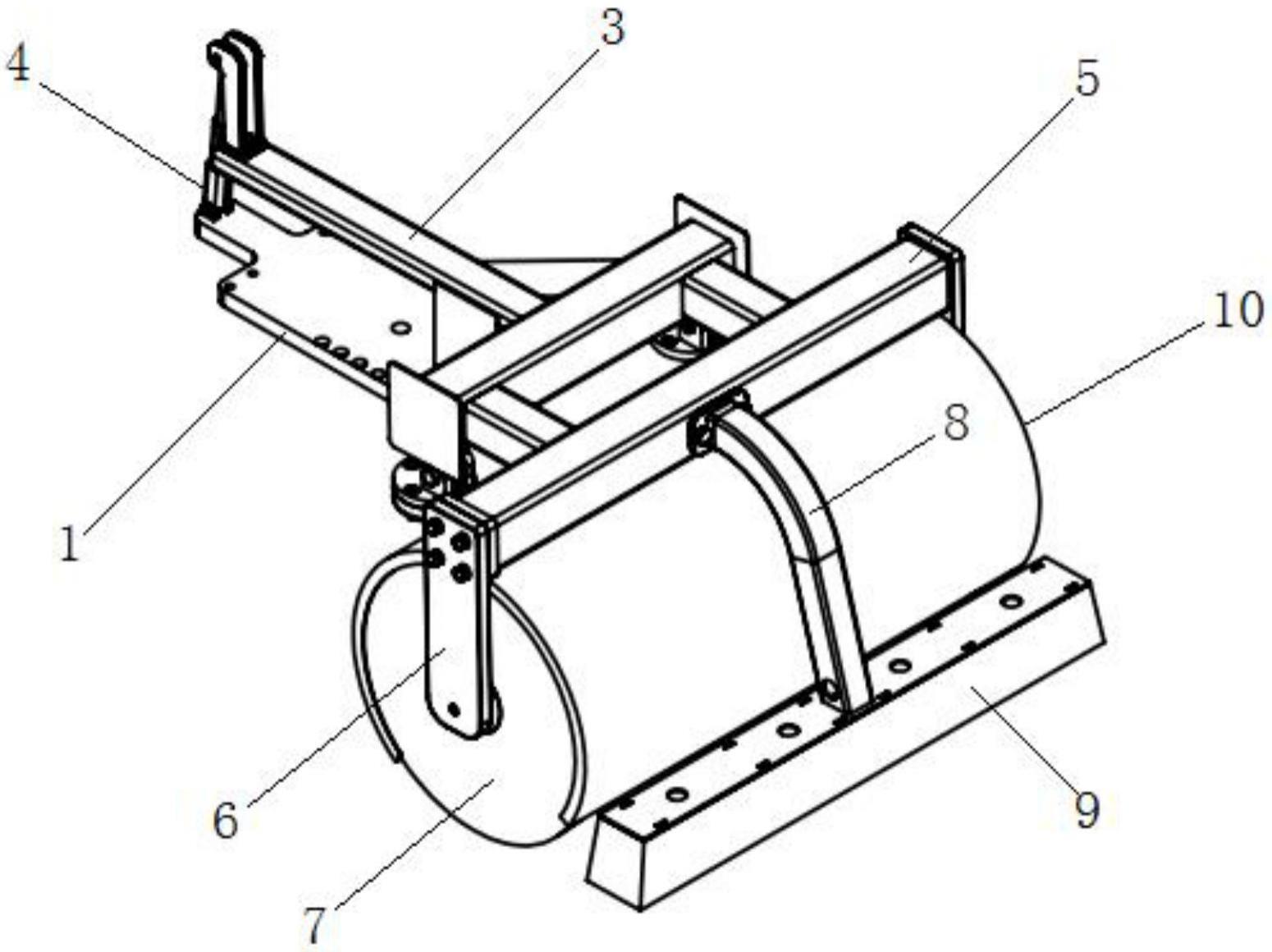
2、为实现上述目的,本实用新型提供如下技术方案:一种爬壁机器人的清洗端结构,包括:安装底座、带座轴承、摆动杆、电推杆、横梁、固定侧板、毛刷滚筒,所述的安装底座为方形板材,安装底座水平固接在爬壁机器人的前端,所述的带座轴承固接在安装底座前端,所述的摆动杆中部通过旋转轴活动连接在带座轴承上,所述的电推杆末端通过销轴座活动连接在安装底座后端,而电推杆的伸缩端通过销轴座活动连接在摆动杆末端,所述的横梁中部垂直固接在摆动杆顶端,横梁水平设置,所述的固定侧板在横梁两侧对称设置,所述的毛刷滚筒两端分别固接在两个固定侧板内端,毛刷滚筒内置旋转电机,而外部均匀设置有毛刷体。
3、进一步的,所述的横梁前侧中间位置设置有连接杆,所述的连接杆末端设置喷雾机构。
4、进一步的,所述的横梁下侧设置有泥瓦罩,所述的泥瓦罩呈圆弧状,泥瓦罩覆盖毛刷滚筒的上侧。
5、与现有技术相比,本实用新型的有益效果是:本实用新型的爬壁机器人的清洗端结构,采用杠杆的原理,在爬壁机器人的前端设置摆动杆,摆动杆后侧设置电推杆,通过电推杆的伸缩来驱动摆动杆进行摆动,从而控制前端清洗端的毛刷滚筒上下改变高度,从而让毛刷滚筒与叶片接触,利用毛刷滚筒的自身的旋转实现清洗;该结构构造简单、稳定性高,并且毛刷滚筒上下升降的高度可调,可改变清洗的力度,满足更多工况的使用需要。
6、本实用新型具有结构简单、安全有效、使用效果好等优点。
技术特征:
1.一种爬壁机器人的清洗端结构,其特征在于,包括:安装底座(1)、带座轴承(2)、摆动杆(3)、电推杆(4)、横梁(5)、固定侧板(6)、毛刷滚筒(7),所述的安装底座(1)为方形板材,安装底座(1)水平固接在爬壁机器人的前端,所述的带座轴承(2)固接在安装底座(1)前端,所述的摆动杆(3)中部通过旋转轴活动连接在带座轴承(2)上,所述的电推杆(4)末端通过销轴座活动连接在安装底座(1)后端,而电推杆(4)的伸缩端通过销轴座活动连接在摆动杆(3)末端,所述的横梁(5)中部垂直固接在摆动杆(3)顶端,横梁(5)水平设置,所述的固定侧板(6)在横梁(5)两侧对称设置,所述的毛刷滚筒(7)两端分别固接在两个固定侧板(6)内端,毛刷滚筒(7)内置旋转电机,而外部均匀设置有毛刷体。
2.根据权利要求1所述的一种爬壁机器人的清洗端结构,其特征在于,所述的横梁(5)前侧中间位置设置有连接杆(8),所述的连接杆(8)末端设置喷雾机构(9)。
3.根据权利要求1所述的一种爬壁机器人的清洗端结构,其特征在于,所述的横梁(5)下侧设置有泥瓦罩(10),所述的泥瓦罩(10)呈圆弧状,泥瓦罩(10)覆盖毛刷滚筒(7)的上侧。
技术总结
本技术公开了一种爬壁机器人的清洗端结构,包括:安装底座、带座轴承、摆动杆、电推杆、横梁、固定侧板、毛刷滚筒,所述的带座轴承固接在安装底座前端,所述的摆动杆中部通过旋转轴活动连接在带座轴承上,所述的电推杆末端通过销轴座活动连接在安装底座后端,而电推杆伸缩端通过销轴座活动连接在摆动杆末端,所述的横梁中部垂直固接在摆动杆顶端,所述的固定侧板在横梁两侧对称设置,所述的毛刷滚筒两端分别固接在两个固定侧板内端,毛刷滚筒内置旋转电机,而外部均匀设置有毛刷体。采用杠杆的原理,通过电推杆的伸缩来驱动摆动杆进行摆动,控制前端清洗端的毛刷滚筒上下改变高度。本技术具有结构简单、安全有效、使用效果好等优点。
技术研发人员:陆勇峰,张萍
受保护的技术使用者:上海小刀智能科技有限公司
技术研发日:20230607
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!