清洁组件及清洁机器人的制作方法
本技术涉及清洁机器人,尤其涉及一种清洁组件及清洁机器人。
背景技术:
1、清洁机器人可以代替人工对特定的表面进行清洗,例如,高楼外墙、玻璃幕墙、光伏板等。清洁机器人在工作表面上行走,并通过清洁组件对工作表面进行清洗。以光伏板清洁机器人为例,清洁机器人在光伏板上行走过程中,清洁组件与光伏板表面接触,对光伏板表面进行刮擦等清洗动作。现有技术中,清洁机器人的清洁组件结构较为笨重,清洁机器人的运动灵活性低,而且不便于搬运清洁机器人。并且在清洗过程中,清洁组件对工作表面产生较大的压力,可能导致工作表面受损。
技术实现思路
1、本实用新型提供一种清洁组件及清洁机器人,用以解决现有技术中清洁组件机构笨重、灵活度低的缺陷,实现简化清洁组件结构、提高灵活性。
2、本实用新型提供一种清洁组件,包括:
3、端板;
4、连接块;
5、多个结构杆,所述结构杆的端部与所述端板和/或所述连接块连接,多个所述结构杆间隔设置,所述结构杆穿设于所述连接块,所述端板、所述结构杆和所述连接块共同限定出安装空间;
6、清洗件,所述清洗件与所述端板连接,所述清洗件的部分位于所述安装空间内,且所述清洗件适于与工作表面接触。
7、根据本实用新型提供的一种清洁组件,所述连接块为多个,且多个所述连接块沿所述结构杆的长度方向间隔分布。
8、根据本实用新型提供的一种清洁组件,所述连接块朝向所述清洗件的一侧表面为弧形面,多个所述结构杆沿所述弧形面间隔分布。
9、根据本实用新型提供的一种清洁组件,所述端板包括主体部和多个连接部,多个所述连接部沿所述主体部的周向成放射状分布,所述清洗件与所述主体部连接,所述结构杆与所述连接部连接。
10、根据本实用新型提供的一种清洁组件,还包括驱动组件,所述驱动组件设于所述连接块上,所述驱动组件与所述清洗件连接,所述驱动组件用于驱动所述清洗件相对所述端板转动。
11、根据本实用新型提供的清洁组件,所述清洗件在其长度方向上分为多段,任意相邻的两段所述清洗件之间均设置所述驱动组件。
12、根据本实用新型提供的一种清洁组件,还包括刮条,所述刮条与所述结构杆连接,所述刮条适于与所述工作表面接触。
13、本实用新型还提供一种清洁机器人,包括:
14、清洁组件,所述清洁组件为如上所述的清洁组件;
15、机身,所述机身与所述清洁组件连接,在所述清洁机器人的前进方向上,至少所述机身的后侧设有所述清洁组件。
16、根据本实用新型提供的清洁机器人,还包括连接臂,所述连接臂与所述机身可转动地连接,所述连接臂端部与所述清洁组件连接。
17、根据本实用新型提供的清洁机器人,所述清洁机器人还包括出水件,在所述清洁机器人的前进方向上,所述出水件位于所述机身的后侧,所述出水件设于所述连接块上且位于所述清洗件的前侧。
18、本实用新型提供的清洁组件,通过端板、结构杆和连接块构成清洁组件的主要框架,简化了清洁组件的结构,并减小了清洁组件的重量,从而便于清洁机器人移动,减小了清洁机器人对工作表面的压力,提高清洁机器人工作过程的安全性。
技术特征:
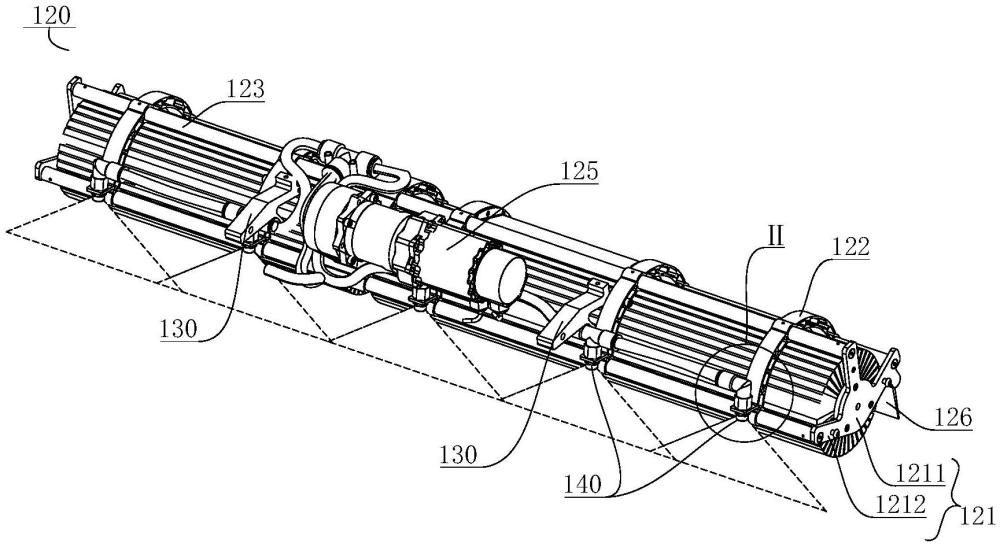
1.一种清洁组件(120),其特征在于,包括:
2.根据权利要求1所述的清洁组件(120),其特征在于,所述连接块(122)为多个,且多个所述连接块(122)沿所述结构杆(123)的长度方向间隔分布。
3.根据权利要求1所述的清洁组件(120),其特征在于,所述连接块(122)朝向所述清洗件(124)的一侧表面为弧形面,多个所述结构杆(123)沿所述弧形面间隔分布。
4.根据权利要求1所述的清洁组件(120),其特征在于,所述端板(121)包括主体部(1211)和多个连接部(1212),多个所述连接部(1212)沿所述主体部(1211)的周向成放射状分布,所述清洗件(124)与所述主体部(1211)连接,所述结构杆(123)与所述连接部(1212)连接。
5.根据权利要求1所述的清洁组件(120),其特征在于,还包括驱动组件(125),所述驱动组件(125)设于所述连接块(122)上,所述驱动组件(125)与所述清洗件(124)连接,所述驱动组件(125)用于驱动所述清洗件(124)相对所述端板(121)转动。
6.根据权利要求5所述的清洁组件(120),其特征在于,所述清洗件(124)在其长度方向上分为多段,任意相邻的两段所述清洗件(124)之间均设置所述驱动组件(125)。
7.根据权利要求1所述的清洁组件(120),其特征在于,还包括刮条(126),所述刮条(126)与所述结构杆(123)连接,所述刮条(126)适于与所述工作表面接触。
8.一种清洁机器人(100),其特征在于,包括:
9.根据权利要求8所述的清洁机器人(100),其特征在于,还包括连接臂(130),所述连接臂(130)与所述机身(110)可转动地连接,所述连接臂(130)端部与所述清洁组件(120)连接。
10.根据权利要求8所述的清洁机器人(100),其特征在于,所述清洁机器人(100)还包括出水件(140),在所述清洁机器人(100)的前进方向上,所述出水件(140)位于所述机身(110)的后侧,所述出水件(140)设于所述连接块(122)上且位于所述清洗件(124)的前侧。
技术总结
本技术涉及清洁机器人技术领域,尤其涉及一种清洁组件及清洁机器人。清洁组件包括端板、连接块、多个结构杆和清洗件。结构杆的端部与端板连接,多个结构杆间隔设置,结构杆穿设于连接块,端板、结构杆和连接块共同限定出安装空间。清洗件与端板和/或连接块连接,清洗件的部分位于安装空间内,且清洗件适于与工作表面接触。通过端板、结构杆和连接块构成清洁组件的主要框架,简化了清洁组件的结构,并减小了清洁组件的重量,从而便于清洁机器人移动,减小了清洁机器人对工作表面的压力,提高清洁机器人工作过程的安全性。
技术研发人员:杨士汉,程勇
受保护的技术使用者:凌度(广东)智能科技发展有限公司
技术研发日:20230811
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!