一种用于清洗网箱的多足机器人的制作方法
本发明属于网箱清洁装备领域,特别涉及一种用于清洗网箱的多足机器人。
背景技术:
1、网箱为水产养殖业的常用工具,网箱多为圆形,包括支撑架和网衣,由于长期浸泡于水中,网衣上会滋生藻类和贝类等,故必须对网衣进行清洗。目前,现有清洗方式一般采用车型水下机器人进行清洗,现有的常规的车型水下清洗机器人设有螺旋桨,螺旋桨提供反作用力,使车型机器人本体压在网衣上,此时车型机器人本体上的毛刷会对网衣进行清洗。车型机器人工作时,如遇上比较大的风浪,机器人便会无法牢固地附着在网衣上,容易导致翻车,且由于该类车型机器人在水下无法利用卫星定位系统自动翻转返回所脱离的位置,导致车型机器人难以复位,会导致清洗网衣不完整。此外,网衣具有一定的弹性,在清洗过程中网衣有时会受力变形,也会改变机器人位置,从而导致常规的车型水下清洗机器人定位不准,清洗不完整。
技术实现思路
1、为克服现有技术的不足及存在的问题,本发明提供一种用于清洗网箱的多足机器人,可稳定地在网箱内行走,从而对网衣进行有效清洗,提升清洗效率。
2、本发明是通过以下技术方案实现的:
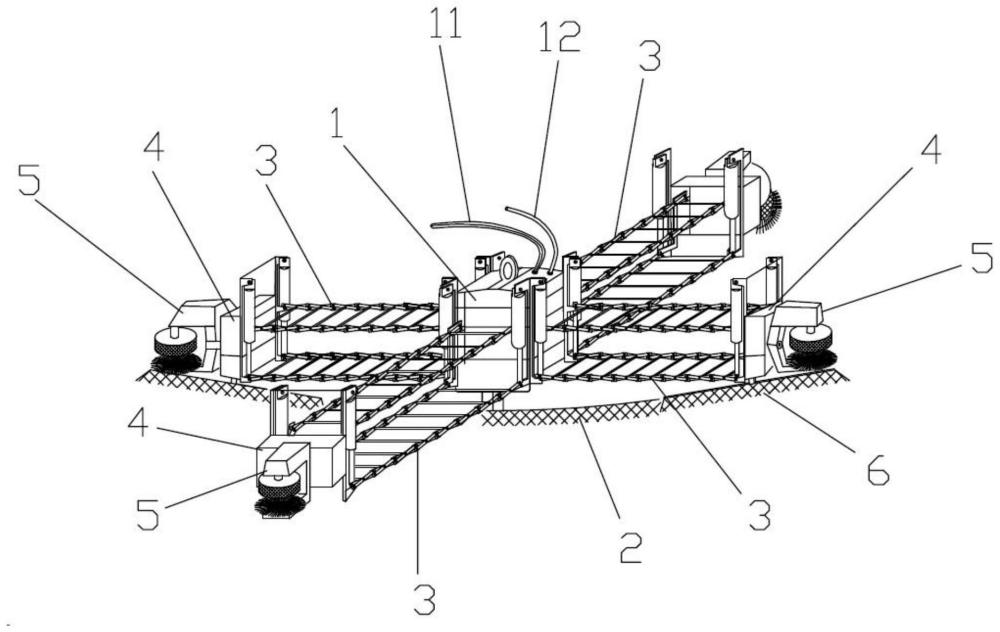
3、一种用于清洗网箱的多足机器人,包括中央核心仓,所述中央核心仓的底部连接有中央清洁装置,中央核心仓连接有多个伸缩臂,且均布于中央核心仓四周,伸缩臂的末端设有转向机构,转向机构连接有行走机构。
4、所述伸缩臂设有四个,且两两相对布置,其中相对布置的两个伸缩臂所连接的转向机构均连接有足部清洁装置。
5、所述伸缩臂为剪叉式伸缩臂,每个伸缩臂均包括呈方形布置的四个剪叉机构,且两两成对设置,每对剪叉机构的两端均设有联动件,联动件连接有驱动液压缸,同一伸缩臂的两对剪叉机构之间设有连接杆。
6、所述行走机构包括与转向机构连接的行走架,行走架上设有行走电机,行走电机连接有行走轮。
7、所述中央核心仓上设有第一清洁电机,中央清洁装置通过第一清洁电机与中央核心仓连接,中央清洁装置上设有毛刷和/或高压水枪喷头。
8、所述足部清洁装置连接有第二清洁电机,足部清洁装置通过第二清洁电机与转向机构连接,足部清洁装置上设有毛刷和/或高压水枪喷头。
9、所述转向机构还连接有圆形清洁头,圆形清洁头上设有毛刷和/或高压水枪喷头。
10、所述转向机构上设有水深传感器和/或水下摄像头。
11、所述中央核心仓连接有用于与工作母船连接的电缆和气管。
12、本发明设置的伸缩臂可伸展,从而带动行走机构支撑于网箱四周的网衣上,因为网箱上的网衣具有弹性,从而使得机器人能有效抵挡水流的冲击,维持机器人工作的稳定性,避免机器人翻车,大大提高工作效率。
技术特征:
1.一种用于清洗网箱的多足机器人,包括中央核心仓(1),其特征在于:所述中央核心仓的底部连接有中央清洁装置(2),中央核心仓连接有多个伸缩臂(3),且均布于中央核心仓四周,伸缩臂的末端设有转向机构(4),转向机构连接有行走机构(5)。
2.根据权利要求1所述的用于清洗网箱的多足机器人,其特征在于:所述伸缩臂(3)设有四个,且两两相对布置,其中相对布置的两个伸缩臂所连接的转向机构(4)均连接有足部清洁装置(6)。
3.根据权利要求2所述的用于清洗网箱的多足机器人,其特征在于:所述伸缩臂(3)为剪叉式伸缩臂,每个伸缩臂均包括呈方形布置的四个剪叉机构(31),且两两成对设置,每对剪叉机构的两端均设有联动件(32),联动件连接有驱动液压缸(33),同一伸缩臂的两对剪叉机构之间设有连接杆(34)。
4.根据权利要求3所述的用于清洗网箱的多足机器人,其特征在于:所述行走机构(5)包括与转向机构连接的行走架(51),行走架上设有行走电机(52),行走电机连接有行走轮(53)。
5.根据权利要求4所述的用于清洗网箱的多足机器人,其特征在于:所述中央核心仓(1)上设有第一清洁电机(21),中央清洁装置(2)通过第一清洁电机与中央核心仓连接,中央清洁装置上设有毛刷和/或高压水枪喷头。
6.根据权利要求5所述的用于清洗网箱的多足机器人,其特征在于:所述足部清洁装置(6)连接有第二清洁电机(61),足部清洁装置通过第二清洁电机与转向机构(4)连接,足部清洁装置上设有毛刷和/或高压水枪喷头。
7.根据权利要求1-6中任一项所述的用于清洗网箱的多足机器人,其特征在于:所述转向机构(4)还连接有圆形清洁头(7),圆形清洁头上设有毛刷和/或高压水枪喷头。
8.根据权利要求7所述的用于清洗网箱的多足机器人,其特征在于:所述转向机构(4)上设有水深传感器和/或水下摄像头。
9.根据权利要求8所述的用于清洗网箱的多足机器人,其特征在于:所述中央核心仓(1)连接有用于与工作母船连接的电缆(11)和气管(12)。
技术总结
本发明公开了一种用于清洗网箱的多足机器人,包括中央核心仓,所述中央核心仓的底部连接有中央清洁装置,中央核心仓连接有多个伸缩臂,且均布于中央核心仓四周,伸缩臂的末端设有转向机构,转向机构连接有行走机构。本发明设置的伸缩臂可伸展,使行走机构可以支撑于网箱四周的网衣上,机器人便能有效抵挡水流的冲击,维持工作的稳定性,避免机器人翻车,大大提高工作效率。
技术研发人员:屈艳芬,潘昱衡,卢绮莹
受保护的技术使用者:中暨生态科技发展(广州)有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!