一种具有清理功能的水下管道巡检机械人及其工作方法与流程
本发明涉及巡检机械人,具体为一种具有清理功能的水下管道巡检机械人及其工作方法。
背景技术:
1、随着生活水平的不断发展及城市用水量不断地增加,水下管道网已经成为了城市管道网络的重要组成部分。水下管道网是一种体系网络。若某处出现问题或者损坏就会造成连锁反应从而影响整个城市的水质。造成不可估量的损失。由于管道网位于水下,不可预测的因素太多,因此,需要一种机器人定期的对水下管道网进行检查评估疏通。
2、现有的水下管道巡检机械人在清理时,清洁头容易逐渐变脏,并沾染清理杂物,从而容易影响后续清理效果,需要将机械人移出管道,再更换清洁头,导致清理效率受到影响,为此,我们提供一种具有清理功能的水下管道巡检机械人及其工作方法。
技术实现思路
1、本发明的目的在于提供一种具有清理功能的水下管道巡检机械人及其工作方法,以解决上述背景技术中提出的现有的水下管道巡检机械人在清理时,清洁头容易逐渐变脏,并沾染清理杂物,从而容易影响后续清理效果,需要将机械人移出管道,再更换清洁头,导致清理效率受到影响的问题。
2、为实现上述目的,本发明提供如下技术方案:一种具有清理功能的水下管道巡检机械人,包括车体,所述车体两侧的外壁上均通过螺丝安装有丝杠直线模组;
3、还包括:
4、清洁组件,其安装在所述丝杠直线模组的上方,所述清洁组件包括第一电动转台,所述第一电动转台的上方通过螺丝安装有第一翻转架,所述第一翻转架的侧壁上安装有第一电机,所述第一电机的输出端设置有第一转轴,所述第一转轴的外壁上安装有第一电动伸缩杆,所述第一电动伸缩杆的伸缩端安装有第二翻转架,所述第二翻转架的侧壁上安装有第二电机,所述第二电机的输出端设置有第二转轴,所述第二转轴的外壁上安装有第二电动伸缩杆,所述第二电动伸缩杆的伸缩端安装有电磁铁装配块。
5、优选的,所述车体的上表面通过螺丝安装有换头备份箱,所述换头备份箱两侧的外壁上均设置有多个横向排列的换头口,所述换头口的内部设置有备份头,所述备份头的外壁上设置有装配槽,且装配槽与电磁铁装配块磁吸组合。
6、优选的,所述备份头的两侧均设置有支架,且支架通过螺丝安装在换头备份箱的内壁上,所述支架的侧壁上设置有卡槽,所述备份头两侧的外壁上均设有卡块,且卡块与卡槽卡合。
7、优选的,所述换头备份箱后端面的外壁上安装有控制器,所述控制器包括无线传输模块与gps定位模块,且控制器通过无线传输模块与用户终端无线连接。
8、优选的,所述丝杠直线模组包括滚珠丝杠与丝杠电机,且丝杠电机的控制端与控制器的输出端电性连接,所述滚珠丝杠的外壁上设置有丝杠滑块,且丝杠滑块与清洁组件的底部组合安装。
9、优选的,所述换头备份箱的前端安装有第二电动转台,所述第二电动转台的上表面安装有第三电动伸缩杆,所述第三电动伸缩杆的伸缩端安装有第三翻转架。
10、优选的,所述第三翻转架的侧壁上安装有第三电机,所述第三电机的输出端设置有第三转轴,所述第三转轴的外壁上安装有摄像头,且摄像头的输出端与控制器的输入端无线连接。
11、优选的,所述装配槽与卡槽的内部均安装有压力感应片,且压力感应片的输出端与控制器的输入端电性连接。
12、优选的,所述车体的前端安装有照明灯具,所述车体后端面的外壁上安装有绕线架。
13、优选的,一种具有清理功能的水下管道巡检机械人的工作方法,包括以下步骤:
14、步骤一:丝杠电机与滚珠丝杠带动丝杠滑块进行移动,将上方的清洁组件移动至所需换头口的位置处,第一电动转台带动第一翻转架处转向至换头备份箱一侧,第一电机带动第一转轴进行转动,使第一电动伸缩杆翻转朝上,开启第一电动伸缩杆,使第一电动伸缩杆向上伸展,将第二翻转架向上顶起至换头口高度下;
15、步骤二:第二电机带动第二转轴进行转动,将第二电动伸缩杆翻转横置,使其朝向换头备份箱的换头口,开启第二电动伸缩杆,第二电动伸缩杆带动电磁铁装配块伸展,使电磁铁装配块插入至备份头的装配槽内进行磁吸组合,第二电动伸缩杆向外回缩,带动该备份头的卡块脱离卡槽,将备份头移出至换头口;
16、步骤三:第二电机带动第二转轴将取出的备份头翻转朝向外侧,第一电动伸缩杆与第二电动伸缩杆分别调节第二翻转架与备份头的位置,丝杠直线模组带动备份头进行横向移动,通过移动备份头对管道内的杂质进行擦拭清理,并在擦拭中,通过第一电机与第二电机调节相应的擦拭清理角度;
17、步骤四:清理后,通过丝杠直线模组带动清洁组件移回之前使用的换头口,第二电动伸缩杆带动备份头插入至换头口,使其卡块插入至卡槽内,电磁铁装配块断电消磁,第二电动伸缩杆向外回缩,将电磁铁装配块与备份头的装配槽分离,再通过丝杠直线模组带动清洁组件移动至另一个换头口处进行更换操作。
18、与现有技术相比,本发明的有益效果是:
19、1、本发明通过丝杠直线模组、清洁组件、换头备份箱的设置,能够使该水下管道巡检机械人具备清理功能,并且,能够具备更换清理头的功能,使该水下管道巡检机械人能够更加长时间在水下管道内进行清理作业,且清理效果更好,无需频繁移出管道进行更换清理操作,从而能够有效提高清理巡检效率,方便用户使用;
20、具体的,第一电机、第二电机用于带动相应翻转架处进行翻转,通过翻转调节头部角度,不但能够方便进行换头操作,还能够在清理过程中使头部更加的灵活;丝杠直线模组用于清洁组件的位置,并通过移动的方式进行清洁擦拭操作;第一电动转台用于调节整个清洁组件处的朝向;换头备份箱用于收纳存放所需的备份头;
21、通过上述结构,解决了现有的水下管道巡检机械人在清理时,清洁头容易逐渐变脏,并沾染清理杂物,从而容易影响后续清理效果,需要将机械人移出管道,再更换清洁头,导致清理效率受到影响的问题。
22、2、第二电动转台用于带动上方组件进行转动,通过转动调节摄像头的摄像监控位置,使其能够更加灵活的对周围管道内环境进行监控,第三电动伸缩杆用于带动第二翻转架处进行升降移动,通过升降调节摄像头的拍摄高度;第三电机用于带动第三转轴进行转动,通过转动调节摄像头的角度,从而能够使摄像头使用更加的灵活,提高监控效果。
技术特征:
1.一种具有清理功能的水下管道巡检机械人,包括车体(1),所述车体(1)两侧的外壁上均通过螺丝安装有丝杠直线模组(2);
2.根据权利要求2所述的一种具有清理功能的水下管道巡检机械人,其特征在于:所述备份头(8)的两侧均设置有支架(11),且支架(11)通过螺丝安装在换头备份箱(4)的内壁上,所述支架(11)的侧壁上设置有卡槽(13),所述备份头(8)两侧的外壁上均设有卡块(12),且卡块(12)与卡槽(13)卡合。
3.根据权利要求3所述的一种具有清理功能的水下管道巡检机械人,其特征在于:所述换头备份箱(4)后端面的外壁上安装有控制器(14),所述控制器(14)包括无线传输模块(32)与gps定位模块(35),且控制器(14)通过无线传输模块(32)与用户终端无线连接。
4.根据权利要求4所述的一种具有清理功能的水下管道巡检机械人,其特征在于:所述丝杠直线模组(2)包括滚珠丝杠(5)与丝杠电机(6),且丝杠电机(6)的控制端与控制器(14)的输出端电性连接,所述滚珠丝杠(5)的外壁上设置有丝杠滑块(7),且丝杠滑块(7)与清洁组件(3)的底部组合安装。
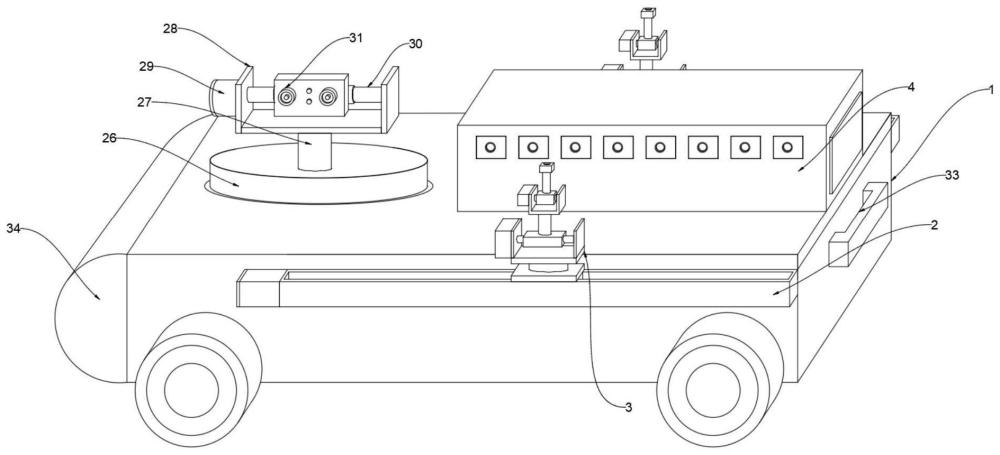
5.根据权利要求5所述的一种具有清理功能的水下管道巡检机械人,其特征在于:所述换头备份箱(4)的前端安装有第二电动转台(26),所述第二电动转台(26)的上表面安装有第三电动伸缩杆(27),所述第三电动伸缩杆(27)的伸缩端安装有第三翻转架(28)。
6.根据权利要求6所述的一种具有清理功能的水下管道巡检机械人,其特征在于:所述第三翻转架(28)的侧壁上安装有第三电机(29),所述第三电机(29)的输出端设置有第三转轴(30),所述第三转轴(30)的外壁上安装有摄像头(31),且摄像头(31)的输出端与控制器(14)的输入端无线连接。
7.根据权利要求7所述的一种具有清理功能的水下管道巡检机械人,其特征在于:所述装配槽(9)与卡槽(13)的内部均安装有压力感应片(10),且压力感应片(10)的输出端与控制器(14)的输入端电性连接。
8.根据权利要求8所述的一种具有清理功能的水下管道巡检机械人,其特征在于:所述车体(1)的前端安装有照明灯具(34),所述车体(1)后端面的外壁上安装有绕线架(33)。
9.一种具有清理功能的水下管道巡检机械人的工作方法,基于权利要求9所述的一种具有清理功能的水下管道巡检机械人实现,其特征在于,包括以下步骤:
技术总结
本发明公开了一种具有清理功能的水下管道巡检机械人及其工作方法,涉及巡检机械人技术领域,为解决现有的水下管道巡检机械人在清理时,清洁头容易逐渐变脏,并沾染清理杂物,从而容易影响后续清理效果,需要将机械人移出管道,再更换清洁头,导致清理效率受到影响的问题。包括车体,所述车体两侧的外壁上均通过螺丝安装有丝杠直线模组;还包括:清洁组件,其安装在所述丝杠直线模组的上方,所述清洁组件包括第一电动转台,所述第一电动转台的上方通过螺丝安装有第一翻转架,所述第一翻转架的侧壁上安装有第一电机,所述第一电机的输出端设置有第一转轴,所述第一转轴的外壁上安装有第一电动伸缩杆。
技术研发人员:游哲轩,刘贤童,廖志敏,郑泽森,罗汤成
受保护的技术使用者:厦门市海沧区职业中专学校
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!