一种实时补偿点胶高度的工艺及方法与流程
[0001]
本发明属于点胶领域,尤其涉及一种实时补偿点胶高度的工艺及方法。
背景技术:
[0002]
随着科技的发展,点胶设备需要持续迭代,不断提升效率和精度,以满足各行业对点胶工艺越来越高的要求。点胶高度是影响点胶品质的重要因素,提高点胶高度的运行精度和稳定性是提升点胶工艺能力的有效途径之一。
[0003]
点胶过程中点胶高度是基于激光探测的高度补偿得出,通常的工作过程是:激光传感器在指定产品位置探测出高度 —>对点胶高度进行补偿 —>执行点胶。此工作方式的特点是探高位置固定,补偿高度后,点胶完全按照固定的高度值进行,现有如下几个问题:1)如果点胶过程中产品实际高度出现变化(比如夹具松动,产品放置倾斜,产品变形、翘起等因素),无法进行实时补偿,会导致点胶头刮碰,点胶缺陷等问题;2)探高和点胶动作分开执行,增加了点胶周期时间,对于z轴方向为非标准圆弧的空间曲线的点胶路径,通常在编程过程中需要很多个弧度、直线等指令相互配合;编程效率较低、难度大、易出错,且点胶高度一致性不好。因此如果能基于产品实际高度变化实现对点胶高度的实时补偿,那么对提升点胶工艺能力将很有意义。
技术实现要素:
[0004]
本发明提供一种实时胶线检测方法,解决的上述问题。
[0005]
为解决上述问题,本发明提供的技术方案如下:一种实时补偿点胶高度的工艺及方法,设有能实现x、y、z轴移动的移料机构,在z轴的活动端上的前侧安装有相机,z轴的活动端的中端设有r轴电机,在z轴的活动端的后侧安装有点胶阀;r轴电机的工作端上安装激光传感器;所述r轴电机围绕z轴旋转;一种实时补偿点胶高度的工艺包括如下步骤:a:产品传输至需要点胶的工位上;b:移料机构上的相机对产品的进行图像采集,并进行视觉编程,生成被采集部分产品的视觉路径,并传输给运动控制模块;c:移料机构上的激光传感器对视觉路径上的产品高度进行探测;d:将探测高度的信息传输给运动控制模块,运动控制模块通过调整移料机构的z轴运动,实时调整点胶高度;e:运动控制模块通过控制移料机构和点胶阀的出胶量,实现对视觉路径上的产品进行点胶。
[0006]
优选的技术方案,b1步骤:执行b步骤之后,根据视觉路径和点胶标定值,可生成点胶路径;点胶阀与相机两者的相对位置为点胶标定值。
[0007]
优选的技术方案,当根据视觉路径和激光标定值,可生成扫描路径;相机与激光传感器的相对位置即激光标定值。
[0008]
优选的技术方案,执行e步骤时,激光传感器先于点胶阀对点胶路径上的进行扫描探高。
[0009]
优选的技术方案,当执行c步骤时,如果激光传感器在扫描过程中没有发现点胶路径的表面存在高度差时,运动控制模块接收到激光传感器的信息时,则执行前一个点胶动作的编码。
[0010]
优选的技术方案,当执行c步骤时,如果激光传感器在扫描过程中发现点胶路径的表面存在高度差时,激光传感器将信号反馈给运动控制模块,运动控制模块控制r轴电机联动,实现激光传感器的激光光点对需要点胶路径的实时跟随。
[0011]
优选的技术方案,运动控制模块控制r轴电机联动是基于标定r轴电机的旋转中心,不影响点胶阀的运动轨迹。
[0012]
优选的技术方案,如果激光传感器在扫描过程中发现点胶路径的表面存在高度差时,运动控制模块接收激光传感器的探测信号时,结合探高标定值进行补偿计算,生成点胶高度。
[0013]
优选的技术方案,探高标定值是点胶头和激光的相对位置。
[0014]
优选的技术方案,运动控制模块对点胶阀实时调整,实现点胶过程中点胶高度的实时补偿。
[0015]
相对于现有技术的有益效果是,采用上述方案,本发明通过激光传感器对点胶路径实时探高,实时引导并控制点胶头在z轴方向精确定位,1. 实现点胶头在z轴方向对产品表面的实时跟随,避免因产品高度变化导致的点胶头刮碰和点胶缺陷等风险,而且探高和点胶同时进行,缩短点胶周期;2. 对于非标准圆弧的 空间曲线的点胶路径,通过实时探高的方式进行点胶可简化编程过程,提升效率和点胶高度的一致性。
附图说明
[0016]
为了更清楚的说明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需使用的附图作简单介绍,显而易见的,下面描述中的附图仅仅是发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0017]
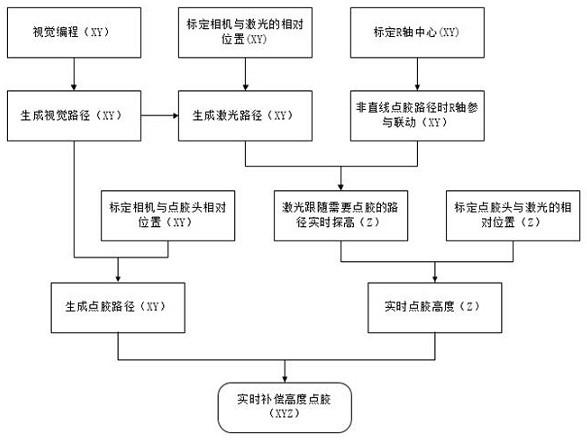
图1为不使用实时探高补偿时点胶路径的教导方式示意图;图2为使用实时探高补偿时点胶路径的教导方式示意图;图3为实时高度补偿系统结构示意图;图4为实时高度补偿系统逻辑图解。
具体实施方式
[0018]
为了便于理解本发明,下面结合附图和具体实施例,对本发明进行更详细的说明。附图中给出了本发明的较佳的实施例。但是,本发明可以以许多不同的形式来实现,并不限于本说明书所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。
[0019]
需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上
或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本说明书所使用的术语“固定”、“一体成型”、“左”、“右”以及类似的表述只是为了说明的目的,在图中,结构相似的单元是用以相同标号标示。
[0020]
除非另有定义,本说明书所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本说明书中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是用于限制本发明。
[0021]
如图1-4所示,本发明的移料机构包括放置产品的放置台、机架台;在机架台上设有在x轴方向移动的x移动组件、y轴方向移动的y移动组件和z轴方向移动的z移动组件;y移动组件安装在x移动组件的活动端,z移动组件安装在y移动组件的活动端处;在z轴的活动端上的前侧安装有相机,z轴的活动端的中端设有r轴电机,在z轴的活动端的后侧安装有点胶阀;r轴电机的工作端上安装激光传感器;所述r轴电机围绕z轴旋转;以下部件相应的功能:激光传感器连续探测点胶路径高度,并将信号反馈给运动控制模块;运动控制模块1. 接收激光传感器的探测信号,进行补偿计算,实时调整点胶高度2. 实时控制r轴运动,确保在点胶过程中,激光光点实时跟随需要点胶的路径;相机1. 视觉编程2. 标定点胶头和激光传感器的相对位置3. 标定r轴的旋转中心4. 标定相机和激光传感器的相对位置5. 标定相机和点胶头的相对位置工控机:集成各控制模块和操作软件。
[0022]
一种实时补偿点胶高度的工艺包括如下步骤:a:产品传输至需要点胶的工位上;b:移料机构上的相机对产品的进行图像采集,并进行视觉编程,生成被采集部分产品的视觉路径,并传输给运动控制模块;c:移料机构上的激光传感器对视觉路径上的产品高度进行探测;d:将探测高度的信息传输给运动控制模块,运动控制模块通过调整移料机构的z轴运动,实时调整点胶高度;e:运动控制模块通过控制移料机构和点胶阀的出胶量,实现对视觉路径上的产品进行点胶。
[0023]
优选的技术方案,b1步骤:执行b步骤之后,根据视觉路径和点胶标定值,可生成点胶路径;点胶阀与相机两者的相对位置为点胶标定值。
[0024]
优选的技术方案,当根据视觉路径和激光标定值,可生成扫描路径;相机与激光传感器的相对位置即激光标定值。
[0025]
优选的技术方案,执行e步骤时,激光传感器先于点胶阀对点胶路径上的进行扫描
探高。
[0026]
优选的技术方案,当执行c步骤时,如果激光传感器在扫描过程中没有发现点胶路径的表面存在高度差时,运动控制模块接收到激光传感器的信息时,则执行前一个点胶动作的编码。
[0027]
优选的技术方案,当执行c步骤时,如果激光传感器在扫描过程中发现点胶路径的表面存在高度差时,激光传感器将信号反馈给运动控制模块,运动控制模块控制r轴电机联动,实现激光传感器的激光光点对需要点胶路径的实时跟随。
[0028]
优选的技术方案,运动控制模块控制r轴电机联动是基于标定r轴电机的旋转中心,不影响点胶阀的运动轨迹。
[0029]
优选的技术方案,如果激光传感器在扫描过程中发现点胶路径的表面存在高度差时,运动控制模块接收激光传感器的探测信号时,结合探高标定值进行补偿计算,生成点胶高度。
[0030]
优选的技术方案,探高标定值是点胶头和激光的相对位置。
[0031]
优选的技术方案,运动控制模块对点胶阀实时调整,实现点胶过程中点胶高度的实时补偿。
[0032]
首先在xy平面使用相机进行视觉编程,生成视觉路径,软件会结合标定值(相机和点胶头的相对位置、相机和激光的相对位置)生成点胶头的点胶路径和激光扫描路径(xy平面);执行点胶时,激光先于点胶头对点胶路径扫描探高(对于xy平面的非直线轨迹,运动控制模块会基于标定的r轴旋转中心控制r轴联动,实现激光对需要点胶路径的实时跟随,同时不影响点胶头的运动轨迹),将探高值实时反馈给软件,软件结合标定值(点胶头和激光的相对位置)生成点胶高度并通过运动控制系统对点胶头实时调整,实现点胶过程中点胶高度的实时补偿。
[0033]
本文中移料机构x移动组件、y移动组件和z移动组件中的结构是常规技术手段,例如; 东莞市中川自动化有限公司的三轴机械手xyth764a、xyth760a、xyth653a等结构,以上产品均能在本文案中实现x、y、z轴方向移动的功能。
[0034]
本申请通过激光传感器对点胶路径跟随式扫描探高,实时引导并控制点胶头在z向精确定位;实现点胶头在z向对产品表面的实时跟随,避免因产品高度变化导致的点胶头刮碰和点胶缺陷等风险,而且探高和点胶同时进行,缩短点胶周期;同时对于非标准圆弧的空间曲线的点胶路径,通过实时探高的方式进行点胶编程可简化编程过程,提升效率和点胶高度的一致性。
[0035]
需要说明的是,上述各技术特征继续相互组合,形成未在上面列举的各种实施例,均视为本发明说明书记载的范围;并且,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1