一种农机类车桥喷漆装置
1.本实用新型属于自动喷漆设备技术领域,具体涉及一种农机类车桥喷漆装置。
背景技术:
2.现有的农机类车桥的喷漆,部分依旧采用人工进行喷漆,人工喷漆的工人技术要求比较高,另外喷漆所用雾化后的喷剂对人体有伤害。现有的乘用类车桥自动喷漆一般采用六轴自动机械手对车桥进行自动喷漆,需要自动机械手底座固定,从而需要精密设计自动机械手的布置位置,同时为了适应车桥沿其轴线的长度,需要采用具有较大工作空间的喷涂机器人。
3.而在农业机械设备中,受农业运输工具销售价格和市场的限制,无法照搬大型的汽车自动喷涂流水线。
技术实现要素:
4.本实用新型针对上述技术问题,提供一种农机类车桥喷漆装置,能够实现车桥的自动喷涂,改变喷涂机器人相对于车桥的运动轨迹以选用较小工作空间的喷涂机器人,降低设备成本。
5.本实用新型采用的技术方案如下:一种农机类车桥喷漆装置,包括滑动桁架和喷涂机器人,车桥设置在滑动桁架的一侧,喷涂机器人包括六轴串联机器人和自动喷枪,吊具将车桥悬空吊起,吊具的轴线与滑动桁架带动六轴串联机器人的运动方向相互平行,六轴串联机器人的底部安装在滑动桁架的输出端,自动喷枪安装在六轴串联机器人的输出法兰上。
6.进一步的,六轴串联机器人包括一轴安装筒,一轴安装筒的底部安装在滑动桁架的输出端,滑动桁架带动六轴串联机器人及其上部件运动,一轴电机安装在一轴安装筒的侧面, 一轴传动机构安装在一轴安装筒的内部,二轴连接臂的一端与一轴传动机构的输出端相连,二轴电机和二轴传动机构设置在二轴连接臂的内部,三轴连接臂的一端与二轴连接臂的另一端铰接,三轴电机和三轴传动机构设置在三轴连接臂的内部,四轴连接臂一端与三轴连接臂另一端铰接,四轴电机和四轴传动机构安装在四轴连接臂的内部,五轴连接臂一端与四轴传动机构的输出端相连,五轴电机和五轴传动机构设置在五轴连接臂的内部,六轴连接臂的中部与五轴连接臂另一端铰接,六轴电机和六轴传动机构安装在六轴连接臂的内部,六轴电机经六轴传动机构与输出法兰相连,自动喷枪安装在输出法兰上。
7.进一步的,滑动桁架包括桁架丝杆和丝杆螺母,丝杆支座布置在桁架丝杆的两端,桁架丝杆能够转动地安装在丝杆支座上,丝杆螺母嵌套在丝杆上,旋转电机的输出端与桁架丝杆的一端通过联轴器相连,丝杆螺母与一轴安装筒下部固连。
8.进一步的,还包括导向部,导向部设置在丝杆螺母与一轴安装筒之间,导向部用于对一轴安装筒的移动方向进行导向,导向部包括两个导向滑轨,导向滑轨与桁架丝杆平行设置,连接滑块与单个导向滑轨配合使用,滑动底座与连接滑块固连,丝杆螺母与滑动底座
固连,一轴安装筒下部固定在滑动底座上。
9.进一步的,吊具包括吊具螺纹杆和位于吊具螺纹杆两侧的连接板,连接板固定在横梁上,螺纹杆的两端能够转动地安装在两侧连接板上,滑动调节电机设置在两侧连接板的外侧,滑动调节电机的输出端与螺纹杆的一端相连,滑动调节电机带动螺纹杆绕其轴线转动,螺纹杆沿其轴线方向设有两端旋向相反的螺旋线,两侧吊挂部滑动设置在螺纹杆旋向相反的两段。
10.进一步的,吊挂部包括吊具滑杆,吊具滑块的内部开有内螺纹,吊具滑杆嵌套在螺纹杆上,电动伸缩杆的上端与吊具滑块的下端固连,电动伸缩杆的下端与及挂钩相连,吊链的顶部挂在挂钩上,套筒安装在吊链的底部,套筒与车桥的一端相连。
11.进一步的,滑动桁架的数量和喷涂机器人的数量均为两个,两个滑动桁架沿垂直于车桥轴线的运动方向布置在其两侧,两个喷涂机器人分别安装在两个滑动桁架的输出端。
12.本实用新型的有益效果:(1)采用六轴机器人搭配滑动桁架,扩展了额六轴串联机器人的工作空间,相应地,可以采用运动空间较小的六轴串联机器人,即减少六轴串联机器人的自身尺寸和成本;(2)采用机器人搭载自动喷枪代替人工搭配手动喷枪的组合,提高了喷涂的效率和质量,同时较少涂料的利用率;(3)启动滑动调节电机,调整两侧吊挂部之间的距离,即两侧套筒之间的距离,从而适应多种长度的车桥,当车桥进入喷房后,系统控制柜将工件类型发给喷涂机器人,喷涂机器人调取相应的程序进行喷涂。
附图说明
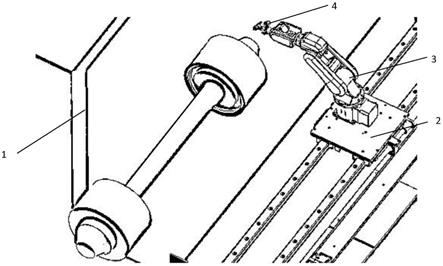
13.图1 为本实用新型装置的局部结构示意图。
14.图2 为本实用新型装置中车桥及其吊具的结构示意图。
15.图3 为本实用新型装置中滑动桁架的结构示意图。
16.图4 为本实用新型装置中喷涂机器人的局部结构示意图。
17.图中:1.喷漆房墙壁;2.滑动桁架;201.滑动底座;202.导向滑轨;203.连接滑块;204.丝杠螺母;205.桁架丝杆;3.喷涂机器人;301.一轴电机;302.一轴安装筒;303.二轴连接臂;304.三轴连接臂;305.四轴连接臂;306.五轴连接臂;307.六轴连接臂;4.自动喷枪;5.吊具;501.吊具滑块;502.螺纹杆;503.滑动调节电机;504.电动伸缩杆;505.挂钩;506.吊链;507.套筒。
具体实施方式
18.如图1
‑
图4所示,一种农机类车桥喷漆装置,包括滑动桁架2和喷涂机器人3,车桥设置在滑动桁架2的一侧,喷涂机器人3包括六轴串联机器人本体和自动喷枪4,吊具5将车桥悬空吊起,吊具5的轴线与滑动桁架2带动六轴串联机器人的运动方向相互平行,六轴串联机器人的底部安装在滑动桁架2的输出端,自动喷枪4安装在六轴串联机器人的输出法兰上。滑动桁架2、喷涂机器人3和吊具5均设置在喷漆房墙壁1围合成的长方体空间内,用于与其他工序的隔开。
19.六轴串联机器人本体包括一轴安装筒302,一轴安装筒302底部与连接基板的上端面固连,连接基板的下端面安装在滑动桁架2的输出端,从而滑动桁架2带动六轴串联机器
人本体及其上部件运动,一轴电机301安装在一轴安装筒302的侧面,一轴传动机构安装在安装筒的内部,二轴连接臂303的一端与一轴传动机构的输出端相连,一轴电机301经一轴传动机构带动二轴连接臂303一端绕安装筒的轴线转动,按照本实施例的布置,即一轴电机301带动二轴连接臂303的一端绕竖直轴线转动,二轴电机和二轴传动机构设置在二轴连接臂303的内部,三轴连接臂304的一端与二轴电机的另一端铰接,二轴电机经二轴传动机构带动三轴连接臂304绕其一端的铰接轴转动,即三轴连接臂304的一端相对于二轴连接臂303的末端转动,三轴电机和三轴传动机构设置在三轴连接臂304的内部,四轴连接臂305一端与三轴连接臂304的另一端铰接,三轴电机经三轴传动机构带动四轴连接臂305绕其一端的铰接轴转动,四轴电机和四轴传动机构安装在四轴连接臂305的内部,五轴连接臂306的一端与四轴传动机构的输出端相连,四轴电机经四轴传动机构带动五轴连接臂306的一端转绕其四轴传动机构的输出端转动,五轴电机和五轴传动机构设置在五轴连接臂306的内部,六轴连接臂307的中部与五轴连接臂306的末端铰接,五轴电机经五轴传动机构带动六轴连接臂307绕五轴连接臂306另一端的铰接轴转动,六轴电机和六轴传动机构安装在六轴连接臂307的内部,六轴电机经传动机构与输出法兰相连并带动输出法兰绕其轴线转动,自动喷枪4安装在输出法兰上。
20.如图2所示,吊具5包括吊具5螺纹杆502和位于吊具5螺纹杆502两侧的连接板,连接板固定在横梁上,横梁为固定基体,螺纹杆502的两端能够转动地安装在两侧连接板上,滑动调节电机503设置在两侧连接板的外侧,滑动调节电机503的输出端与螺纹杆502的一端相连,滑动调节电机503带动螺纹杆502绕其轴线转动,螺纹杆502沿其轴线方向设有两端旋向相反的螺旋线,两侧吊挂部滑动设置在螺纹杆502旋向相反的两段。
21.吊挂部包括吊具5滑杆,吊具滑块501的内部开有内螺纹,吊具5滑杆嵌套在螺纹杆502上,电动伸缩杆504的上端与吊具滑块501的下端固连,电动伸缩杆504的下端与及挂钩505相连,吊链506的顶部挂在挂钩505上,套筒507安装在吊链506的底部。车桥沿其轴线的两端分别与两侧的套筒507相连。
22.启动滑动调节电机503,调整两侧吊挂部之间的距离,即两侧套筒507之间的距离,从而适应多种长度的车桥。
23.如图3所示,滑动桁架2包括桁架丝杆205和丝杆螺母204,丝杆支座布置在桁架丝杆205的两端,桁架丝杆205能够转动地安装在丝杆支座上,丝杆螺母204嵌套在丝杆上,旋转电机的输出端与桁架丝杆205的一端通过联轴器相连,丝杆螺母204与一轴安装筒302下部固连,从而将旋转电机的转动转化为一轴安装筒302及其上部件的移动。为了提高机器人运动的精度,因此在丝杆螺母204与一轴安装筒302之间设置导向部。导向部用于对一轴安装筒302移动进行导向,保证一轴安装筒302沿直线滑动。
24.导向部包括两个导向滑轨202,导向滑轨202与桁架丝杆205平行设置,连接滑块203与单个导向滑轨202配合使用,滑动底座201与连接滑块203固连,丝杆螺母204与滑动底座201固连,一轴安装筒302下部固定在滑动底座201上,设置两个导向滑轨202能够增加对滑动底座201支撑点数量,从而有利于六轴串联机器人运动的稳定性。相应地,每个导向滑轨202上设置两个连接滑块203,滑动底座201下端面的一侧均与两个连接滑块203的上端面固连。
25.为了调高喷漆的效率,将滑动桁架2的数量设置为两个,相应的,喷涂机器人3的数
量设置为两个,两个滑动桁架2沿垂直于车桥轴线的运动方向布置在其两侧,两个喷涂机器人3分别安装在两个滑动桁架2的输出端。
26.工作流程:人工将车桥的两端分别吊具5的两个套筒507固定,人工退出,两个喷涂机器人3在滑动桁架2的带动下沿车桥的中部向其两端方向喷漆,或者从车桥两端方向其中部喷漆,当两个喷涂机器人3相距较近时,一侧的喷涂机器人3先行回位,对整个车桥喷涂完成后,另一侧喷涂机器人3回位,等待人工再次上料。
27.上面结合附图对本实用新型进行了示例性描述,显然本实用新型具体实现并不受上述方式的限制,只要采用了本实用新型的方法构思和技术方案进行的各种非实质性的改进,或未经改进将本实用新型的构思和技术方案直接应用于其它场合的,均在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1