大功率激光器反射镜耦合装置
1.本实用新型涉及激光器技术领域,特别涉及一种大功率激光器反射镜耦合装置。
背景技术:
2.反射镜是大功率激光器中极为重要的光学元件之一,其负责将每个激光器芯片的光反射至同一方向,反射镜的耦合精度直接影响到大功率激光器的质量;现有的大功率激光器的反射镜通常采用人工操作的方式进行耦合,操作人员需要提前给激光器上电,使其发射激光,随后利用器具将反射镜设置在光路上,通过细微的调整使得激光照射向指定角度,在确定好耦合位置后还需要通过胶体令反射镜固定在载体上,整个过程工序繁琐且耗时长,且在整个过程中需要保证反射镜不会被污染,否则极易影响到激光的反射质量,若激光器的功率过高还有可能对操作人员的人身安全造成影响。
技术实现要素:
3.本实用新型提供了一种大功率激光器反射镜耦合装置,其目的是为了解决人工耦合反射镜耗时长、效率低并且具有安全隐患的问题。
4.为了达到上述目的,本实用新型的实施例提供了一种大功率激光器反射镜耦合装置,包括:
5.装置底板,所述装置底板平面设置,所述装置底板上设置有横梁;
6.夹具单元,所述夹具单元设置有夹具运动机构和夹具机构,所述夹具运动机构设置在所述横梁上,所述夹具机构设置在所述夹具运动机构上,所述夹具单元用于夹持并运输反射镜;
7.物料单元,所述物料单元设置有物料运动机构和物料吸盘,所述物料吸盘通过所述物料运动平台安装在所述装置底板上;
8.探针单元,所述探针单元设置有探针运动机构和探针夹持机构,所述探针夹持机构通过所述探针运动机构安装在所述装置底座上,所述探针夹持机构上安装有加电探针;
9.点胶单元,所述点胶单元设置有点胶机构和固化机构。
10.其中,所述夹具运动机构设置有第一运动平台、第二运动平台、第三运动平台、第一旋转运动平台和第二旋转运动平台;所述第二运动平台通过连接件设置在所述第一运动平台的活动板上,所述第三运动平台设置在所述第二运动平台的活动板上,所述第一旋转运动平台设置在所述第三运动平台的活动板上,所述第二旋转运动平台通过平台连接件设置在所述第一旋转运动平台上。
11.其中,所述夹具机构通过一夹具连接件设置在所述第二旋转运动平台的活动板上,所述夹具机构设置有夹持气缸连接件、夹持气缸、吸头连接件和吸头;所述夹持气缸连接件设置在所述夹具连接件上,所述夹持气缸设置在所述夹持气缸连接件的前端底部,所述夹持气缸的输出端两侧分别向下设置有反射镜夹头,所述吸头连接件设置在所述夹具连接件上,所述吸头向下设置在所述吸头连接件的前端,所述吸头设置在两个所述反射镜夹
头之间。
12.其中,所述吸头底部开设有反射镜吸附槽,所述吸头连通负压,所述反射镜吸附槽用于吸附反射镜。
13.其中,所述物料运动机构设置有第一物料运动平台、第二物料运动平台和第三物料运动平台,所述物料吸盘通过吸盘连接件设置在所述第三物料运动平台的活动板上;所述物料吸盘上设置有物料定位块。
14.其中,所述探针单元设置在所述物料单元旁,所述探针运动机构设置有探针进退气缸和探针升降气缸,所述探针夹持机构设置有探针支架和探针固定件,所述探针升降气缸通过探针连接件安装在所述探针进退气缸上,所述探针支架设置在所述探针升降气缸的输出板上,所述加电探针通过所述探针固定件安装在所述探针支架上。
15.其中,所述点胶机构包括三维手动平台、点胶气缸安装座、点胶气缸、胶筒固定件和胶筒,所述三维手动平台固定设置在所述第三运动平台和第一旋转运动平台之间,所述点胶气缸通过所述点胶气缸安装座倾斜设置在所述三维手动平台上,所述胶筒通过所述胶筒固定件设置在所述点胶气缸的输出板上。
16.其中,所述固化机构设置有uv灯支架、uv灯固定件和uv灯,所述uv灯支架设置在所述探针支架侧面,所述uv灯通过所述uv灯固定件安装在所述uv灯支架上。
17.本实用新型的上述方案有如下的有益效果:
18.本实用新型的上述实施例所述的大功率激光器反射镜耦合装置,设置有装置底板、夹具单元、物料单元、探针单元和点胶单元,其中探针单元能够为激光器芯片上电发光,夹具单元会夹取反射镜并将反射镜运输至耦合位置,通过点胶单元点胶并固化将反射镜固定在耦合位置。本实用新型结构设计合理,自动化程度高,能够实现反射镜的自动耦合与安装,有效提高了耦合效率,提升了耦合过程安全性。
附图说明
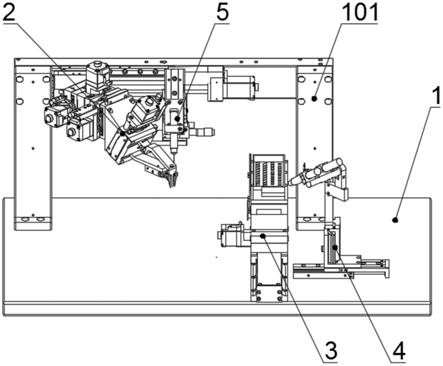
19.图1是本实用新型的大功率激光器反射镜耦合装置的结构示意图;
20.图2是本实用新型的大功率激光器反射镜耦合装置的夹具单元示意图;
21.图3是本实用新型的大功率激光器反射镜耦合装置的夹具单元局部示意图;
22.图4是本实用新型的大功率激光器反射镜耦合装置的物料单元示意图;
23.图5是本实用新型的大功率激光器反射镜耦合装置的探针单元示意图;
24.图6是本实用新型的大功率激光器反射镜耦合装置的点胶单元示意图。
25.【附图标记说明】
[0026]1‑
装置底板;2
‑
夹具单元;3
‑
物料单元;4
‑
探针单元;5
‑
点胶单元;101
‑
横梁;201
‑
第一运动平台;202
‑
第二运动平台;203
‑
第三运动平台;204
‑
第一旋转运动平台;205
‑
第二旋转运动平台;206
‑
连接件;207
‑
平台连接件;208
‑
夹具连接件;209
‑
夹持气缸连接件;210
‑
夹持气缸;211
‑
吸头连接件;212
‑
吸头;213
‑
反射镜夹头;214
‑
反射镜吸附槽;301
‑
物料吸盘;302
‑
第一物料运动平台;303
‑
第二物料运动平台;304
‑
第三物料运动平台;305
‑
吸盘连接件;306
‑
物料定位块;401
‑
加电探针;402
‑
探针进退气缸;403
‑
探针升降气缸;404
‑
探针支架;405
‑
探针固定件;406
‑
探针连接件;501
‑
三维手动平台;502
‑
点胶气缸安装座;503
‑
点胶气缸;504
‑
胶筒固定件;505
‑
胶筒;506
‑
胶筒固定件;507
‑
uv灯支架;508
‑
uv灯固定件;509
‑
uv灯。
具体实施方式
[0027]
为使本实用新型要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
[0028]
本实用新型针对现有的人工耦合反射镜耗时长、效率低并且具有安全隐患问题,提供了一种大功率激光器反射镜耦合装置。
[0029]
如图1至图6所示,本实用新型的实施例提供了一种大功率激光器反射镜耦合装置,包括:装置底板1,所述装置底板1平面设置,所述装置底板1上设置有横梁101;夹具单元2,所述夹具单元2设置有夹具运动机构和夹具机构,所述夹具运动机构设置在所述横梁101上,所述夹具机构设置在所述夹具运动机构上,所述夹具单元用于夹持并运输反射镜;物料单元3,所述物料单元3设置有物料运动机构和物料吸盘301,所述物料吸盘301通过所述物料运动平台安装在所述装置底板1上;探针单元4,所述探针单元4设置有探针运动机构和探针夹持机构,所述探针夹持机构通过所述探针运动机构安装在所述装置底座上,所述探针夹持机构上安装有加电探针401;点胶单元5,所述点胶单元5设置有点胶机构和固化机构。
[0030]
本实用新型上述实施例所述的大功率激光器反射镜耦合装置,设置有所述装置底板1、夹具单元2、物料单元3、探针单元4和点胶单元5,所述物料单元预先通过所述物料吸盘301吸附有激光器基座,其中所述探针运动机构会驱动所述探针夹持机构将所述加电探针401接触至激光器芯片上令激光器芯片发射激光,所述夹具运动机构会驱动所述夹具机构夹持反射镜,并将反射镜运送至耦合处,初步耦合完毕后点胶机构会在耦合位置点上uv胶,所述夹具运动机构会再次驱动所述夹具机构夹持反射镜进行二次耦合,耦合完毕所述固化机构会照射紫外线令所述uv胶固化,从而完成反射镜的安装。
[0031]
如图1和图2所示,所述夹具运动机构设置有第一运动平台201、第二运动平台202、第三运动平台203、第一旋转运动平台204和第二旋转运动平台205;所述第二运动平台202通过连接件206设置在所述第一运动平台201的活动板上,所述第三运动平台203设置在所述第二运动平台202的活动板上,所述第一旋转运动平台204设置在所述第三运动平台203的活动板上,所述第二旋转运动平台205通过平台连接件207设置在所述第一旋转运动平台204上。
[0032]
本实用新型上述实施例所述的大功率激光器反射镜耦合装置,所述夹具机构能够通过所述夹具运动机构上的所述第一运动平台201、第二运动平台202和第三运动平台203实现三向自由运动,还能够通过所述第一旋转运动平台204和第二旋转运动平台205进行旋转运动;当所述夹具机构通过所述夹具运动机构移动至反射镜上方时,所述夹持夹具会将反射镜初步夹住,从而限制反射镜两个方向上的移动,随后所述吸附夹具会将反射镜牢固吸附,吸附完毕后能够将反射镜运输到需要耦合安装的位置。
[0033]
如图2和图3所示,所述夹具机构通过一夹具连接件208设置在所述第二旋转运动平台205的活动板上,所述夹具机构设置有夹持气缸连接件209、夹持气缸210、吸头连接件211和吸头212;所述夹持气缸连接件209设置在所述夹具连接件208上,所述夹持气缸210设置在所述夹持气缸连接件209的前端底部,所述夹持气缸210的输出端两侧分别向下设置有反射镜夹头213,所述吸头连接件211设置在所述夹具连接件208上,所述吸头212向下设置
在所述吸头连接件211的前端,所述吸头212设置在两个所述反射镜夹头213之间。
[0034]
其中,所述吸头213底部开设有反射镜吸附槽214,所述吸头212连通负压,所述反射镜吸附槽214用于吸附反射镜。
[0035]
本实用新型上述实施例所述的大功率激光器反射镜耦合装置,当所述夹持气缸210启动,其输出端的两个所述反射镜夹头213会向内运动,当反射镜位于两个所述反射镜夹头213之间时会被夹持固定,从而完成反射镜两个方向上的定位,随后所述吸附夹具会通过反射镜吸附槽214将反射镜从第三个方向上牢固吸附,吸附完毕后通过所述夹具运动机构将反射镜运输到耦合处
[0036]
如图1和图4所示,所述物料运动机构设置有第一物料运动平台302、第二物料运动平台303和第三物料运动平台304,所述物料吸盘301通过吸盘连接件305设置在所述第三物料运动平台304的活动板上;所述物料吸盘301上设置有物料定位块306。
[0037]
本实用新型上述实施例所述的大功率激光器反射镜耦合装置,所述第一物料运动平台302设置在所述装置底板1上,所述第二物料运动平台303设置在所述第一物料运动平台302的活动板上,所述第三物料运动平台304竖直设置在所述第二物料平台303的活动板上,所述物料吸盘301通过所述吸盘连接件305设置在所述第三物料平台304的活动板上,所述物料吸盘301能够用于吸附激光器基座,所述物料定位块306用于所述激光器基座抵靠定位,从而提升所述激光器基座的安装效率,所述第一物料运动平台302、第二物料运动平台303和第三物料运动平台304能够令所述物料吸盘301带动所述激光器基座自由运动。
[0038]
如图1和图5,所述探针单元4设置在所述物料单元3旁,所述探针运动机构设置有探针进退气缸402和探针升降气缸403,所述探针夹持机构设置有探针支架404和探针固定件405,所述探针升降气缸403通过探针连接件406安装在所述探针进退气缸402上,所述探针支架404设置在所述探针升降气缸403的输出板上,所述加电探针401通过所述探针固定件405安装在所述探针支架404上。
[0039]
本实用新型上述实施例所述的大功率激光器反射镜耦合装置,所述探针进退气缸402和探针升降气缸403能够分别驱动所述探针夹持机构前后以及升降运动,所述探针支架404上通过所述探针固定件405安装有两根所述加电探针401,分别用于对激光器芯片的正负极加电。
[0040]
如图1和图6所示,所述点胶机构包括三维手动平台501、点胶气缸安装座502、点胶气缸503、胶筒固定件504和胶筒505,所述三维手动平台501固定设置在所述第三运动平台203和第一旋转运动平台204之间,所述点胶气缸503通过所述点胶气缸安装座502倾斜设置在所述三维手动平台501上,所述胶筒505通过所述胶筒固定件506设置在所述点胶气缸503的输出板上。
[0041]
本实用新型上述实施例所述的大功率激光器反射镜耦合装置,所述三维手动平台501通过点胶机构安装板设置在所述第三运动平台203和第一旋转运动平台204之间,所述第一运动平台201、第二运动平台202、第三运动平台203能够控制所述点胶机构运动,当所述点胶气缸503启动所述胶筒505会随之前伸,当所述胶筒505移动至耦合处,所述胶筒505的针头会对耦合处点胶。
[0042]
如图5所示,所述固化机构设置有uv灯支架507、uv灯固定件508和uv灯509,所述uv灯支架507设置在所述探针支架404侧面,所述uv灯509通过所述uv灯固定件508安装在所述
uv灯支架507上。
[0043]
本实用新型上述实施例所述的大功率激光器反射镜耦合装置,所述uv灯支架507设置在所述探针支架404侧面,所述固化机构能够随所述探针运动机构运动,所述uv灯509共设置有两支,均通过所述uv灯固定件508安装在所述uv灯支架507上,当反射镜二次耦合完成,两支所述uv灯509能够从两侧对耦合处的胶体照射,从而令反射镜固定在所述激光器基座上。
[0044]
本实用新型上述实施例所述的大功率激光器反射镜耦合装置的工作过程为:所述探针运动机构会驱动所述探针夹持机构将所述加电探针401接触至激光器芯片的电极上,所述激光器芯片会发射激光,所述夹具运动机构会驱动所述夹具机构夹持反射镜,并将反射镜运送至耦合处,初步耦合完毕后点胶机构会随所述第一运动平台201、第二运动平台202、第三运动平台203移动至合适位置,所述胶筒505在耦合位置点上uv胶,点胶完毕所述夹具运动机构会再次驱动所述夹具机构夹持反射镜进行二次耦合,耦合完毕所述固化机构通过所述uv灯509会照射紫外线令所述uv胶固化,从而完成反射镜的安装。本实用新型结构设计合理,自动化程度高,能够实现反射镜的自动耦合与安装,有效提高了耦合效率,提升了耦合过程安全性。
[0045]
以上所述是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1