一种微流控芯片多路流体驱动控制装置的制作方法
1.本发明属于流体驱动技术领域,尤其涉及一种微流控芯片多路流体驱动控制装置。
背景技术:
2.流体聚焦微流控芯片是利用聚焦形态而直接产生连续相包裹离散相的喷雾或液滴。在微流控芯片内进行流体聚焦的研究包括水油两相流和气液两相流两类研究,两类流体聚焦的原理、形式一致,都要在聚焦口形成稳定的泰勒锥。
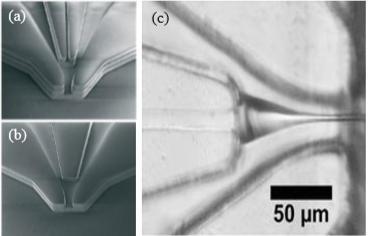
3.2014年,由trebbin、martin等人首次提出气包液的三维流体聚焦微流控芯片,并利用多层套刻的软光刻工艺加工出了上片三层、下片两层的五层结构的pdms芯片。芯片共有左右对称的一对气路流道和一路液路流道,聚焦t型结构的气路与液路呈锐角。芯片上、下片都包含气体流道,上片比下片多出液体流道,上、下片键合起来,形成气、液路高宽深比的三维流体聚焦微流控芯片。在芯片内,液路出口处的液体样品被气体从四周完全包裹,让液体被两边的鞘气挤压形成极细的流束喷出,在芯片内聚焦形成较为稳定的泰勒锥,并在到芯片边缘的区间内形成拉伸流形式,完成对液体的聚焦与喷射,达到性能较好的电喷雾效果。芯片上、下片电镜图及显微镜下聚焦效果如图2所示。
4.单路气包液的三维流体聚焦微流控芯片具有气、液两路流体,若继续增加芯片数量,所需外部的流体驱动数量也将上升,而一套mfcs-ez流体驱动系统只有两路精密气泵输出口,且其成本高、体积大。因此,基于对系统器件小型化和节约成本的考虑,需要一种多路流体驱动控制装置来减少昂贵的精密气泵的数量。
技术实现要素:
5.本发明的发明目的是提供一种微流控芯片多路流体驱动控制装置,其能够通过多路流体驱动控制装置来减少昂贵的精密气泵的数量。
6.为达到上述目的,本发明所采用的技术方案是:
7.一种微流控芯片多路流体驱动控制装置,利用流体驱动系统来给effsi微流控芯片的气路和液路分别提供氮气和甲醇水,流体驱动系统包括气泵控制系统、精密流量计和储液池,精密流量计连接电脑,可以利用配套软件maesflo来控制并监测气压、流速和流量。本发明设计并搭建了多路流体控制器件。器件由分压气动电磁阀及其控制器件组成,利用labview 作为上位机驱动arduino单片机以控制气动电磁阀组,通过分流从而增加多路流体驱动。
8.多路流体控制装置示意图如图1所示,以芯片液路为例,氮气经过a-g六个环节的传输以推动e.储液池内的溶液通过连接管道进入微流控芯片的液路。其中,b.气阀是氮气进入系统的总开关;一套mfcs流体驱动系统中的c.精密泵有两个输出口,利用计算机的maesflo 软件可以控制精密泵两路输出口的通断及输出气压;希望将精密泵的一个输出分为多少个输出口便设置相应个数d.电磁阀组,电磁阀组上连有相应个数的汇流板,由计算
机中的labview 驱动arduino电路来控制电磁阀组的状态,从而控制汇流板的通气孔的通断;e.储液池存有溶液,当储液池的进气管道中有气体进入时,会驱动溶液从出液管道流出;溶液又流经f.mfcs 精密流量计,利用计算机的maesflo软件可以精确、实时地读取液体的流速和流量;最后,溶液流入微流控芯片的液路。多路流体控制器件可以通过组装、拆解达到不同的流体驱动功能。图1中虚线框内的部分即是多路流体的分液和控制器件,去掉该部分后的即是正常的一路液体驱动;去掉e和f部分即是气体驱动。图1示意的以四路输出为例的是利用mcfs精密泵的一个输出口连接四个电磁阀组,将输出氮气一分为四地提供给芯片的四路流体,mcfs精密泵的另外一路输出同样也可通过多路流体控制器件用于驱动多路流体。在芯片内,由于气、液路流阻不同,因此溶液在液路中的流速受气、液路驱动气压共同影响。
附图说明
9.图1是本发明的多路流体控制装置示意图。
10.图2是本发明的气泡液三维流体聚焦微流控芯片图。
11.图3是本发明的精密气泵图。
12.图4是本发明的arduino uno控制器。
13.图5是本发明的v114-5mu-m5电磁阀。
14.图6是本发明的vv100-s41-05-m5汇流板。
15.图7是本发明的单路继电器模块。
16.图8是本发明的单路驱动电路图。
17.图9是本发明的labview前面板图。
18.图10是本发明的流体控制软件图。
19.图11是本发明的微流控芯片流体驱动装置实物图。
20.图12是本发明的单路液路驱动。
21.图13是本发明的2路液路驱动。
22.图14是本发明的4路液路驱动。
具体实施方式
23.下面结合附图,对本发明的具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
24.除非另有其它明确表示,否则在整个说明书和权利要求书中,术语“包括”或其变换如“包含”或“包括有”等等将被理解为包括所陈述的元件或组成部分,而并未排除其它元件或其它组成部分。
25.在本发明的描述中,需要理解的是,术语“中心”、“长度”、“宽度”、“上”、“下”、“竖直”、“水平”、“顶”、“底”、“内”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
26.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相
连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
27.在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
28.如图1所示,一种微流控芯片多路流体驱动控制装置,包括如下步骤:
29.步骤1:多路流体驱动控制装置硬件选型。
30.硬件部分包括arduino单片机和电磁阀组驱动电路设计。arduino单片机通过i/o接口接收由labview界面发出的相关指令,并送至arduino内部产生控制信号,驱动某路电磁阀组改变其工作状态,进而控制汇流板的通气孔的通断。
31.(1)arduino单片机:装置选用arduino uno控制器(如图4所示)作为labview和电磁阀组信号传递的中介,作用主要是为继电器模块供电,并与labview建立通信控制多路电磁阀组通断。
32.(2)电磁阀组选型和驱动电路设计:电磁阀自身结构简单,外形尺寸小,动作快(响应时间在几毫秒至几十毫秒之间),功率小。电磁阀由开关信号控制故其控制系统简单,使用安全,外漏杜绝,内漏易控,种类繁多,应用广泛。装置采用smc公司v114-5mu-m5两位三通型电磁阀,其流体为气体,周围环境和流体的温度范围为-10~50℃,致动响应时间为5ms,制动响应时间为4ms,最大致动频率为20hz,不需要润滑。其工作电压为24v(可允许电压波动-10~10%),消耗功率为0.35w,工作压力范围为0~0.7mpa。v114-5mu-m5两位三通型电磁阀如图5所示。
33.因为要通过分流来增加多路流体驱动,装置使用汇流板来实现一路进气,四路输出的效果,减少精密气泵的使用,根据路数要求汇流板可增加输出口数量。装置采用smc公司 vv100-s41-04-m5汇流板,是针对v114-5mu-m5电磁阀的集成器件,可供2~20个电磁阀集成。vv100-s41-05-m5汇流板如图6所示。
34.arduino输出电压最高为5v,v114-5mu-m5电磁阀供电电压为直流电24v,arduino不能直接用于驱动v114-5mu-m5电磁阀,同时也为避免电磁阀工作时对arduino性能的影响,需要两者之间加一级驱动放大保护电路,这样两者都能稳定可靠工作。
35.单片机和电磁阀之间采用继电器模块,可实现通过输入回路的小电流控制输出回路的大电流,即arduino输出信号可控制电磁阀组的通断。单路继电器模块如图7所示,可根据需要增加继电器模块数量。
36.继电器模块输出回路有三个触点,中间的触点是公共端,其他两个分别为常开和常闭。输入回路不通电时,公共端与常闭触点闭合,与常开触点断开;反之输入回路通电时,公共端与常开触点闭合,与常闭触点断开。在继电器模块与v114-5mu-m5电磁阀的连接中需要在电磁阀两端加入二极管进行电路保护,如图8所示。
37.步骤2:多路流体驱动控制装置软件设计。
38.软件设计包括arduino与labview的通信和labview的界面设计,界面上提供控制器串口及相关参数的输入,方案设计简单、控制精准、性能稳定。
39.(1)arduino与labview的通信
40.labview是ni公司开发的全功能集成开发环境(ide),其编程语言官方称之为g语言。 g语言在代码的构建和保存方法中是唯一的,不基于代码,而是以一种图解的视角来展示数据流动。
41.两者的通信使用了针对arduino控制板的linx工具包,减少控制器的编程工作和单靠按钮或开关元器件进行控制的不确定性,增加了labview数据流可视化和软件前面板简易操作的优点。
42.加载linx工具包后,运行labview时其实并没有和arduino建立通信,这时程序中的 linx串口节点会有错误输出error 5003。在程序运行前需要点击工具栏中的linx firmwarewizard选项,建立两者的通信,选择所用arduino控制板的类型、固件下载方式、连接的com 口、固件更新的方式并进行更新,完成后labview运行便可实现对uno的控制。
43.(2)labview的界面设计
44.根据linx工具包属性设计labview界面,不需要arduino编程,使设计的复杂度整体降低。前面板界面整洁操作简单方便,程序框图设计不需要深度学习labview语言即可完成。前面板如图5、图8所示,可实现四路电磁阀组的驱动,在运行前硬件连接时为各组电磁阀布置arduino的输入/输出接口,并输入labview界面do channels处;运行中想接通某路电磁阀可以点击界面valves处对应的灯,灯亮则电磁阀接通,反之则断开。图9中只显示了四路控制,可相应增加或减少界面valves处和do channels处的数量实现更多路的驱动。
45.步骤3:根据多路流体驱动控制装置具体实施。
46.根据上述装置,仅需要使用labview和maesflo软件就可以灵活快捷地控制输入芯片的流体,并观察记录液体流速。控制软件如图10所示。
47.微流控芯片多路流体驱动控制装置实物如图11所示,图中演示了一路气路和一路液路控制,其中c为mcfs精密泵,d为电磁阀组,e为储液池,f为mcfs精密流量计,g为微流控芯片。
48.图12、13、14分别是多路effsi芯片上纯液路驱动,通过装置控制得到的单路液路驱动, 2路液路同时驱动和4路液路同时驱动效果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1