用于产生声驻波的电子构型和控制的制作方法
用于产生声驻波的电子构型和控制
1.本技术是申请日为2017年4月24日、发明名称为“用于产生声驻波的电子构型和控制”的中国发明专利申请号201780039257.x的分案申请。
2.相关申请的交叉引用
3.本技术要求享受下述申请的优先权:2017年2月21日提交的美国临时专利申请序号62/461,691(p
‑
095)、2017年1月13日提交的美国临时专利申请序号62/446,356(p
‑
094)、和2016年4月24日提交的美国临时专利申请序号62/326,766(p
‑
065)。并且本技术是以下美国专利申请的延续部分:2016年12月12日提交的美国专利申请序号15/371,037,其是2014年11月5日提交的美国专利号9,512,395的延续、并且要求2014年7月2日提交的美国专利申请序号62/020,088以及2013年11月5日提交的美国专利申请序号61/900,395的优先权;2016年10月4日提交的美国专利申请序号15/285,349,其是2015年5月8日提交的美国专利号9,457,302的延续、并且要求美国专利申请序号61/990,168的优先权;以及2013年9月13日提交的美国专利申请序号14/026,413,其是2013年3月15日提交的美国专利申请号13/844,754的延续并且要求2013年1月21日提交的美国专利申请序号61/754,792、2012年10月2日提交的美国专利申请序号61/708,641、2012年3月15日提交的美国专利申请序号61/611,240、和2012年3月15日提交的美国专利申请序号61/611,159的优先权;以及2016年10月3日提交的美国专利申请序号15/284,529,其要求2016年4月14日提交的美国专利申请序号62/322,262、2016年3月12日提交的美国专利申请序号62/307,489、和2015年10月1日提交的美国专利申请序号62/235,614的优先权;以及2014年11月5日提交的美国专利号9,512,395,其要求2014年7月2日提交的美国专利申请序号62/020,088、和2013年11月6日提交的美国专利申请序号61/900,635的优先权。这些申请的全部内容以引用的方式并入本文。
背景技术:
4.声泳是利用例如声驻波的声学器件从初级流体或主流体中分离颗粒和次流体。当密度和/或压缩性存在差异时,也称为声学对比度因数,声驻波可以对流体中的颗粒施加力。驻波中的压力曲线包含在驻波波节处的局部最小压力幅值的区域和在驻波波腹处的局部最大值的区域。根据颗粒的密度和/或压缩性,可以在驻波的波节处或波腹处俘获颗粒。通常,驻波的频率越高,能俘获到的颗粒越小。
5.在微观尺度上,例如具有微米量级的结构尺寸,传统的声泳系统倾向于使用半波长或四分之一波长的声学室,其厚度在几兆赫兹的频率下通常小于一毫米,并且以非常缓慢的流率(例如μl/min)操作。这种系统不具有可扩展性,因为它们受益于极低的雷诺数、层流操作和最小的流体动力学优化。
6.在宏观尺度上,平面声驻波已用于分离过程。然而,单个平面波倾向于俘获颗粒或次流体,使得通过关闭或移除平面驻波来实现与初级流体的分离。平面驻波的移除可能妨碍连续操作。而且,用于产生声平面驻波的功率量倾向于通过废能加热初级流体,这对于被处理的材料可能是不利的。
7.因此,传统的声泳装置由于若干因素而具有有限的功效,这些因素包括发热、使用平面驻波、限制流体流动、以及不能捕获不同类型的材料。
8.对提供给超声换能器的功率的控制实施起来是具有挑战性的,特别是对高效性能的实施具有挑战性。促进谐振腔系统中的多模行为可取决于向系统中的超声换能器提供足够的电力。
技术实现要素:
9.以下呈现简化的发明内容,以便提供对本发明一些方面的基本理解。发明内容不是对本发明的全面概述。它既不旨在指出本发明的关键或重要元素,也不旨在界定本发明的范围。下列发明内容仅以简化形式呈现本发明的一些构思,作为以下描述的开头。
10.本发明的实施例涉及一种用于从主流体分离次流体或颗粒的设备,其包括具有相对的第一壁和第二壁、至少一个入口和至少一个出口的流室。控制电路提供驱动信号,并且定标电路(scaling circuit)接收所述驱动信号并提供等效电流源驱动信号,其中所述定标电路提供关于超声换能器的阻抗和源转换(translation)。具有换能器输入阻抗且位于所述流室内的超声换能器包括至少一个由所述等效电流源驱动信号驱动以在所述流室中产生声驻波的压电元件。至少一个反射器位于所述流室的与所述至少一个超声换能器相对的一侧的第一壁上。
11.所述控制电路可包括电压源。
12.所述声驻波可以包括多维声驻波。所述多维声驻波可以由单个压电元件或多个压电元件产生,以更高阶的模态扰动。
13.所述定标电路可以包括:具有第一端子和第二端子的电感器、以及具有第三端子和第四端子的电容器,其中所述第一端子接收驱动信号,所述第二端子和第三端子连接,所述第四端子连接到参考电位,并且在所述第二端子和第三端子处提供表示所述等效电流源驱动信号的信号。
14.所述定标电路可以由无源电路部件组成。
15.本发明的一些方面还涉及一种用于从主流体分离次流体或颗粒的设备,其包括具有相对的第一壁和第二壁、至少一个入口和至少一个出口的流室。电路被配置为接收驱动信号并提供转换驱动信号。超声换能器位于所述流室内,所述换能器包括至少一个压电元件,其接收所述转换驱动信号以在流室中产生声驻波。至少一个反射器位于所述流室的与所述至少一个超声换能器相对的一侧的壁上。
16.所述声驻波可包括多维声驻波。
17.所述电路可以包括接收所述驱动信号并提供转换驱动信号的定标电路,其中所述定标电路提供关于所述超声换能器的阻抗和源转换。
18.所述定标电路可包括第一电感器、第一电容器和第二电感器,其共操作地布置为低通滤波器。
19.所述定标电路可包括:具有第一端子和第二端子的电感器、以及具有第三端子和第四端子的电容器,其中,所述第一端子接收驱动信号,所述第二端子和第三端子连接,所述第四端子连接到参考电位,并且在所述第二端子和第三端子处提供表示等效转换驱动信号的信号。
20.所述定标电路可由无源电路部件组成。
21.第一分接头(tap)可以感测跨过所述超声换能器的电压。所述换能器可以由压电材料构成或包含压电材料,该压电材料可以实施为陶瓷晶体、多晶体或其它晶体,所有这些在本文都可以统称为晶体。所述第一分接头可以提供表示跨过所述换能器的电压的感测电压信号,并且电流感测线圈可以感测电流并提供表示晶体电流的感测电流信号。
22.控制器可以接收并处理所述感测电流信号和所述感测电压信号,以控制所述驱动信号。
23.所述电路可以包括:具有第一端子和第二端子的第一电感器、具有第三端子和第四端子的第一电容器、以及具有第五端子和第六端子的第二电感器,其中,所述第一端子接收表示驱动信号的信号,所述第二端子连接至所述第三端子和所述第五端子,所述第四端子连接到参考电压,并且在所述第六端子上提供表示电流驱动信号的输出信号。
24.本发明的一些方面还涉及一种用于从主流体分离次流体或颗粒的设备,其包括具有相对的第一壁和第二壁、以及至少一个入口和至少一个出口的流室。驱动电路被配置成提供驱动信号,并且滤波器电路被配置成接收所述驱动信号并提供转换驱动信号。超声换能器与所述流室共操作地布置,所述换能器包括由所述电流驱动信号驱动以在所述流室中产生声驻波的至少一个压电元件中的一个或多个。至少一个反射器位于与所述超声换能器相对的所述第二壁上,以接收所述声驻波。
25.所述声驻波可包括多维声驻波。
26.所述滤波器电路可包括:具有第一端子和第二端子的电感器、以及具有第三端子和第四端子的电容器,其中,所述第一端子接收驱动信号,所述第二端子和第三端子连接,所述第四端子连接到参考电位,并且在所述第二端子和第三端子处提供表示等效电流源驱动信号的信号。
27.所述滤波器电路可包括:具有第一端子和第二端子的第一电感器、具有第三端子和第四端子的第一电容器、以及具有第五端子和第六端子的第二电感器,其中,所述第一端子接收表示所述驱动信号的信号,所述第二端子连接至所述第三端子和第五端子,所述第四端子连接到参考电压,并且在所述第六端子上提供表示电流驱动信号的输出信号。
28.所述滤波器可以由无源电路部件组成。
29.所述电压驱动信号可以基本上是方波,并且所述转换信号可以基本上是正弦波。
附图说明
30.以下是附图的简要描述,附图是出于说明本文公开的示例性实施方案的目的而给出的,而不是为了限制本发明。
31.图1a是说明具有比主流体密集度小的次流体或颗粒的声泳分离器的功能的示意图。
32.图1b是说明具有比主流体更密集的次流体或颗粒的声泳分离器的功能的示意图。
33.图2是传统的超声换能器的剖视图。
34.图3a是可以在本发明中使用的超声换能器结构的剖视图。在换能器内存在气隙,并且不存在背衬层或耐磨板。
35.图3b是可以在本发明中使用的超声换能器结构的剖视图。在换能器内存在气隙,
并且存在背衬层和耐磨板。
36.图4是在超声换能器中使用的传统单件式单片压电晶体。
37.图5是在本发明的换能器中使用的具有16个压电元件的示例性矩形压电阵列。
38.图6是在本发明的换能器中使用的具有25个压电元件的另一示例性矩形压电阵列。
39.图7是示出声辐射力、重力/浮力和斯托克斯阻力(stokes'drag force)与颗粒尺寸的关系的曲线图。横轴以微米(μm)为单位,纵轴以牛顿(n)为单位。
40.图8是在不同频率下驱动的方形换能器的电阻抗幅度与频率的关系图。
41.图9a示出了从垂直于流体流动的方向上的图8的最小幅度中的七个的俘获线路构造。
42.图9b是示出分离器的透视图。显示了流体流动方向和俘获线路。
43.图9c是从流体入口沿着图9b的流体流动方向(箭头114)的视图,其示出了驻波的将捕获颗粒之处的俘获波节。
44.图9d是沿着图9b中所示箭头116在俘获线路构造下通过换能器面的视图。
45.图10a示出了用于分离浮动材料的声泳分离器。
46.图10b是在异型管嘴壁129和收集管道137的交叉点附近的流体流动的放大视图。
47.图11a示出在生物制药应用中所使用的声泳分离器的分解图。
48.图11b示出了具有两个声学室的叠置式声泳分离器的分解图。
49.图12a是示出关于一个试验使用贝克曼库尔特细胞活力分析仪(beckman coulter cell viability analyzer)从介质中去除细胞的效率曲线。
50.图12b是示出关于另一试验使用贝克曼库尔特细胞活力分析仪从介质中去除细胞的效率曲线。
51.图13示出了为超声换能器和换能器阵列的模拟而开发的二维数值模型的示意图。
52.图14a至图14d是将图13的数值模型(底部)的结果与公布数据(上部)比较的示意图,表明了数值模型的准确性。图14a比较了声学位势u。图14b比较声辐射力(arf)的x分量。图14c比较arf的y分量。图14d比较了arf的绝对值。
53.图15为示出由图13的模型中的单片压电晶体产生的声驻波的幅度的示意图。频率为2.245mhz。
54.横轴是沿x轴的位置,且纵轴是在换能器和反射器之间沿y轴的位置。
55.图16为示出由图13的模型中的4元件压电阵列产生的声驻波的幅度的图。频率为2.245mhz,各元件之间的相位发生变化。
56.图17为示出由图13的模型中的5元件压电阵列产生的声驻波的幅度的图。频率为2.245mhz,各元件之间的相位发生变化。
57.图18为具有如图5所示的由具有在晶体中制成的切口的2mhz pzt
‑
8晶体制成的4
×
4压电阵列的声泳装置的图片。
58.图19是将异相压电阵列的模拟与使用异相阵列的实际声泳试验进行的比较。对于该模拟,异相指的是输送电压的相位角。对于异相测试,数值模型的相位从0
°‑
180
°‑0°‑
180
°
变化。对于试验测试,元件以棋盘图案变化。
59.图20是将同相压电阵列的模拟与使用同相阵列的实际声泳试验进行的比较。对于
该模拟,同相指的是输送电压的相位角。对于同相测试,相位在所有元件之间保持恒定。
60.图21是表明切口晶体(顶部)与换能器阵列的图片,该换能器阵列具有通过灌封材料结合在一起的压电元件(底部)。
61.图22是示出针对4元件阵列进行测试的异相模式的示意图。
62.图23是示出针对5元件阵列进行测试的异相模式的示意图。
63.图24是示出来自单片压电晶体模拟的归一化声辐射力(arf)的曲线图。
64.图25是示出单片压电晶体模拟的arf分量(横向与轴向)的比率的曲线图。
65.图26是示出用于具有变化相位的5元件模拟的归一化声辐射力(arf)的曲线图。
66.图27是示出用于5元件模拟的arf分量(横向与轴向)的比率的曲线图。
67.图28是示出异相测试期间阵列的定相的示意图。在测试时,暗元件具有0
°
相位角,并且亮元件具有180
°
相位角。
68.图29是rf电源的电路图,其带有将换能器驱动信号提供至超声换能器的lcl网络。
69.图30是示出针对lc网络的频率响应的曲线图。
70.图31是与图29的rf电源一起使用的降压低通滤波器的电路图。
71.图32是示出用于向换能器提供换能器驱动信号的系统的方框图。
72.图33是示出针对声换能器的频率响应的曲线图。
73.图34是示出用于向换能器提供换能器驱动信号的替代实施例系统的方框图。
74.图35是示出用于获得针对声换能器的控制参数的计算技术的方框图。
75.图36是示出对电压或电流信号进行解调的方框图。
76.图37是包括lc滤波器的rf电源的简化示意图,lc滤波器提供换能器驱动信号。
77.图38是包括lcl滤波器的可替代rf电源的简化示意图,lcl滤波器提供换能器驱动信号。
78.图39是向lcl滤波器提供驱动信号的rf电源的电路图,lcl滤波器向超声换能器提供换能器驱动信号。
79.图40是lcl滤波器电路的电路图,其具有提供电流感测信号的分接头和提供电压感测信号的波节,该电压感测信号可被反馈到控制器(例如,dsp)以控制传递到换能器的驱动信号。
80.图41为具有lcl滤波网络的电源的实施例的示意图,该lcl滤波网络提供换能器驱动信号。
具体实施方式
81.通过参考所需实施方式的以下详细描述和其中包括的实施例,可以更容易地理解本发明。在下面的说明书和随后的权利要求书中,将参考许多术语,这些术语应被定义为具有以下含义。
82.单数形式的“一”、“一个”和“所述”包括复数指称,除非在上下文明确地指明了其它情况。
83.术语“包括”在此用于要求存在所命名的部件/步骤并允许存在其它部件/步骤。术语“包括”应当解释为包括术语“由
……
构成”,其允许仅存在所命名的部件/步骤,以及可由所命名的部件/步骤的制造产生的任何混杂物。
84.数值应当理解为包括:减少到相同数量的有效数字时是相同的数值、以及按照比本技术中所述类型的常规测量技术的试验误差小的方式偏离所提到的值以确定该值的数值。
85.本文所披露的所有范围都包括所列举的端点,并且可以独立组合(例如,“从2克至10克”的范围包括端点2克和10克以及所有中间值)。
86.术语“基本上”和“约”可用于包括可在不改变该值的基本功能的情况下发生改变的任何数值。当与范围一起使用时,“基本上”和“约”也公开了由两个端点的绝对值限定的范围,例如,“约2至约4”的表达也披露了“从2至4”的范围。术语“基本上”和“约”可以指代所表明数字的正负10%。
87.应当注意到,许多术语在本文中使用时是相对用语。例如,术语“上”和“下”在位置上是彼此相对的,也就是,在给定取向上,上部件位于比下部件更高的高度,但如果使设备倒转,则这些术语可能变化。术语“入口”和“出口”是对于给定结构而言相对于通过它们流动的流体来说的,例如,流体通过入口流进该结构,并且通过出口流出该结构。术语“上游”和“下游”是相对于流体流过各种部件所在的方向而言的,也就是,流体在流过下游部件之前流过上游部件。应当注意到,在环路中,第一部件既可以描述为第二部件的上游,也可以描述为第二部件的下游。
88.术语“水平”和“竖直”用来指明相对于绝对基准(即,地平面)的方向。术语“之上”和“之下”或“向上”和“向下”也是相对于绝对基准而言;向上流动总是逆着地球的重力。
89.本技术涉及“同一量级”。如果较大数除以较小数的商是小于10的值,则两个数是同一量级。
90.本发明的声泳分离技术采用超声驻波来俘获主流体流中的颗粒或次流体,即使其保持静止。取决于相对于主流体的颗粒的或次流体的声学对比度因数,颗粒或次流体在多维声驻波的波节或波腹处聚集,以形成簇,当簇已经生长到足够大的尺寸以克服多维声驻波的保持力(例如通过聚结或聚集)时所述簇最终从多维声驻波脱离。声场从颗粒分散导致三维声辐射力,其作用为三维俘获场。当颗粒相对于波长较小时,声辐射力与颗粒体积(例如半径的立方)成比例。其与频率和声学对比度因数成比例。其还随着声学能量(例如声学压力幅值的平方)而增减。对于谐波激励,该力的正弦空间变化驱动颗粒至驻波内的稳定轴向位置。当作用于颗粒的声辐射力强于流体阻力和浮力和重力的组合效果时,颗粒被俘获到声学驻波场内。这种持续的俘获导致了所俘获的颗粒的集中、聚结、成簇、附聚和/或结合,所俘获的颗粒随后通过重力分离连续地从多维声驻波中脱离。该较强的横向力产生了颗粒的快速群集。通过增强的重力分离,一种材料的相对大的固体因而可以从不同材料、相同材料的较小颗粒中和/或主流体中分离。
91.就此而言,对比度因数是颗粒与流体本身的压缩性和密度之间的差异。这些属性是颗粒和流体本身的特征。大部分细胞类型表现出比它们所悬浮于的介质更高的密度和更低的压缩性,从而细胞和介质之间的声学对比度因数为正值。结果,轴向声辐射力(arf)将具有正对比度因数的细胞驱动至压力波节面,同时将具有负对比度因数的细胞或其它颗粒驱动至压力波腹面。声辐射力的径向或横向分量俘获细胞。arf的径向或横向分量大于流体阻力和重力的组合效果。该径向或横向分量将细胞/颗粒驱动至它们能成簇成更大的组的平面,然后它们将连续地从流体中重力分离。
92.随着细胞在驻波的波节处附聚,还存在所出现细胞培养基的物理荡涤(scrubbing),藉此,更多细胞在其与已经保持在驻波内的细胞接触时被俘获。该效果有助于将细胞与细胞培养基分离。压出(expressed)的生物分子保留在营养液流(即细胞培养基)中。
93.对于三维声场,gor'kov的公式可用于计算适用于任何声场的声辐射力f
ac
。初级声辐射力f
ac
被定义为场位势u的函数,
[0094][0095]
其中,场位势u被定义为:
[0096][0097]
并且,f1和f2为由下式定义的单极和双极贡献:
[0098][0099]
其中p是声学压力,u是流体颗粒速度,λ是细胞密度ρ
p
与流体密度ρ
f
的比率,σ是细胞声速c
p
与流体声速c
f
的比率,v0是细胞的体积,以及<>表示在波的周期上的时均。gor'kov的公式适用于小于波长的颗粒。对于较大的颗粒尺寸,ilinskii提供了计算任何颗粒尺寸的3d声辐射力的公式。参见ilinskii,acoustic radiation force on a sphere in tissue,the journal of the acoustical society of america,132,3,1954(2012),其通过引用并入本技术。
[0100]
可以驱动声换能器以产生声波。声波可以用另一个声换能器或反射器进行反射,以产生声驻波。可替代地或另外地,可以驱动两个相对的声换能器以在它们之间产生声驻波。以多模方式在超声换能器中扰动压电晶体允许产生多维声驻波。压电材料或晶体可以被特别设计成在设计频率下以多模方式变形,从而允许产生多维声驻波。可通过压电材料或晶体的不同模式,例如能生成多维声驻波的3x3模式,来生成多维声驻波。大量的多维声驻波也可以通过允许压电材料或晶体经由多种不同的模态振型振动来生成。因此,晶体将激励多种模式,例如0x0模式(即活塞模式)到lxl、2x2、1x3、3x1、3x3以及其它更高阶次模式,并且随后循环回到晶体的较低模式(不必按直接顺序)。压电材料或晶体在模式之间的这种切换或抖动允许在指定时间生成各种多维波形、以及单活塞模态振型。
[0101]
在本发明的一些实施例中,单个超声换能器包含压电元件的矩形阵列,其可以被操作使得阵列的一些部件将与阵列的其它部件异相。该相控阵列布置还可以分离流体流中的材料。可以使用单个压电元件而不是压电阵列。
[0102]
声泳装置的一个具体应用是处理生物反应器材料。在分批补料生物反应器中,在生产循环结束时,重要的是从位于流体流中的压出材料中过滤所有细胞和细胞碎片。压出材料由生物分子如重组蛋白或单克隆抗体组成,并且是待回收的所需产物。通过使用声泳,细胞和细胞碎片的分离非常有效,并且导致压出材料的损失非常小。使用声泳是对当前过滤过程(深度过滤、切向流过滤、离心)的改进,其在高细胞密度下呈现出有限的效率,从而滤床自身中压出材料的损失可高达生物反应器所产生的材料的5%。包括中国仓鼠卵巢
(cho)、ns0杂交瘤细胞、幼仓鼠肾(bhk)细胞、和人体细胞在内的哺乳动物细胞培养的使用,已经证明是生产/表达(expressing)制药所需的重组蛋白和单克隆抗体的非常有效的方法。哺乳动物细胞和哺乳动物细胞碎片通过声泳的过滤有助于大大提高分批补料生物反应器的产量。通过使用多维声波,声泳工艺也可以与上游或下游的标准过滤工艺相结合,例如使用硅藻土的深度过滤、切向流过滤(tff)、或其它物理过滤工艺。
[0103]
另一类型的生物反应器,灌注反应器,使用了来自cho细胞的靶蛋白或单克隆抗体的连续表达。灌注反应器的连续性使得在更快的生产周期中具有小得多的占地面积。在生产/表达蛋白质时使用声泳以在流体流中保持cho细胞是非常有效、且是封闭回路方式的生产。它还允许蛋白质和单克隆抗体的生产效率提高或最大,因为在滤床中没有任何材料丢失。
[0104]
在分批补料生物反应器过程中,声泳装置使用单个或多个驻波来俘获细胞和细胞碎片。具有正对比度因数的细胞和细胞碎片移向驻波的波节(而不是波腹)。随着细胞和细胞碎片在驻波的波节处附聚,还有所出现流体流的物理荡涤(scrubbing),藉此,更多细胞在其与已经保持在驻波内的细胞接触时被捕获。当多维声驻波中的细胞附聚达到其质量不再能被声波保持的程度时,已被俘获的聚集细胞和细胞碎片通过重力脱离流体流,并且能被单独收集。这种效应允许细胞在连续的重力分离过程中被分离。
[0105]
先进的多物理模型和多尺度计算机模型与带有嵌入式控制的高频(mhz)、高功率和高效率超声波驱动器已经被组合,以实现由压电换能器阵列驱动的声谐振器的新设计,产生远远超过目前能力的声泳分离装置。
[0106]
理想地,这种换能器在流体中产生多维驻波,其在悬浮的颗粒/次流体上施加横向力以伴随轴向力,从而增加声泳系统的颗粒俘获能力。文献中公布的典型结果表明,横向力比轴向力小两个数量级。相反,本技术中公开的技术提供的横向力与轴向力具有相同的数量级。
[0107]
所述系统可以由控制器和放大器(未示出)驱动。可以由控制器监控和控制系统性能。可以调制换能器的激励参数。例如,可以调制换能器激励或驱动信号的频率、电流或电压以改变所生成的声驻波的特性。可以通过计算机控制幅度调制和/或频率调制。驻波传播的占空比也可用于实现俘获材料的特定结果。可以以不同的频率打开和/或关闭声驻波以实现期望的结果。
[0108]
由本发明的超声换能器所产生的总声辐射力(arf)的横向力是显著的并且足以克服高达2cm/s及以上的高线速度下的流体阻力。例如,通过本发明的装置的线速度可以小至或小于4cm/min以用于分离细胞/颗粒,并且可以高达2cm/sec以分离油/水相。流率可小至或小于25ml/min,可高达40ml/min至1000ml/min的范围,甚至更高。声泳系统中的这些流率适用于间歇式反应器、分批补料生物反应器和灌注式生物反应器。
[0109]
用于去除油或其它轻于水的材料的实施例的示意图示于图1a中。换能器10施加通常在几百khz到几十mhz范围内的激励频率。在换能器10和反射器11之间产生一个或多个驻波。在微滴或颗粒12附聚、聚集、结块或聚结的压力波腹14处,在驻波中俘获微滴或颗粒12,以及在浮动材料的情况下,上浮至表面并且经由位于流动路径上方的流出物出口16排出。净化流体在出口18处排出。声泳分离技术能以明显降低的成本完成多组分颗粒分离,而没有积垢。
[0110]
用于去除污染物或其它重于水的材料的实施例的示意图示于图1b中。换能器10施加通常在几百khz到几十mhz范围内的激励频率。在污染物附聚、聚集、结块或聚结的压力波节15处,在驻波中俘获流入流体13中的污染物,以及在较重材料的情况下,下沉至底部收集器且经由位于流动路径下方的流出物出口17排出。净化水在出口18处排出。
[0111]
通常,换能器布置成使得它们覆盖流动路径的整个横截面。在特定的实施例中,图1a或图1b的声泳分离系统具有6.375英寸
×
6.375英寸的方形横截面,其以高达5加仑每分钟(gpm)的流率、或12.5mm/sec的线速度工作。换能器10是pzt
‑
8(锆钛酸铅)换能器,具有1英寸
×
1英寸的方形横截面和标称的2或3mhz谐振频率。每个换能器消耗约60w的功率用于以5gpm的流率液滴。该功耗转化为0.500kw hr/m3的能量成本。这种低功率使用表明该技术的能量成本非常低。理想地,每个换能器由其自身的放大器供电和控制。该实施例的一个应用是通过微米级油滴的附聚、聚集、结块或聚结将颗粒尺寸分布转变成更大的液滴。
[0112]
图2是传统超声换能器的剖视图。该换能器具有底端处的耐磨板50、环氧树脂层52、陶瓷晶体54(例如由pzt制成)、环氧树脂层56和背衬层58。在陶瓷晶体的任一侧上,存在电极:正电极61和负电极63。环氧树脂层56将背衬层58附着至晶体54。整个组件容纳在壳体60中,壳体60例如可以由铝制成。电气适配器62提供用于电线的连接,以穿过壳体并且与附着于晶体54的引线(未示出)连接。通常,背衬层设计成增加阻尼,并形成在较宽频率范围内具有均匀位移的宽带换能器,而且设计成以特定振动固有模式抑制激励。耐磨板通常被设计成阻抗变换器,以更好地匹配换能器向其辐射的介质的特征阻抗。
[0113]
图3a是本发明的超声换能器81的剖视图,其可用于声泳分离器。换能器81的形状为圆盘或板,并具有铝制壳体82。压电晶体是大量的钙钛矿陶瓷晶体,每个晶体由在更大的二价金属离子(通常为铅或钡)和o2
‑
离子的晶格中的较小的四价金属离子(通常为钛或锆)组成。作为示例,pzt(锆钛酸铅)晶体86限定换能器的底端,并从壳体的外部露出。该晶体在其周边由位于晶体和壳体之间较小的弹性层(例如硅酮或类似材料)98支承。换句话说,不存在耐磨层。
[0114]
螺钉88将壳体的铝制顶板82a经由螺纹附接至壳体的本体82b。顶板包括用于对换能器供电的连接器84。pzt晶体86的顶表面连接到由绝缘材料94隔开的正电极90和负电极92。电极可以由例如银或镍的任意导电材料制成。电力通过晶体上的电极提供给pzt晶体86。注意,如图2所示,晶体86不具有背衬层或环氧树脂层。换句话说,在换能器中于铝制顶板82a和晶体86之间存在气隙87(即气隙完全是空的)。在一些实施例中可以设置相对最小的背衬58和/或耐磨板50,如图3b所示。
[0115]
换能器的设计可以影响系统的性能。典型的换能器为层状结构,其中陶瓷晶体结合到背衬层和耐磨板。由于换能器加载有由流体所带来的高机械阻抗,耐磨板的传统设计指南,例如针对驻波应用的半波长厚度或针对辐射应用的四分之一波长厚度,以及制造方法可能不合适。而是,在本发明的一个实施例中,换能器不具有耐磨板或背衬,使得晶体(例如多晶、压电材料或单晶(即石英))在其具有高q因子的本征模式之一中振动。振动陶瓷晶体/盘直接暴露于流过流室的流体。
[0116]
去除背衬(例如使晶体背面为空气)还允许陶瓷晶体以较高阶振动模式振动而几乎没有阻尼(例如,高阶模态位移)。在具有带背衬的晶体的换能器中,晶体以更均匀的位移振动,如同活塞。去除背衬允许晶体以非均匀位移模式振动。晶体的模态振型的阶次越高,
晶体的波节线越多。虽然俘获线路与波节的相关性不一定是一对一的,但晶体的高阶模态位移产生了更多的俘获线路,而以更高频率驱动晶体不一定会产生更多的俘获线路。参见下文关于图8至图9d的讨论。
[0117]
在一些实施例中,晶体可具有可最小程度地影响晶体的q因子(例如小于5%)的背衬。背衬可以由基本透声的材料制成,例如轻木、泡沫或软木,其允许晶体以高阶模态振型进行振动并保持高q因子,同时仍然为晶体提供一些机械支撑。背衬层可以是实心的,或者可以是具有穿过该层的孔的晶格,使得晶格以特定的更高阶振动模式遵循振动晶体的波节,在波节位置处提供支撑,同时允许晶体的其余部分自由振动。晶格结构或透声材料的目标是提供支撑而不降低晶体的q因子或干扰特定模态振型的激励。
[0118]
通过避免环氧树脂层和耐磨板的阻尼和能量吸收效应,使晶体与流体直接接触也有助于高q因子。其它实施例可以具有耐磨板或耐磨表面以防止含有铅的pzt接触主流体。在例如生物应用中如分离血液,可能需要在pzt上插入层。这些应用可能使用耐磨层,例如铬、电解镍或无电镀镍(electroless nickel)。化学气相沉积也可用于涂覆一层聚(对二甲苯)(例如聚对二甲苯)或其它聚合物层。有机和生物相容性涂层如硅树脂或聚氨酯也可用作耐磨表面。也可以使用玻璃碳耐磨层。玻璃碳,也称为玻璃质碳(vitreous carbon),是一种非石墨化碳,它将玻璃和陶瓷特性与石墨的特性结合在一起。最重要的特性是耐高温、坚硬(7mohs)、低密度、低电阻、低摩擦和低热阻。玻璃碳还具有极强的抗化学侵蚀性和对气体和液体的不渗透性。
[0119]
在本发明中,在每个超声换能器中使用的压电晶体被改进为压电元件的分段阵列的形式。该阵列用于形成可用于声泳的多维声驻波(一个或多个)。
[0120]
图4示出了用于超声换能器的单片、单件式、单电极压电晶体200。压电晶体具有基本上正方形的形状,其具有基本上彼此相等的长度203和宽度205(例如约一英寸)。晶体200具有内表面202,并且晶体还在晶体的相对侧上具有外表面204,该外表面通常暴露于流过声泳装置的流体。外表面和内表面的面积相对较大,并且晶体相对较薄(例如,对于2mhz晶体,约为0.040英寸)。
[0121]
图5示出了本发明的压电晶体200'。该压电晶体200'的内表面202被分成具有多个(即至少两个)压电元件208的压电阵列206。但是,该阵列仍然是单晶。压电元件208通过内表面202中的一个或多个通道或切口210彼此分开。通道的宽度(即在压电元件之间)可以在约0.001英寸至约0.02英寸的量级。通道的深度可以从大约0.001英寸到大约0.02英寸。在一些情况下,可以将灌封材料212(即,环氧树脂、硅胶等)插入压电元件之间的通道210中。灌封材料212是不导电的,充当相邻压电元件208之间的绝缘体,并且还用于将单独的压电元件208保持在一起。这里,阵列206包含以矩形4x4构造配置(正方形是矩形的子集)的十六个压电元件208(尽管任何数量的压电元件是可能的)。每个压电元件208彼此具有基本相同的尺寸。整个阵列200'具有与图4所示的单晶相同的长度203和宽度205。
[0122]
图6示出了换能器200"的另一个实施例。换能器200"基本上类似于图5的换能器200',除了阵列206由二十五个以5x5配置的压电元件208形成。同样,整个阵列200"具有与图4中所示的单晶相同的长度203和宽度205。
[0123]
本发明的压电阵列中的每个压电元件可以具有单独的电气附件(即电极),使得每个压电元件可以被单独地控制频率和功率。这些元件可以共用共同的接地电极。该配置不
仅允许产生多维声驻波,而且还能改进对声驻波的控制。
[0124]
压电阵列可以通过横过一个表面进行切割以便将压电晶体的表面分成单独的元件而由单片压电晶体形成。表面的切割可以通过使用锯、端铣刀或其它设施来执行,以从表面移除材料,并将压电晶体的离散元件留在由此形成的通道/凹槽之间。
[0125]
如上所述,灌封材料可以结合到元件之间的通道/凹槽中以形成复合材料。例如,灌封材料可以是聚合物,例如环氧树脂。在特定实施例中,压电元件208彼此单独地物理隔离。这种结构可以通过用灌封材料填充通道210,然后对外表面204切割、打磨或研磨到通道而获得。结果,压电元件通过灌封材料彼此结合,并且每个元件是阵列的单独部件。换言之,每个压电元件通过灌封材料与周围的压电元件物理地隔开。图21是比较这两个实施例的剖视图。在顶部,示出了图5中所示的晶体。晶体在内表面202上被切割成四个分开的压电元件208,但是这四个元件共用共同的外表面204。在底部,四个压电元件208通过灌封材料212彼此物理隔离。四个元件之间不共享共同表面。
[0126]
在本系统中,系统在一定电压下运行,使得颗粒被俘获在超声驻波中,即保持在静止位置。颗粒沿着限定好的、以半波长间隔的俘获线路被收集。在各波节面内,以最小的声辐射势能俘获颗粒。声辐射力的轴向分量驱动带有正对比度因数的颗粒到达压力波节面,而带有负对比度因数的颗粒则被驱动到达压力波腹面。声辐射力的径向或横向分量是俘获颗粒的力。在使用典型换能器的系统中,声辐射力的径向或横向分量通常比声辐射力的轴向分量小几个数量级。然而,本发明的装置中的横向力可以是显著的,与轴向力分量处于相同的数量级,并且足以克服线速度高达1厘米/秒的流体阻力。如上面所讨论的,与晶体如同具有均匀位移的活塞那样有效移动的振动形式相反,可以通过驱动换能器呈高阶模态振型来增大横向力。声压与换能器的驱动电压成正比。电功率与电压的平方成正比。
[0127]
在操作期间,可以驱动本发明的压电阵列,使得压电元件彼此同相。换句话说,每个压电元件产生具有相同频率且没有时移的多维声驻波。在其它实施例中,压电元件可以彼此异相,即存在不同的频率或时移,或者它们具有不同的相位角。如下面将要进一步描述的,在更具体的实施例中,阵列中的元件排列成以90
°
的倍数(即90
°
和/或180
°
)异相的组或集。
[0128]
在实施例中,对换能器进行驱动的脉冲电压信号可以具有正弦波、方波、锯齿波或三角波形;并且具有500khz至10mhz的频率。脉冲电压信号可以用产生任何所需波形的脉冲宽度调制驱动。脉冲电压信号还可以具有幅度或频率调制开始/停止能力,以消除串流(streaming)。
[0129]
图7是线性
‑
对数图(线性y轴,对数x轴),其示出了声辐射力、流体阻力、以及浮力随颗粒半径的计算标度。浮力适用于负对比度因数颗粒,例如本实施例中的油颗粒。计算的浮力可包括重力的元素。在使用正对比度因数颗粒(其可以是某些类型的细胞)的实施例中,在图中使用表示重力的线用于表示声辐射力和流体阻力的这种正对比度因数颗粒。在图7所示的本实施例中,对于试验中所使用的典型sae
‑
30油滴进行了计算。浮力是依赖于颗粒体积的力,例如与半径立方成比例,并且对于微米量级的颗粒尺寸而言相对可忽略不计,但是对于数百微米量级的颗粒尺寸则增长并变得显著。流体阻力随流体速度线性变化,例如与半径平方成比例,并且通常超过微米尺寸颗粒的浮力,但对数百微米量级的较大尺寸颗粒的影响较小。声辐射力定标的作用与流体阻力或浮力不同。当颗粒尺寸小时,声俘获力
与颗粒的颗粒半径(体积)的立方以接近线性比率成比例。最终,随着颗粒尺寸的增大,声辐射力不再随着颗粒半径的立方线性增加。随着颗粒尺寸继续增大,声辐射力迅速减小,并且在某一临界颗粒尺寸处,是局部最小值。为了进一步增加颗粒尺寸,辐射力的大小再次增加,但具有相反的相位(曲线图中未示出)。重复该模式以增大颗粒尺寸。颗粒尺寸与声辐射力的关系至少部分地取决于声驻波的波长或频率。例如,随着颗粒增大到半波长尺寸,颗粒上的声辐射力降低。当颗粒尺寸增加到大于半波长且小于全波长时,颗粒上的声辐射力增大。
[0130]
起初,当悬液以最初较小微米级颗粒流过声驻波时,声辐射力平衡了流体阻力和浮力的综合作用,以将颗粒俘获在驻波中。在图7中,俘获发生在约3.5微米的颗粒尺寸,标记为r
c1
。根据图7所示的曲线图,随着颗粒尺寸继续增加超过r
c1
,较大的颗粒被俘获,因为声辐射力与流体阻力相比增大了。当较小颗粒被俘获在驻波中时,会发生颗粒聚结/结块/聚集/附聚,从而导致有效颗粒尺寸的持续生长。当较大的颗粒被保持并且尺寸增大时,其它较小的颗粒继续被驱赶到驻波中的俘获位置,导致连续俘获。随着颗粒尺寸的增大,颗粒上的声辐射力增加,直到达到颗粒尺寸的第一区域。随着颗粒尺寸增加超过第一区域,颗粒上的声辐射力开始减小。随着颗粒尺寸的持续增长,声辐射力迅速下降,直到浮力变为主导,其由第二临界颗粒尺寸r
c2
表示,具有此尺寸的颗粒将上升或下沉,这取决于它们相对于主流体的相对密度或声对比度因数。当颗粒上升或下沉并离开声驻波的波腹(在负对比度因数的情况下)或波节(在正对比度因数的情况下)时,颗粒上的声辐射力可能会减小到可以忽略不计的量。声辐射力继续俘获较小和较大的颗粒,并将俘获的颗粒驱动到俘获位置,在本实施例中该俘获位置位于压力波腹处。较小的颗粒尺寸遭受了减小的声辐射力,其例如降低到表示在点r
c1
附近的声辐射力。随着其它颗粒在声驻波的波节或波腹处被俘获并聚结、团聚、聚集、成团和/或群集在一起,有效地增加了颗粒尺寸,从而声辐射力增大并且循环重复。所有的颗粒都不会从声驻波脱离,而那些剩余的颗粒在尺寸上可能会继续增大。因此,图7解释了小颗粒如何在驻波中被连续俘获,生长成较大的颗粒或团块,然后由于浮力、阻力和声辐射力与颗粒尺寸之间的关系最终上升或沉降。
[0131]
换能器的尺寸、形状和厚度决定了不同激励频率下换能器的位移,其进而又影响油分离效率。通常,换能器以接近厚度谐振频率(半波长)的频率操作。换能器位移中的梯度通常导致更多油被俘获的位置。更高阶模态位移在所有方向上于声场中产生具有强梯度的三维声驻波,从而在所有方向上产生相同强度的声辐射力,导致多个俘获线路,其中俘获线路的数量与换能器的特定模态振型相关。
[0132]
图8示出了所测得的1"方形pzt
‑
8 2
‑
mhz换能器的电阻抗幅值,其作为在2.2mhz换能器谐振附近的频率的函数。换能器电阻抗中的最小值对应于水柱的声谐振,并且表示操作所用的潜在频率。数值建模已经表明,换能器位移轮廓在这些声谐振频率处明显变化,从而直接影响声驻波以及所产生的俘获力。由于换能器在其厚度谐振附近操作,因此电极表面的位移基本异相。换能器电极的典型位移是不均匀的,并且取决于激励频率而变化。作为示例,在具有单条油滴俘获线路的一种激励频率下,位移具有处于电极中间的单个最大值、以及靠近换能器边缘的最小值。在另一激励频率下,换能器轮廓具有多个最大值,导致多条油滴俘获线路。越高阶换能器位移模式,导致越高俘获力以及用于俘获油滴的多个稳定的俘获线路。
[0133]
为了研究换能器位移轮廓对声俘获力和油分离效率的影响,在除激励频率之外的所有条件相同的情况下,重复试验10次。在图8中用带圆圈的数字1
‑
9和字母a表示的十个相继的声谐振频率被用作激励频率。阻抗中的这些振荡对应于声泳系统的谐振。声泳系统的长度为2"时,振荡间隔约15khz。条件为:试验持续时间为30分钟、约5微米sae
‑
30油滴的1000ppm的油浓度、500毫升/分钟(ml/min)的流率、以及在1英寸宽x 2英寸长的截面中施加的20w功率。
[0134]
随着乳状液通过换能器,观察油滴的俘获线路并使其特征化。对于图8中所标识的十个谐振频率中的七个,涉及穿过流道的俘获线路数量的观察以及样式的特征,如图9a中所示。
[0135]
图9b示出本系统的等轴图,其中确定了俘获线路的位置。图9c是本系统沿箭头114俯视入口时本系统所呈现的图。图9d是沿箭头116直接在换能器面处观看时本系统所呈现的图。图9b至图9d中所示的俘获线路为在图8和图9a中以频率4产生的那些俘获线路。
[0136]
激励频率的效果显然确定了俘获线路的数量,俘获线路的数量从声谐振激励频率5和9处的单个俘获线路变化至关于声谐振频率4的9个俘获线路。在其它激励频率处,观察到4个或5个俘获线路。换能器的不同位移轮廓能在驻波中产生不同(更多)的俘获线路,而位移轮廓中的更大梯度通常产生更高的俘获力和更多的俘获线路。
[0137]
表1总结了使用类似于图10a的一种系统的油俘获试验的发现。一个重要结论是,声分离器的油分离效率与换能器的模态振型直接相关。越高阶位移轮廓产生越大的声俘获力和更多的俘获线路,导致更佳的效率。对定标(scaling)研究有用的第二个结论是,测试表明,以500ml/min(毫升/分钟)捕获5微米油滴暗示了每1"的声束跨度、每平方英寸换能器面积需要10瓦功率。主要耗损是声驻波的总体积中的热粘性吸收的耗损。与此流率相关的能源成本是每立方米0.500千瓦时。
[0138]
表1:俘获模式效率研究
[0139][0140]
图10a中示出了一种4"
×
2.5"的流动截面面积的中等规模设备124,用于将主流体与浮动流体或颗粒分离。声学路径长度是4"。在此示出的设备处于流动方向向下的朝向,其用来从主流体中分离低密集度颗粒。然而,本设备可以基本上完全颠倒,以允许分离比主流体重的颗粒。代替在向上方向上的浮力,由于重力引起的凝聚颗粒的重量将它们向下拉。应该注意的是,该实施例被描绘为具有流体竖直流动的取向。然而,也可以想到流体以水平方向或者以一定角度流动。
[0141]
含有颗粒的流体通过入口126进入本设备,进入到环形容室(plenum)131中。环形容室具有环形内径和环形外径。应注意,术语“环形”在此用于指代两个形状之间的区域,并
且容室不需要是圆形的。在此图示中可以看到两个入口,尽管可以预想根据需要设置任意数量的入口。在特定实施例中,使用了四个入口。这些入口径向地对置和取向。
[0142]
异型管嘴壁129以这样的方式减小流动路径的外径,即使得越靠近壁区产生更高的速度并且减小湍流,从而随着流体速度曲线发展而产生接近活塞流,也就是,使流体在中心线方向上向下加速,只带有很少甚至没有周向运动分量、以及较低的流动湍流。该室流动曲线对于声学分离和颗粒收集是可取的。流体通过连接管道127,并且进入流动/分离室128。在图10b的放大异型管嘴129中可以看到,管嘴壁还向悬浮颗粒加入径向运动分量,使颗粒移动而更靠近于本设备的中心线,并且与上升、浮动的聚集颗粒产生更多碰撞。在到达分离室之前,该径向运动允许从连接管道127中的流体中最有利地荡涤出(scrubbing)颗粒。异型管嘴壁129以在收集管道133的入口处产生大规模涡流的方式引导流体,从而也提高颗粒收集。总体而言,装置124的流动区设计成自环形容室131至分离室128持续减小,以保证低湍流和涡流形成,从而便于更好的颗粒分离、凝聚、以及收集。管嘴壁具有宽端和窄端。术语“荡涤”用来描述颗粒/液滴附聚、聚集、结块或聚结的过程,其在较大颗粒/液滴在与流体流动相反的方向上行进且与较小颗粒碰撞时发生,实际上,将较小颗粒荡涤出悬液。
[0143]
回到图10a,流动/分离室128包括位于该室的相对侧的换能器阵列130和反射器132。使用中,在换能器阵列130与反射器132之间产生多维驻波134。这些驻波可以用来附聚颗粒,并且这种取向用来附聚浮动的颗粒(例如油)。然后,含有残留颗粒的流体通过流动出口135排出。
[0144]
随着浮动颗粒附聚,它们最终克服流体流动阻力和声辐射力的共同作用,并且它们的浮力136足以促使浮动颗粒向上升起。在这一方面,收集管道133被环形容室131包围。较大的颗粒将通过此管道,并进入收集室140。该收集室也可以是出口管道的一部分。收集管道和流动出口位于设备的相反端。
[0145]
应当注意到,分离室128中所形成的浮动颗粒随后通过连接管道127和管嘴壁129。由于管嘴壁所施加向内径向运动,这种布置使得来自环形容室的流入流从上升的附聚颗粒上流过。
[0146]
本发明的换能器配置产生三维压力场,其包括垂直于流体流动的驻波。压力梯度足够大以在横向方向上,例如与驻波方向正交的方向上(即声泳力平行于流体流动方向)产生声泳力,其与波方向上的声泳力具有同等数量级。这些力增强了在流室中和沿限定好的俘获线路的颗粒俘获、聚集和收集,与常规设备中只在收集面中俘获颗粒完全不同。颗粒具有足够的时间移向驻波的波节或波腹,产生了颗粒可集中、附聚和/或聚结、随后浮力/重力分离的区域。
[0147]
在一些实施例中,流体流动具有高达1500的雷诺数,也就是,正在发生层流。对于工业上的实际应用,对于通过系统的流动而言雷诺数通常为10至1500。颗粒相对于流体运动的移动产生了远低于1.0的雷诺数。雷诺数表示给定流场中惯性流动效应与粘性效应之比。对于低于1.0的雷诺数,粘性力在流场中是占优势的。这种情况导致显著的阻尼,其中剪切力在整个流动中占主导地位。这种粘性力占优势的流动称为stokes流。糖蜜的流动是一种示例。在这种条件下,壁轮廓控制和流线型化只有很小的重要性。这些特性与非常粘稠的流体的流动或非常微小的通道(如mems设备)中的流动相关。入口轮廓控制具有很小的重要性。声泳颗粒分离器中颗粒相对于流体的流动将是stokes流,这是因为颗粒直径以及颗粒
与流体之间的相对速度都很小。另一方面,关于流过本系统的流动的雷诺数将远大于1.0,这是因为流体速度和入口直径非常大。
[0148]
对于远大于1.0的雷诺数,粘性力在流动与表面接触的地方占主导地位。靠近表面的这种粘性区称为边界层,并且由ludwig prandtl首先认识到。在管道流动中,对于管道中的已完全形成的流动,如果雷诺数明显高于1.0并且低于2300,则流动将是层流。壁处的壁剪切应力将随距离扩散进入流中。在管道的入口处,流速开始偏离均匀。随着流动顺着管道向下移动,壁粘性力的作用将朝中心线向内扩散,以产生抛物线速度分布。这种抛物线分布将具有峰值,该峰值是平均速度的两倍。抛物线分布的发展所要求的管道长度是雷诺数的函数。对于20的雷诺数(该雷诺数对于cho操作是有代表性的),发展长度是1.2倍管道直径。因此,完全发展的流动非常快地发生。中心的这种峰值速度对声波颗粒分离会是不利的。同样,在层流雷诺数处,湍流可能出现,并且流动表面轮廓化在控制流动方面是非常重要的。由于这些原因,将分离器设计成带有环形入口容室和收集管道。
[0149]
大环形容室后接有入口壁管嘴,其将流体加速并朝着中心线向内引导,如图10b中所示。壁轮廓对分布具有较大影响。区域收敛增加了流动平均速度,但正是壁轮廓决定速度分布。管嘴壁轮廓将是流线型的,并且在所述分离器中设计有较小的曲率半径。
[0150]
(一个或多个)换能器用来建立压力场,该压力场在与驻波方向正交的方向以及驻波方向上都产生同等量级的力。当这些力是大致同等量级时,大小为0.1微米至300微米的颗粒将更有效地朝附聚区(“俘获线路”)移动。因为正交声泳力分量中同等大小的梯度,因而存在没有位于换能器130与反射器132之间的在驻波方向上的常规部位中的“热点(hot spots)”或颗粒收集区。热点位于声辐射势能的最小值处。这种热点表示颗粒收集位置。
[0151]
声泳装置的一个应用是将生物治疗性蛋白质与产生蛋白质的生物细胞分离。在这方面,现有的分离方法利用过滤或离心,这两种中的任何一种都会损害细胞,同时释放蛋白质碎片和酶进入纯化处理,并且增加对纯化系统下游部分的负担。期望的是,能处理具有更高细胞密度的体积,因为这允许收集更大量的治疗性蛋白质和更好的成本效益。
[0152]
图11a和图11b是示出声泳分离器的各部分的分解图。图11a只有一个分离室,而图11b具有两个分离室。
[0153]
参见图11a,流体通过四端口入口191进入分离器190。这里也可以看到环形容室。设置过渡件192以产生通过分离室193的活塞流。该过渡件包括一个异型管嘴壁,如图10a所示的那样,其具有弯曲形状。换能器40和反射器194位于分离室的相对壁上。随后,流体通过出口195离开分离室193和分离器。分离室具有矩形的流动路径几何形状。
[0154]
图11b中具有两个分离室193。系统联结器196置于两个室193之间,以将它们结合起来。
[0155]
声泳分离已经在中国仓鼠卵巢(cho)细胞的不同株上进行了测试。在一个试验中,使用如图11a中所描绘的系统,对具有8.09x 106细胞/毫升(cells/ml)的初始细胞密度、1,232ntu浊度、以及细胞活力约75%的溶液进行分离。换能器是2mhz晶体,运行于约2.23mhz,消耗24
‑
28瓦。使用了25毫升/分钟(ml/min)的流率。此试验的结果示于图12a中。
[0156]
在另一试验中,对具有8.09x 106细胞/毫升的初始细胞密度、1,232ntu浊度、以及细胞活力约75%的溶液进行分离。此cho细胞株具有双峰颗粒尺寸分布(在尺寸12微米和20微米处)。结果示于图12b中。
[0157]
图12a和图12b是由贝克曼库尔特细胞活力分析仪(beckman coulter cell viability analyzer)产生的。其它测试表明在从流体分离细胞时,1mhz和3mhz的频率不如2mhz有效。
[0158]
在以10升/小时流率进行的其它测试中,捕获了99%的细胞,并且证实了细胞活力高于99%。在以50毫升/分钟(即3升/小时)流率进行的其它测试中,得到了3x 106细胞/毫升(cells/ml)的最终细胞密度,并且具有接近100%的活力,而且几乎没有温度上升。在又一些测试中,在6升/小时流率下,得到了95%的浊度降低。
[0159]
使用酵母作为cho的模拟物,对生物应用进行了图10a至10b所示的对标定单元(scaled unit)的测试。对于这些测试,在15升/小时流率下,测试了不同频率以及功率水平。表2示出了测试的结果。
[0160]
表2:15升/小时流率下2.5"x 4"系统的结果
[0161]
频率(mhz)30瓦37瓦45瓦2.221193.981.484.02.228385.578.785.42.235689.185.881.02.24386.7
‑
79.6
[0162]
在生物应用中,许多部件,例如通向或来自壳体、入口、排出容室、以及进入容室等的管件都可以是一次性的,只有换能器和反射器要进行清洁以便重新使用。避开离心机和过滤器可以更好地分离cho细胞,而不降低细胞的活力。声泳分离器的形状因数也小于过滤系统的形状因数,允许cho分离小型化。换能器也可以被驱动以产生快速压力变化,以避免或清除由于cho细胞附聚所致的阻塞。换能器的频率也可以改变,以获得给定功率下的最佳效力。
[0163]
提供以下实施例说明本发明的设备、部件和方法。这些实施例仅仅是说明性的,并不意图将本发明限制于其中所述的材料、条件或工艺参数。
[0164]
实施例
[0165]
使用comsol模拟软件为声泳装置开发了二维数值模型。该模型在图13中示出。所述装置包括铝制壁222和与该壁相对的不锈钢反射器224。嵌入在壁中的是压电换能器230。如图所示,换能器是4元件压电阵列的形式。壁222和反射器224限定流室,箭头225指示流体通过流室的流动方向。压电换能器与流体直接接触。还示出了通道/切口210和灌封材料212,尽管在模拟中未使用灌封材料。
[0166]
运行模拟软件,并将其输出与公布的数据(barmatz,j.acoust.soc.am.77,928,1985)进行比较。图14a比较了声学位势u。图14b比较了声辐射力(arf)的x分量。图14c比较arf的y分量。图14d比较了arf的绝对值。在这些图中,公布的数据位于顶部,而数值模型结果位于底部。从这里可以看出,数值模型的结果与公布的数据相匹配,这验证了数值模型以及由此产生的后续计算。
[0167]
然后运行三种不同的模拟来使用以下三种不同的压电换能器对从水中分离sae 30油滴进行建模:1元件换能器(即单晶)、4元件换能器、和5元件换能器。换能器以相同的频率操作,并且以下参数用于油和水:油颗粒半径(rp)=10μm;油密度(ρ
p
)=865kg/m3;油中声速(c
p
)=1750m/sec;颗粒速度(μ
f
)=0.001kg/m sec;水密度(ρ
f
)=1000kg/m3;和水中声速
(c
f
)=1500m/sec。
[0168]
对于4元件换能器,每个通道的宽度为0.0156英寸且深度为0.0100英寸,并且每个元件的宽度为0.2383英寸(换能器的总宽度为1英寸)。对于5元件换能器,每个通道的宽度为0.0156英寸且深度为0.0100英寸,并且每个元件的宽度为0.1875英寸。
[0169]
图15示出了使用1
‑
元件换能器对颗粒上的力的模拟,其是pzt晶体200的二维表示。图16示出了使用4元件换能器对颗粒上的力的模拟,其是pzt晶体200'的二维表示。图17示出了使用5元件换能器对颗粒上的力的模拟,其是pzt晶体200"的二维表示。无论元件的数量如何,每个换能器具有相同的宽度。可以清楚地看到由此产生的多维声驻波的幅度(较亮区域的幅度高于较暗区域的幅度)。
[0170]
接下来,在4元件阵列上进行模拟,以比较相位对波的影响。流率为500ml/min,流体的雷诺数为220,每个元件的输入电压为2.5vdc,并且每个元件的dc功率为1瓦。在一个模拟中,四个元件相互处于0
‑
180
‑0‑
180相位(即异相)。在另一个模拟中,这四个元件彼此同相。然后将模拟与用如图18所示具有4x4压电阵列的换能器装置进行的实际试验进行比较。
[0171]
图19比较了异相模拟(左)与图片(右)的结果,其示出了当在图18的换能器装置中使用异相阵列时的实际结果。结果非常相似。在模拟中振幅高的地方,在实际图片中可以看到被俘获的颗粒。
[0172]
图20比较了同相模拟(左)与图片(右)的结果,其示出了当在图18的换能器装置中使用同相阵列时的实际结果。结果非常相似。
[0173]
如下表3所示,对于直径20微米的油滴,在2.19mhz至2.25mhz的扫频范围内,使用4元件换能器和5元件换能器进行另外的数值模型,在不同的布置中同相或异相。异相意味着相邻元件以不同的相位被激励。
[0174]
图22是示出针对4元件阵列进行模拟的两个异相模式的示意图。左侧示出了0
‑
180
‑0‑
180模式,而右侧示出了0
‑
180
‑
180
‑
0模式。图23是示出针对5元件阵列进行模拟的四个异相模式的示意图。左上图显示了0
‑
180
‑0‑
180
‑
0模式。右上角的图片显示了0
‑0‑
180
‑0‑
0模式。左下图显示了0
‑
180
‑
180
‑
180
‑
0模式。右下图显示了0
‑
90
‑
180
‑
90
‑
0模式。
[0175]
在该频率范围内确定声辐射力的横向(x轴)力分量与轴向(y轴)力分量的比率,并且该比率的范围列于下表3中。
[0176]
表3
[0177]
换能器相位最小比率最大比率1
‑
元件(单晶) ~0.15~0.754
‑
元件阵列同相~0.08~0.544
‑
元件阵列(0
‑
180
‑0‑
180)~0.39~0.944
‑
元件阵列(0
‑
180
‑
180
‑
0)~0.39~0.925
‑
元件阵列同相~0.31~0.855
‑
元件阵列(0
‑
180
‑0‑
180
‑
0)~0.41~0.875
‑
元件阵列(0
‑0‑
180
‑0‑
0)~0.41~0.815
‑
元件阵列(0
‑
180
‑
180
‑
180
‑
0)~0.40~0.855
‑
元件阵列(0
‑
90
‑
180
‑
90
‑
0)~0.38~0.81
[0178]
图24示出了来自单个压电晶体模拟的归一化声辐射力(arf)。使用测量的电压和
电流计算的有功功率(real power)对arf值进行归一化。图25示出了在测试的频率范围内针对单个压电晶体模拟的arf分量(横向与轴向)的比率。图26示出了来自5元件模拟的归一化声辐射力(arf)。图27示出了在测试的频率范围内针对5元件模拟的arf分量(横向与轴向)的比率。比较图24至图26,1元件模拟的峰值arf约为6e
‑
11,而5元件模拟的峰值arf约为2e
‑
9。比较图25至图27,力的比率也更加一致,与约0.40相比变化约为0.60。
[0179]
总体而言,4元件和5元件阵列产生高比率,包括大于0.9的一些比率。一些模拟还具有几乎比1
‑
元件换能器(用作基线)产生的幅值高两个数量级的声辐射力幅值。
[0180]
然后测试试验性的16元件阵列和25元件阵列。进料溶液是3%填充的细胞团块酵母溶液,用作生物应用的cho细胞的模拟物。对于异相测试,使用0
°
和180
°
相位的棋盘图案(checkerboard pattern)。对于25元件阵列,12个元件为180
°
且13个元件为0
°
。这些棋盘图案在图28中示出。左侧是16个元件的阵列且右侧是25个元件的阵列,不同的阴影表示不同的相位角。
[0181]
在30分钟后以各种频率测量进料、浓缩物和渗透物的浊度。浓缩物是离开装置的部分,其含有浓缩的酵母,以及一些流体。渗透物是离开装置的过滤部分,其主要是液体,具有低得多的酵母浓度。较低的浊度表明较低量的酵母。捕获效率确定为(进料
‑
渗透物)/进料*100%。进料率为30ml/min,且浓缩物流率为5ml/min。换能器的功率设定为8w。
[0182]
表4列出了单元件换能器的结果,其用作基线或控制。
[0183]
表4
[0184]
频率(mhz)2.2252.244浓缩物(ntu)15,40015,400渗透物(ntu)262327进料(ntu)4,5505,080捕获效率(%)94.293.6
[0185]
表5列出了16元件同相试验的结果。
[0186]
表5
[0187]
频率(mhz)2.222.2252.232.2422.2432.2442.2552.26浓缩物(ntu)22,70024,30022,50024,60023,10028,10027,40023,800渗透物(ntu)205233241201249197244165进料(ntu)5,0804,8505,1004,8304,8105,0804,9404,830捕获效率(%)96.095.295.395.894.896.195.196.6
[0188]
表6列出了16元件异相试验的结果。
[0189]
表6
[0190]
频率(mhz)2.222.2252.232.2422.2432.2442.2552.26浓缩物(ntu)40,90021,40026,00049,30019,10055,80022,10035,000渗透物(ntu)3513693821,690829761397581进料(ntu)5,5904,8705,8605,1605,0404,8704,8005,170捕获效率(%)93.792.493.567.283.684.491.788.8
[0191]
比较16元件阵列彼此的结果和控制,同相阵列在整个频率范围内保持高捕获效率,而异相阵列在2.24mhz附近迅速下降。效率结果与大多数同相测试的控制非常相似。同
相效率在每个频率下都高于异相效率。
[0192]
表7列出了25元件同相试验的结果。
[0193]
表7
[0194]
频率(mhz)2.21902.23002.23552.24702.24752.24802.24852.2615浓缩物(ntu)13,30019,80020,90021,40013,70017,30019,00019,500渗透物(ntu)9506692831,0441,0941,164688797进料(ntu)4,9304,9304,9105,0104,9505,2205,0105,110捕获效率(%)80.786.494.279.277.977.786.384.4
[0195]
表8列出了25元件异相试验的结果。
[0196]
表8
[0197]
频率(mhz)2.21902.23002.23552.24702.24752.24802.24852.2615浓缩物(ntu)14,605
‑
21,70018,02523,42522,57521,90022,450渗透物(ntu)2,5682,5411,4841,1341,0059879052,034进料(ntu)5,6106,0205,2006,0105,8805,8405,8605,880捕获效率(%)54.257.871.581.182.983.184.665.4
[0198]
比较25元件阵列彼此的结果和控制,两个阵列的效率都低于控制。25元件同相阵列的峰值在95%左右,并且然后在两个方向上都会下降。异相阵列的峰值效率约为85%,并且急剧下降。效率结果与控制非常相似。应该注意的是,使用数值模型发现的高峰值幅度尚未通过试验测试。
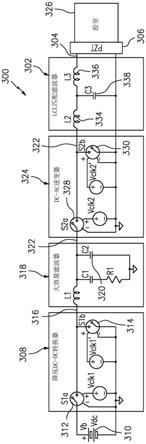
[0199]
图29是具有lcl滤波网络302的rf电源300的电路图,该lcl滤波网络将线路304上的换能器驱动信号提供给超声换能器306。在该实施例中,dc
‑
dc转换器308从电源310接收第一dc电压,并且开关312、314(例如功率mosfet)在控制器(未示出)的控制下被协同切换,以产生在线路316上提供的脉冲宽度调制(pwm)信号。开关312、314由控制器产生的第一互补时钟信号驱动,并具有相同的频率和占空比(duty cycle)。开关可以不同时闭合,并且开关动作产生穿过开关314的斩波电压v
b
。线路316上的合成pwm信号由滤波器318(例如降压滤波器)接收,该滤波器对线路318上的信号进行滤波,使得跨过电容器c
2 320出现平均电压,并且该合成pwm信号在线路322上被提供给dc
‑
ac逆变器324。选择滤波器318的带宽,使得线路322上的电压跟随时钟信号的占空比的变化,其中时钟信号基于声腔326中的动态变化驱动开关312、314。由控制器产生的第二互补时钟信号驱动开关328、330以执行dc到ac变换,并且在线路332上提供合成ac信号。随后将ac信号输入到匹配的滤波网络302(例如lc、lcl等),该滤波网络对输入进行滤波以对输入的较高频率分量进行衰减并在线路304上提供诸如正弦波的周期信号从而驱动换能器306。在该实施例中,lcl滤波器302包括分别串联连接的电感器l2、l2、334、336和电容器c3 338,该电容器从电感器334、336之间的波节延伸到地面。lcl电路302对逆变器324的输出进行滤波,并将换能器306与逆变器324匹配以改善功率传输。
[0200]
匹配滤波器302提供阻抗定标(impedance scaling)以获得用于逆变器驱动器的适当负载。匹配滤波器可以被认为是网络,其被调谐以通过换能器306提供期望的功率传输(例如优化的功率传输)并进入谐振腔326。用于实施滤波器302(例如lc或lcl)的考虑因素包括换能器306和谐振腔326的组合响应。根据一个实施例,当声换能器在多维模式或多模
式下操作时,例如以产生一个或多个初级或主要振动模式的多个重叠振动模式操作时,滤波器允许期望的功率传输,例如优化的功率传输。期望的操作模式是处于如下频率,所述频率对应于换能器的响应、和/或换能器/谐振腔组合的响应的较低或极小电抗点。
[0201]
对于固定的谐振频率,匹配滤波器302可以基于根据用于形成匹配滤波网络的电感器和电容值组合的(一个或多个)系统谐振传递不同的功率值。图30示出了配置为lc网络的匹配滤波器的响应曲线,其电感值为1.596uh,电容值为3.0nf。lc网络的谐振频率为2.3mhz。参照图30,电阻阻抗标记为a,电抗性阻抗(reactive impedance)标记为b,输入有功功率标记为c,并且进入腔体的声学有功功率标记为d。关于传输给系统的功率,用相同的谐振增加电容值会提升进入系统的功率。通常,改变电感器和/或电容器的值可以影响lc网络的谐振频率。改变lc网络的谐振频率会使发生最佳功率传输的频率发生改变,并且可能影响传输效率。例如,用于相对于系统的输入阻抗的较低或最低电抗点(标记b)的最佳功率传输的频率受lc网络的谐振频率的影响。
[0202]
图30中的图表示出了在电抗极小值处的在输入有功功率(c)和声学有功功率(d)上的点。输入有功功率和声学有功功率相当匹配,表明有效的功率传输。如果电感器的值变为0.8uh并且电容器的值变为6.0nf,则相同的电抗极小值以稍低的效率产生更大的功率传输。当输入有功功率(c)与声学有功功率(d)明显不同(前者大于后者)时,功率传递的效率变低。在某些情况下,取决于电感值和电容值,功率传输可以是高效的,然而频率操作点可能不处于极小电抗点(b)。相应地,可以在操作换能器以在声学室中获得高效的分离、暗示极小电抗点、以及获得了向腔室的有效功率传输之间作出选择。对于被分离的给定材料以及给定的换能器,能够以获得向声腔的有效功率传输从而提高整体系统效率的谐振频率选择lc网络。
[0203]
图31是图29中所示的降压滤波器318的一个实施例的电路图。以示例的方式呈现了图31中所示的部件值,可以使用其它值和部件组合来提供期望的滤波。
[0204]
图32是用于将线路352上的换能器驱动信号提供给声换能器354的系统350的方框图。参照图32,系统350控制与声学室356耦接的换能器354。声换能器354由rf功率转换器驱动,该rf功率转换器由dc电源358(如48伏dc)、dc
‑
dc转换器360(如降压转换器)、和rf dc
‑
ac逆变器362组成。线路364上的逆变器输出驱动信号被输入到低通滤波器365(例如匹配低通滤波器的lc或lcl,如图29所示),并且对线路367上的合成滤波信号进行感测以获得线路366上的电压感测信号和线路368上的电流感测信号,这些信号被反馈到控制器370。控制器370向转换器360和逆变器362提供控制信号,以控制线路364上的驱动信号。
[0205]
由控制器370提供给转换器360的信号是脉冲宽度测量值,其确定了转换器360中的切换信号的占空比。占空比确定线路372上的转换器输出信号上的dc电平,其被施加至逆变器362。例如,占空比越大,线路372上的dc输出越高。控制器370向逆变器362提供确定逆变器的操作频率的控制信号。提供给逆变器362的控制信号可以是切换信号,用于逆变器中的切换开关(例如fet),图29示出了这种开关的一个示例。可替代地或另外地,控制器370可以向逆变器362提供用于指示期望切换频率的控制信号,并且逆变器内部的电路解译该控制信号并且根据解译的控制信号切换内部开关。
[0206]
线路366上的电压感测信号和线路368上的电流感测信号作为反馈信号被提供给控制器370,以控制线路364上提供给声换能器354的驱动信号。控制器370对线路366、368上
的反馈信号进行操作和计算,例如以获得功率测量值p=v*i,或获得相位角,θ=arctan(x/r)。
[0207]
控制器370配备有控制方案,该控制方案接收诸如功率输出、频率操作范围或其它用户可选参数的进程设置,并基于进程设置和反馈值向转换器360和逆变器362提供控制信号。例如,如上所述,控制器可以对提供给逆变器362的频率范围中的多个频率进行排序,从而扫描频率范围并确定换能器354的特性或换能器354与可能处于负载下的声学室356组合的特性。就从线路366、368上的反馈信号获得的电压和电流而言的频率扫描的结果用于识别部件或系统的阻抗曲线的特性,如图33中所示。图33为示出用于声换能器的频率响应的曲线图。
[0208]
频率扫描可以实施为在设置时发生,和/或在所示系统的操作期间的间隔发生。在稳态操作期间,可以进行频率扫描以基于用户设置和反馈值识别用于操作的期望设定点,例如功率或频率。因此,由控制器370实施的控制方案是动态的,并且响应于系统中的变化条件,例如可能遇到频率漂移、温度变化、负载变化和任何其它系统参数变化。控制方案的动态特性允许控制器响应或补偿非线性,例如可能在部件老化或失去容差时遇到。相应地,控制方案是适应性的,并且可以适应系统变化。
[0209]
仍参照图32,系统操作的一些实施例包括对声换能器354驱动以在声学室356中产生声驻波(例如多维声驻波)。例如,可以通过驱动声换能器354来激励3d声波,该声换能器可以在其反谐振频率附近实现为压电晶体,其在本文中有时称为pzt。空腔谐振调制pzt的阻抗分布并影响其谐振模式。在3d声场的影响下,声腔356中的液体介质中的悬浮颗粒被迫成为附聚片(agglomerated sheets),然后成为附聚材料的“珠子(bead)”串。一旦颗粒浓度达到临界大小,重力就会占主导,并且附聚的材料掉落出声场并到达腔室的底部。附聚材料的浓度变化以及该材料的掉落会影响腔室的谐振,其进而会改变pzt上的声学负载及其相应的电阻抗。收集的材料的动态变化使腔和pzt失谐,从而降低了3d波在净化介质中的影响。另外,介质和腔室温度的变化也会使腔室失谐,从而降低净化效果。为了跟踪腔室中发生的谐振变化,使用控制技术来遵循pzt的电特性的变化。
[0210]
通过以其输入阻抗是复量(实量和虚量)的频率驱动pzt,可以产生强3d声场。然而,腔室动力学可能导致阻抗值以不规则的方式显著改变。阻抗的变化至少部分地归因于施加到声换能器354和/或声学室356的负载的变化。随着颗粒或次流体与初级流体或主流体分离,声换能器和/或声学室上的负载会发生变化,其进而影响声换能器和/或声学室的阻抗。
[0211]
为了校正失谐,控制器370由线路366、368上的反馈信号计算pzt阻抗,以改变操作频率从而补偿失谐。由于频率变化会影响传递到腔室356的功率,因而控制器370还确定如何调节(动态)转换器360的输出电压,以维持从rf dc
‑
ac逆变器362到声换能器354和/或声学室356的功率输出的期望量。
[0212]
转换器360(例如降压转换器)是电子可调节式dc
‑
dc电源,并且是用于逆变器362的电源。逆变器362将线路372上的dc电压转换为线路364上的高频ac信号,该信号由滤波器365滤波以产生驱动pzt 354的换能器驱动信号。腔室356中的动力学特性发生在与低音频带中的频率相对应的速率下。因此,转换器360、控制器370和dc
‑
ac逆变器362能够以比低音频带更快的速率工作,从而允许控制器跟踪腔室动态并使系统保持调谐。
[0213]
控制器370可以同时改变dc
‑
ac逆变器362的频率和出自降压转换器360的dc电压,以实时跟踪腔室动态。系统的控制带宽是逆变器的rf带宽和降压转换器的滤波系统(例如,参见图29中的滤波器318)的截止频率的函数。
[0214]
作为示例,控制器370可以实施为dsp(数字信号处理器)控制器、微控制器,微计算机等,或者实施为专用集成电路(asic)或现场可编程门阵列(fpga)控制。控制器可以用多个通道实现,以允许并行处理(例如分析)有功和/或无功阻抗、电压、电流和功率。
[0215]
腔室356的声学动态影响pzt 354的电特性,其又影响pzt显现的电压和电流。在线路366、368上反馈的感测的pzt电压和电流由控制器370处理,以计算pzt消耗的实时功率以及其瞬时阻抗(受声学动态影响)。基于用户设定点,控制器370实时地调节在线路372上向逆变器362提供的dc功率,并且对操作逆变器所处的频率进行调节以跟踪腔室动态并维持用户设定点。滤波器365(如lc或lcl等)用于阻抗匹配逆变器362的输出阻抗,以增加功率传输效率。
[0216]
控制器370足够快地对线路366、368上的反馈信号进行采样,以实时检测腔室性能的变化(例如,通过pzt阻抗的变化)。例如,控制器370可以以每秒一亿个样本对线路366、368上的反馈信号进行采样。执行信号处理技术以允许系统操作的宽动态范围,从而适应腔室动态和应用的广泛变化。dc
‑
dc转换器360可以被配置成具有快速响应时间以遵循来自控制器370的信号命令。逆变器362可以驱动宽范围的负载,这些负载需要随着时间而变化的不同量的有功功率和无功功率。用于实施图32中所示系统的电子封装件可以被配置成满足或超过针对电磁干扰(emi)的ul和ce规范。
[0217]
图34是用于向换能器354提供换能器驱动信号352的替代实施例系统380的方框图。图34的实施例与图32的实施例基本相同,主要区别在于图32的dc
‑
dc转换器360和dc
‑
ac逆变器362已被线性放大器382(图32)代替。另外,控制器384的输出将是线路386上的模拟正弦波,其被输入到线性放大器382。参照图35,控制器384可以由使用rtl(寄存器传输级)以非常高速的并行数字信号处理环路来实现,该rtl在现场可编程门阵列(fpga)内的实际数字电子电路中实现。两个高速数字比例积分(pi)环路对线路386上的正弦输出信号的频率进行调节。线性放大器382对线路386上的输出信号进行放大,并在线路388上提供放大的输出信号,使用低通滤波器365对该放大的输出信号进行滤波。来自低通滤波器365的合成电压和电流在线路366和368上反馈到控制器384。计算可以由控制器384串行执行,以产生到线性放大器382的控制信号。线性放大器可以具有由控制器384设置的可变增益。控制器384(如fpga)例如可以利用100mhz的时钟信号来操作。在实时系统中,时钟速度(例如采样速率、控制回路更新速率等)可足够快以适当地监控和适应pzt 354和/或腔室356的状况。此外,fpga的结构允许每个门部件具有与时钟速度相称的传播延迟。针对每个门部件的传播延迟可以小于一个周期,或者时钟速度为100mhz情况下例如为10ns。
[0218]
参照图35,该图示出了用于计算控制信号的并行和顺序操作。控制器384可以被配置成计算以下参数。
[0219]
vrms=sqrt(vl2+v22+...+vn2)
[0220]
irms=sqrt(il2+i22+...+in2)
[0221]
有功功率(p=v
‑
inst.x i
‑
inst对n个循环积分)
[0222]
设备功率(s=vrms x irms)
[0223]
控制器384可以被配置成通过将感测的电压和电流分解成同相和正交相位分量来计算无功功率和双极相位角。图36示出了电压和电流的同相和正交相位解调,以获得四象限相位、无功功率和电抗。使用同相和正交相位分量可以简化无功功率和相位角的计算。
[0224]
vphase angle=arctan(qv/iv)
[0225]
iphase angle=arctan(qi/ii)
[0226]
相位角=vphase
‑
iphase
[0227]
无功功率=(q=设备功率x相位角的正弦)
[0228]
控制器384可以实施以频率扫描开始的控制方案,以确定频率扫描范围内的离散频率处的系统性能参数。控制方案可以接受起始频率、频率步长和步数的输入,其定义了频率扫描范围。控制器向线性放大器382提供控制信号以调制施加到pzt 354的频率,并且pzt的电压和电流反馈给线路366、368上的控制器。控制器384的控制方案可以多次重复频率扫描,以确定具有相对高水平保证的系统特性,例如电抗。
[0229]
可以将多个电抗极小值识别为在频率扫描中获得的数据的分析结果。控制技术可以设有指定期望的电抗极小值所在的特定频率范围的输入,并且设有电阻斜率(resistance slope)(+/
‑
),其可以用来基于与期望极小电抗相对应的耐电痕性而追踪期望的操作点。电阻斜率在极小电抗附近可以是恒定的,这可提供用于跟踪技术的有用参数。通过跟踪所需频率的电阻,可以获得用于在极小电抗点下操作的鲁棒控制(robust control)。
[0230]
控制技术可以采用电阻/电抗值的导数来定位表示极大值和极小值的零斜率导数。比例
‑
积分
‑
微分(pid)控制器环路可用于跟踪电阻,以获得发生期望极小电抗的频率设定点。在一些实施中,控制可以是比例积分(pi)环路。通过以100mhz操作fpga,可以每10ns进行调节或频率校正,以补偿跟踪电阻的变化。这种类型的控制可以非常准确并且被实时实施以在存在多个变化变量(例如电抗、负载和温度)的情况下管理pzt的控制。控制技术可以设有用于电抗极小值的频率或频率设定点的误差限度,以允许控制器调节向线性放大器382的输出从而将频率保持在误差限度内。
[0231]
流体混合物,例如流体和颗粒的混合物,可以流过声学室以进行分离。流体混合物流可以通过流体泵提供,该流体泵可以对流体以及pzt和腔室施加扰动。扰动可以在感测的电压和电流幅度中产生显著的波动,表明腔室的有效阻抗随着泵扰动而波动。然而,由于控制技术的速度,通过控制方法可以几乎完全抵消波动。例如,可以在来自pzt的反馈数据中识别扰动,并且可以在来自控制器的控制输出中补偿扰动。反馈数据,例如感测的电压和电流,可用于跟踪整个声学室压力。由于换能器和/或声学室的特性随着时间的推移且随着各种环境参数(例如压力或温度)而变化,因而可以感测到变化并且控制技术可以补偿这些变化从而以期望的设定点继续操作换能器和声学室。因此,可以以非常高的准确性和精度维持期望的操作设定点,这可以引起针对系统操作的优化效率。
[0232]
fpga可以实施为独立模块,并且可以与d类驱动器耦合。可以为每个模块提供硬编码地址,以便在连接到系统时可以识别所述模块。该模块可以配置为可热插拔,以便允许系统的连续操作。模块可以针对特定系统和换能器而校准,或者可以被配置成在特定点、例如在初始化时执行校准。模块可以包括长期存储器,例如eeprom,以允许存储操作时间、健康状况、错误日志和与模块的操作相关的其它信息。该模块被配置成接受更新,从而例如可以
使用相同的设备实现新的控制技术。
[0233]
图37是包括电压源398的rf电源396的简化电路图,该电压源将线路400上的信号提供给lc匹配滤波器402,该lc匹配滤波器将线路404上的换能器驱动信号提供给超声换能器406。图38是与图36中所示的电源基本相同的rf电源408的简化电路图,除了是lcl匹配滤波器410而非图36中所示的lc滤波器402之外。
[0234]
图39是rf电源412的电路图,其将线路414上的驱动信号提供给lcl低通滤波器416,该lcl低通滤波器将线路418上的换能器驱动信号提供给超声换能器420。控制器(例如参见图32中的控制器370)向dc
‑
ac逆变器426的第一fet开关422和第二fet开关424提供互补控制信号,并且在线路414上提供合成ac驱动信号。施加到开关422、424的互补控制信号的频率由控制器控制,以便设定线路414上信号的频率。线路414上的信号被低通滤波,以衰减高频分量,并理想地在线路418上提供正弦波。图39也示出了超声换能器420的动态模型的一个示例。
[0235]
图40是lcl滤波器电路430的简化电路图,其具有提供电流感测信号i
rf
的分接头、和提供电压感测信号v
rf
的波节。信号i
rf
和v
rf
被反馈到控制器431(例如dsp),以控制线路432上施加至换能器434的换能器驱动信号(例如频率和功率)。
[0236]
图41是包括逆变器440的电源的实施例的示意图,该逆变器440从控制器(未示出)接收线路442上的开关信号以及其在线路444上的补码(complement),并且该补码用于驱动第一fet 446和第二fet448。线路450上的合成ac信号输入到lcl滤波器452,并且输出合成滤波信号以驱动换能器。滤波器452用作驱动换能器的电流源。
[0237]
可以预想到本文公开的驱动器和滤波器可用于产生平面波。
[0238]
已经参考示例性实施例描述了本发明。在阅读和理解上述详细描述时,其它人员可能会想到修改和变型。本发明旨在被解释为包括所有这些修改和变型,只要它们落入所附权利要求书或其等同物的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1