一种基于计算机视觉的全自动装移液枪头机
1.本发明涉及移液枪头技术领域,尤其涉及基于计算机视觉的全自动装移液枪头机。
背景技术:
2.移液枪是生物类实验室实验必备的工具,用于吸取和打出所需的试剂液体,因此,被称为移液枪。由于防止试剂之间互相污染,因此枪头是一次性的,这也造成了每日需要手工装填大量的枪头进入枪头盒,以备使用。
3.目前,大部分实验室采用人工装填,速度慢,会浪费大量的实验时间;一部分人会购买厂家装好枪头的无菌的枪头盒,但成本过高。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在的缺陷,而提出的基于计算机视觉的全自动装移液枪头机。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种基于计算机视觉的全自动装移液枪头机,包括机架,所述机架的一侧设有挡板,所述机架的底部设有同步带,所述同步带的一端且位于所述挡板外侧壁处设有料仓,所述料仓的内部设有枪头,所述同步带远离所述料仓的一端上方分别设有第一同步带滑轨和第二同步带滑轨,所述第二同步带滑轨的底端设有与其相配合的机械爪,所述机架内部的顶端设有摄像头。
7.进一步的,所述同步带与所述挡板之间具有间隙,且所述间隙的高度只允许一直所述枪头通过的高度。
8.进一步的,所述同步带的一侧设有枪头盒,所述枪头盒的内部设有若干用于放置枪头的开槽,每个开槽均设有单独坐标。
9.进一步的,所述第一同步带滑轨和所述第二同步带滑轨为相互垂直安装。
10.进一步的,所述第一同步带滑轨和所述第二同步带滑轨移动速度均可以调节,所述第一同步带滑轨和所述第二同步带滑轨均可至少安装一个机械爪,所述第一同步带滑轨或所述第二同步带滑轨至少安装一个。
11.进一步的,所述机架的顶部设有照明灯,所述照明灯为功率480w的led聚光灯。
12.相比于现有技术,本发明的有益效果在于:不需人工装枪头,为科研人员节省出大量的时间,其次速度可调,只需要根据需要,添加机械爪与同步带滑轨,即可增加抓取和安装的速度,计算机视觉对枪头分拣,解决大部分通过直振器等机械结构对枪头进行姿势校正,但是分拣不出轻微弯头的枪头与裂头等枪头的问题。
附图说明
13.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实
施例一起用于解释本发明,并不构成对本发明的限制。
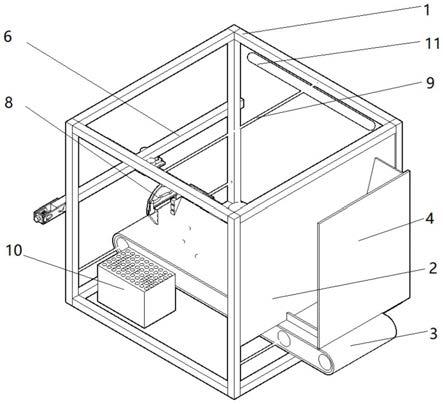
14.图1为本发明提出的基于计算机视觉的全自动装移液枪头机的整体结构示意图之一;
15.图2为本发明提出的基于计算机视觉的全自动装移液枪头机的整体结构示意图之二;
16.图3为本发明提出的基于计算机视觉的全自动装移液枪头机的整体结构示意图之三。
17.图中:1、机架;2、挡板;3、同步带;4、料仓;5、枪头;6、第一同步带滑轨;7、第二同步带滑轨;8、机械爪;9、摄像头;10、枪头盒;11、照明灯。
具体实施方式
18.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
19.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
20.实施例一
21.参照图1
‑
3,一种基于计算机视觉的全自动装移液枪头机,包括机架1,所述机架1的一侧设有挡板2,所述机架1的底部设有同步带3,所述同步带3的一端且位于所述挡板2外侧壁处设有料仓4,所述料仓4的内部设有枪头5,所述同步带3远离所述料仓4的一端上方分别设有第一同步带滑轨6和第二同步带滑轨7,所述第二同步带滑轨7的底端设有与其相配合的机械爪8,所述机架1内部的顶端设有摄像头9。
22.实施例二
23.参照图1
‑
3,在实施例一的基础上,,所述同步带3与所述挡板2之间具有间隙,且所述间隙的高度只允许一直所述枪头5通过的高度,所述同步带3的一侧设有枪头盒10,所述枪头盒10的内部设有若干用于放置枪头5的开槽,每个开槽均设有单独坐标,所述第一同步带滑轨6和所述第二同步带滑轨7为相互垂直安装,所述第一同步带滑轨6和所述第二同步带滑轨7移动速度均可以调节,所述第一同步带滑轨6和所述第二同步带滑轨7均可至少安装一个机械爪8,所述第一同步带滑轨6或所述第二同步带滑轨7至少安装一个,所述机架1的顶部设有照明灯,所述照明灯为功率480w的led聚光灯。
24.本发明的工作原理及使用流程:1、将购买的以包为单位的散装枪头5倒入料仓4。
25.2、同步带3转动,带动料仓4底部的枪头5向前,由于挡板2与同步带3之间的间隙高度影响,只允许一只枪头5的高度通过。
26.3、枪头5通过摄像头9下部区域,由摄像头9拍摄实时画面,识别系统对枪头5进行种类、是否弯曲等优劣参数进行分析。
27.4、第一同步带滑轨6控制机械爪8的左右移动,第二同步带滑轨7控制机械爪8的前后移动。根据识别系统返回的坐标,机械爪8进行抓取,并移动到枪头盒10位置,放下、装入。
28.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,
任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
技术特征:
1.一种基于计算机视觉的全自动装移液枪头机,包括机架(1),其特征在于,所述机架(1)的一侧设有挡板(2),所述机架(1)的底部设有同步带(3),所述同步带(3)的一端且位于所述挡板(2)外侧壁处设有料仓(4),所述料仓(4)的内部设有枪头(5),所述同步带(3)远离所述料仓(4)的一端上方分别设有第一同步带滑轨(6)和第二同步带滑轨(7),所述第二同步带滑轨(7)的底端设有与其相配合的机械爪(8),所述机架(1)内部的顶端设有摄像头(9)。2.根据权利要求1所述的基于计算机视觉的全自动装移液枪头机,其特征在于,所述同步带(3)与所述挡板(2)之间具有间隙,且所述间隙的高度只允许一直所述枪头(5)通过的高度。3.根据权利要求1所述的基于计算机视觉的全自动装移液枪头机,其特征在于,所述同步带(3)的一侧设有枪头盒(10),所述枪头盒(10)的内部设有若干用于放置枪头(5)的开槽,每个开槽均设有单独坐标。4.根据权利要求1所述的基于计算机视觉的全自动装移液枪头机,其特征在于,所述第一同步带滑轨(6)和所述第二同步带滑轨(7)为相互垂直安装。5.根据权利要求4所述的基于计算机视觉的全自动装移液枪头机,其特征在于,所述第一同步带滑轨(6)和所述第二同步带滑轨(7)移动速度均可以调节,所述第一同步带滑轨(6)和所述第二同步带滑轨(7)均可至少安装一个机械爪(8),所述第一同步带滑轨(6)或所述第二同步带滑轨(7)至少安装一个。6.根据权利要求1所述的基于计算机视觉的全自动装移液枪头机,其特征在于,所述机架(1)的顶部设有照明灯(11),所述照明灯(11)为功率480w的led聚光灯。
技术总结
本发明公开了一种基于计算机视觉的全自动装移液枪头机,属于移液枪头领域,包括机架,机架的一侧设有挡板,机架的底部设有同步带,同步带的一端且位于挡板外侧壁处设有料仓,料仓的内部设有枪头,同步带远离料仓的一端上方分别设有第一同步带滑轨和第二同步带滑轨,第二同步带滑轨的底端设有与其相配合的机械爪,机架内部的顶端设有摄像头。不需人工装枪头,为科研人员节省出大量的时间,其次速度可调,只需要根据需要,添加机械爪与同步带滑轨,即可增加抓取和安装的速度,计算机视觉对枪头分拣,解决大部分通过直振器等机械结构对枪头进行姿势校正,但是分拣不出轻微弯头的枪头与裂头等枪头的问题。头等枪头的问题。头等枪头的问题。
技术研发人员:潘阳阳 余震 周应聪 许瑞华 李一娟
受保护的技术使用者:甘肃农业大学
技术研发日:2021.10.12
技术公布日:2021/12/24
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1