无人机智能喷涂系统
1.本实用新型涉及无人喷涂控制领域,特别涉及一种无人机智能喷涂系统。
背景技术:
2.船舶涂装是在船舶建造工艺流程中实施船舶涂层保护的工艺过程,是现代造船三大工艺支柱之一,贯穿于整个船舶建造过程。坞内外板涂装作为整个船舶涂装的末道,是在船坞内对下水前的船舶喷涂船壳表面漆。船舶的涂装质量直接影响船舶的维修周期、航速和使用寿命,涂装作业的效率更是直接影响船舶的建造周期和成本。
3.目前基本的涂装方式有人工喷涂、爬壁机器人涂装、轨道框架机器人涂装,这些喷涂方式存在工人劳动强度大、喷涂作业效率低、复杂曲面适应性差、碾压底漆易造成划痕、搭建复杂、智能化程度低等问题。
技术实现要素:
4.实用新型目的:本实用新型的目的是提出一种无人机智能喷涂系统,解决了喷涂效率低、复杂曲面适应性差、工作人员劳动强度高、智能化程度低等问题。
5.技术方案:无人机;随动小车;y型支撑组件,可拆卸地设置于所述无人机下端;喷涂组件,可拆卸地穿设于所述y型支撑组件的中心处;输料组件,设置于所述随动小车上,所述输料组件通过输料管与所述喷涂组件连接;动态联控系统,用于控制所述无人机及所述随动小车的动力输出及管线收放;地面站,与所述无人机、所述随动小车及所述动态联控系统通讯连接,所述地面站用于数据分析处理。
6.进一步的,所述y型支撑组件包括至少两个y型支架及至少一个辅助支架,所述y型支架的上端通过单通固定座与无人机底部可拆卸连接,所述y型支架的下端分别通过斜三通固定座与无人机的起落架可拆卸连接,所述辅助支架的上端通过单通固定座与无人机底部可拆卸连接,所述y型支架的中间和所述辅助支架的下端均设有套筒,所述喷涂组件可拆卸地穿设于所述套筒内,所述套筒两端设有双通固定座。
7.进一步的,所述喷涂组件包括喷杆、喷嘴、自动喷枪及万向摄像头,所述喷嘴及所述自动喷枪分别设置于所述喷杆的两端,所述万向摄像头设置于所述喷杆接近所述喷嘴一端,所述喷杆可拆卸地穿设于y型支撑组件的中心处,所述自动喷枪通过所述输料管与所述输料组件连接,所述喷嘴可相对所述喷杆转动。
8.进一步的,所述喷涂组件还包括输料管固定装置,所述输料管固定装置可拆卸地设置于无人机起落架的横杠上,所述输料管固定装置将所述输料管垂直于无人机重心下方。
9.进一步的,所述动态联控系统包括:无人机控制器,设置于所述无人机上,用于控制所述无人机的运动;重力传感器,与所述无人机控制器电性连接,用于测量管线重力;随动小车控制器,设置于随动小车上,用于控制所述随动小车的运动;距离传感器,分别与所述无人机控制器及所述随动小车控制器电性连接,用于测量随动小车与无人机之间的相对
距离及角度;管线收放控制器,用于控制管线自动收放装置;张力传感器,与所述管线收放控制器电性连接,用于测量管线张力;其中所述无人机控制器、所述随动小车控制器及所述张力传感器之间互相通讯连接。
10.进一步的,所述重力传感器的动态响应时间小于等于1ms。
11.进一步的,所述张力传感器的动态响应时间小于等于2ms。
12.进一步的,所述动态联控系统的动态响应时间小于等于2s。
13.进一步的,所述距离传感器为红外雷达和/或超声波雷达,所述红外雷达及超声波雷达的发射端及接收端分别与所述无人机控制器及随动小车控制器电性连接。
14.有益效果:与现有技术相比,本实用新型具有如下优点:
15.1、通过无人机将喷枪抬升到空中,只需要提前设定好无人机的飞行路线,提升喷涂效率。
16.2、通过随动小车输送涂料及电力,降低无人机的负载,提升无人机的续航能力。
17.3、通过万向摄像头采集喷涂对象的信息,可以实现喷涂路径的智能规划,实现喷涂路径的最优化与喷涂覆盖区域的紧密化。
18.4、动态联控系统实现无人机与随动小车的实时联动,保证无人机和随动小车之间不会互相影响运动,保证喷涂时无人机匀速运动,提高喷涂质量。
19.5、喷头可以根据不同高度位置、不同外板形状,合理调整压力输送涂料,自适应调节送料压力,实现涂层厚度均匀。
附图说明
20.图1为本实用新型的实施例的无人机智能喷涂系统的左侧示意图;
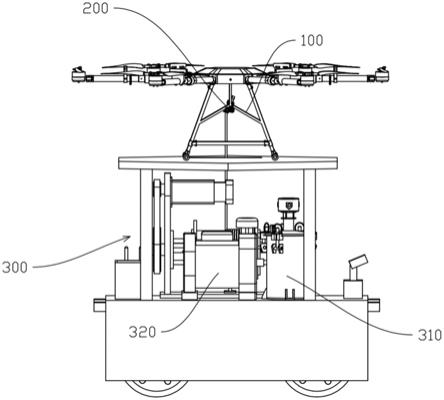
21.图2为本实用新型的实施例的无人机智能喷涂系统的右侧示意图;
22.图3为本实用新型的实施例的无人机的仰视示意图;
23.图4为本实用新型的实施例的无人机的侧视示意图;
24.图5为本实用新型的实施例的y型支撑组件的正面示意图;
25.图6为本实用新型的动态联控系统的示意图。
具体实施方式
26.下面结合附图对本实用新型的技术方案作进一步说明。
27.参照图1及图2,根据实用新型实施例的无人机智能喷涂系统,包括无人机、随动小车、y型支撑组件100、喷涂组件200、输料组件300、动态联控系统及地面站。其中y型支撑组件100可拆卸地设置于无人机的下端,喷涂组件200可拆卸地穿设于y型支撑组件100的中心处,输料组件300设置于随动小车上,输料组件300通过输料管与喷涂组件200连接。动态联控西东用于控制无人机及随动小车的动力输出及管线收放,地面站与无人机、随动小车及动态联控系统通讯连接,地面站用于数据的分析处理,建立喷涂对象的模型,并根据喷涂对象的模型规划无人机的喷涂路径。
28.根据上述技术方案的无人机智能喷涂系统,地面站分析数据规划无人机的飞行路线,无人机根据地面站规划的路线进行最优化及最精密话的喷涂,提高喷涂效率。随动小车输送涂料及电力,降低无人机的负载的同时提升无人机的续航时间。动态联控系统实现无
人机与随动小车的实时联动,保证无人机与随动小车之间保持设定的相对距离及角度,不互相影响,保证无人机喷涂过程中的的匀速运动,进而进一步地提高喷涂质量。同时各组件之间可拆卸连接,便于快速装卸,且可以分别置放保存,便于运输存放。喷涂组件200通过y型支撑组件100的多个三角形结构牢固支撑于无人机体上,保证喷涂过程中不产生震动和对无人机的相对位移,提高喷涂质量。输料组件300可以在地面上为喷涂组件200提供涂料,避免无人机喷涂用料用光往返补给造成的时间浪费,提高喷涂效率。
29.参照图2至图5,在一些实施例中,y型支撑组件100包括至少两个y型支架110及一个辅助支架130,y型支架110的一角向上通过单通固定座120与无人机底部可拆卸连接,y型支架110的另外两端分别通过两个斜三通固定座150 与无人机的起落架可拆卸连接,辅助支架130设置于两个y型支架110的中间,上端通过单通固定座120与无人机的底部可拆卸连接,辅助支架130可以分担一部分喷涂组件200的重量,进一步地提升喷涂组件200的固定的稳定性,提升喷涂质量。参照图3,y型支架110的中间和辅助支架130的下端设有套筒,喷涂组件200的喷杆210穿过套筒与y型支撑组件100可拆卸连接,套筒的两端均设有双通固定座140,双通固定座140用于防止喷涂组件200在喷射涂料的反作用力下相对无人机发生位移,造成喷涂厚度不均。
30.在一些实施例中,y型支撑组件100采用碳纤维材料制成,重量轻的同时强度高,并且耐腐蚀、耐高温及耐疲劳性能好。可以理解的是,喷杆210可以具有不同的长度规格,使用时根据喷涂场景,选择安装不同长度的喷杆210。
31.参照图1至图3,在一些实施例中,喷涂组件200包括喷杆210、喷嘴220、自动喷枪230及万向摄像头240。喷嘴220及自动喷枪230分别设置于喷杆210 的两端,万向摄像头240设置于喷杆210接近于喷嘴220的一端,自动喷枪230 通过输料管与输料组件300的涂料输送管连接。在一些实施例中,喷嘴220为可以相对喷杆在一定范围内自由转动的自适应喷嘴,自动喷枪230内设有自动阀门,自动阀门根据自动喷枪230内的压力自动开闭。万向摄像头240可以在上下左右各180度的范围的运动,万向摄像头240采集喷涂版面的信息,并反馈给控制器,控制器根据万向摄像头240采集的信息调整自适应喷嘴的参数,保持喷嘴220与喷涂的曲面分段外板保持垂直,保证喷涂厚度均匀,并保证喷距及喷幅在一个合适的范围内,进一步地提高喷涂质量。
32.在一些实施例中,喷涂组件200还包括输料管固定装置250,输料管固定装置250可拆卸地设置于无人机起落架的横杠上,输料管固定装置250将输料管垂直固定于无人机的重心下方,防止涂料重量过大导致无人机侧翻。在本实施例中,输料管固定装置250的中间处设有垂直的套筒,输料管穿过该套筒保持垂直于无人机的重心下方。
33.在一些实施例中,喷杆210的两端设有螺纹,喷嘴220及自动喷枪230通过螺纹与喷杆210连接,便于拆装更换或清洗。
34.参照图1和图2,在一些实施例中,输料组件300包括涂料仓310、加压泵 320、涂料输送管及管线自动收放装置330。其中加压泵320与涂料仓310连接,根据设定的压力值直接对涂料仓310内的涂料施加恒定的高压,使涂料在自动喷枪230内产生压力,从自适应喷嘴雾化喷出,喷涂过程中不混入空气,喷涂效率高且喷涂效果更均匀。涂料输送管的一端与自动喷枪230连接,另一端与涂料仓 310连接,涂料输送管缠绕于管线自动收放装置330上,在管线自动收放装置330 控制下收放。可以理解的是,管线自动收放装置330包括张力传感
器,用于缠绕涂料输送管的辊及用于驱动辊的电机,控制器根据张力传感器检测的涂料输送管的张力控制电机的转动及电机的转矩,使涂料输送管保持在张紧状态,保证涂料的顺畅传输。
35.参照图6,在一些实施例中,动态联控系统包括用于控制无人机运动的无人机控制器、测量管线重力的重力传感器、用于控制随动小车运动的随动小车控制器、用于测量随动小车与无人机之间的相对距离及角度的距离传感器、用于控制管线收放装置的管线收放控制器、用于测量管线张力的张力传感器。其中重力传感器与无人机控制器电性连接,张力传感器与管线收放控制器电性连接,距离传感器分别与无人机控制器及随动小车控制器电性连接。无人机控制器、随动小车控制器及张力传感器之间互相通讯连接。可以理解的是,无人机控制器、随动小车控制器及管线收放控制器可以选用dsp、单片机或者plc等可编程控制器。距离传感器可以选用红外雷达和/或超声波雷达等,红外雷达和超声波雷达的发射端及接收端分别与无人机控制器及随动小车控制器电性连接,每次运行前红外雷达和超声波雷达的发射端或接收端会在一定角度范围内转动以探测对应接收端或发射端。
36.在本实施例中,随动小车控制器选用单片机,无人机控制器和管线收放控制器均选用plc。为了无人机智能喷涂联控系统的响应时间可以满足上述无人智能喷涂联控方法,在一些实施例中,张力传感器的动态响应时间需要小于等于2ms,重力传感器的动态响应时间需要小于等于1ms,整个动态联控系统的动态响应时间要小于等于2s
37.在一些实施例中,动态联控系统采用如下联控方法实现对无人机和随动小车的联动控制,包括同时进行的垂直方向联控过程和水平方向联控过程,其中垂直方向联控过程包括如下步骤:
38.步骤100:重力传感器测量无人机负载的管线重力,张力传感器测量管线张力数值;
39.步骤110:根据管线张力数值控制管线收放装置对管线的收放,使管线保持张紧状态;
40.步骤120:根据管线重力的变化调整无人机的动力输出,使无人机保持匀速运动;
41.水平方向联控过程包括如下步骤:
42.步骤200:距离传感器测量随动小车与无人机的相对距离及角度;
43.步骤210:根据相对距离及角度调节随动小车的速度,使随动小车与无人机的距离及角度维持在预设距离及角度。
44.根据上述技术方案的联控方法,根据重力传感器测量的管线重力的变化来调节无人机的动力输出,当无人机上升或者下降时,管线重力会跟着增加或者减少,通过配合管线重力变化调节无人机的动力输出,可以保持无人机的匀速运动,进而保持无人机喷涂过程均匀。设置于随动小车上的管线收放装置根据张力传感器测量出的管线张力控制管线的收放,保持管线张力维持在合适的范围内,防止管线阻碍无人机运动。随动小车通过距离传感器测量与无人机的相对距离及角度,并适应性地调整随动小车的动力,进而调整小车速度,保持随动小车与无人机之间的相对距离及角度维持在预设值上,智能跟随无人机运动,进一步地保证管线张力的稳定。上述联控方法保证无人机在喷涂过程中无论上升还是水平移动均可以保持一个均匀的速度,保证喷涂厚度的均匀。
45.可以理解的是,无人机及随动小车的动力通过电机驱动模块对各驱动电机进行无
极调速实现。
46.在一些实施例中,步骤110中通过如下方法控制管线自动收放装置(330)对管线的收放:若管线张力数值大于预设阈值范围的最大值,则控制管线自动收放装置(330)放线;若管线张力数值小于预设阈值范围的最小值,则控制管线自动收放装置(330)收线。在本实施例中,预设阈值范围的最大值为50n,预设阈值范围的最小值为1n,在实际使用过程中,预设阈值范围可以根据管线材质等因素进行适应性调整。
47.在一些实施例中,步骤120包括如下步骤:
48.步骤121:计算重力传感器最近两次采样之间的管线重力变化值;
49.步骤122:根据管线重力变化值计算无人机的动力输出变化值,若管线重力减小则使无人机的动力输出减小动力输出变化值;若管线重力增加则使无人机的动力输出增加动力输出变化值。
50.通过上述方法,使无人机的动力与管线重力同时增减,保证无人机受力情况稳定,进而保证无人机的移动速度恒定,或者保证无人机稳定悬停,保证喷涂过程中无人机状态稳定,保证喷涂质量。
51.在一些实施例中,步骤210包括如下步骤:
52.步骤211:比较相对距离及角度与预设距离及角度,调节随动小车速度使随动小车与无人机的相对距离及角度等于预设距离及角度;
53.步骤212:使随动小车速度跟随无人机变化。
54.当距离传感器返回的随动小车与无人机的相对距离及角度不等于预设值时,先控制随动小车加速或减速,使随动小车与无人机之间的距离及角度等于预设值,再控制随动小车与无人机同速,使随动小车可以稳定地跟随无人机运动。可以理解的是,随动小车与无人机之间的距离及角度的预设值可以由人为设定,也可以由喷涂位置通过计算算法算出。随动小车可以采用pid算法或者其他自适应随动算法保持与无人机之间的固定距离及角度。
55.在一些实施例中,地面站通过如下方法规划无人机的喷涂路径:首先,喷涂无人机通过万向摄像头240对喷涂对象,如船舶外板,进行图像采集,并将采集的图片传递给地面站;然后地面站将采集到的图像进行外板三维逆向建模,并对船舶外板模型按照形状的规整程度进行划分,将船舶外板划分为平面、规则曲面以及复杂曲面;地面站再对平面、规则曲面和复杂曲面分别进行喷涂无人机飞行次数和喷涂路径规划,并生成无人机的喷涂作业参数;最后地面站将喷涂路径及喷涂作业参数发送给无人机和随动小车的控制器,无人机根据喷涂路径控制无人机运动及控制喷嘴220的工作,完成喷涂任务。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1