高精密自动调高高速点胶机的制作方法
1.本实用新型涉及点胶机领域,特别涉及一种高精密自动调高高速点胶机。
背景技术:
2.点胶工艺广泛应用于3c、汽车电子、医疗等领域,而点胶的品质直接影响产品的后续工艺。现行业内的点胶机主要是应用于表面平整的产品,而越来越多的产品存在不规则的凹凸面或曲面,对此类产品点胶时,由于点胶需要与产品表面保持稳定的距离才能达到点胶的最佳效果,而现有点胶机是按照预先设定点胶高度进行点胶的,因此,当遇到不规则的凹凸面或曲面时,高度无法随着凹凸面或曲面变化,导致点胶阀不能与点胶表面保持相对距离,影响点胶的效果,甚至有触碰撞机的风险。故需要提供一种高精密自动调高高速点胶机来解决上述技术问题。
技术实现要素:
3.本实用新型提供一种高精密自动调高高速点胶机,以解决现有技术中的点胶机是按照预先设定点胶高度进行点胶的,点胶阀不能与点胶表面保持相对距离,影响点胶的效果,甚至有触碰撞机的风险的问题。
4.为解决上述技术问题,本实用新型的技术方案为:一种高精密自动调高高速点胶机,其包括:
5.设备机架;
6.产品放置平台,连接在所述设备机架上,用于放置待点胶的产品;
7.y轴纵向运动机构,连接在所述设备机架上,位于所述产品放置平台上方,用于纵向移动;
8.x轴横向运动机构,连接在所述y轴纵向运动机构上,用于横向移动;
9.z轴竖向运动机构,连接在所述x轴横向运动机构上,用于竖向移动;
10.u轴旋转运动机构,连接在所述z轴竖向运动机构上,用于旋转;
11.点胶执行机构,用于点胶,连接在所述u轴旋转运动机构上,包括激光位移传感器,所述激光位移传感器用于探测所述产品放置平台上的产品高度方便设备及时调整。
12.本实用新型所述的高精密自动调高高速点胶机中,所述点胶执行机构包括:
13.点胶支架,连接在所述u轴旋转运动机构上,所述激光位移传感器连接在所述点胶支架上;
14.点胶定位组件,连接在所述点胶支架上,用于点胶时定位;
15.点胶阀,连接在所述点胶支架上,位于所述点胶定位组件一端,用于点胶。
16.本实用新型所述的高精密自动调高高速点胶机中,所述点胶定位组件包括:
17.相机支架,连接在所述点胶支架上;
18.ccd工业相机,连接在所述相机支架上,用于拍照;
19.定焦镜头,连接在所述ccd工业相机下端,用于定焦;
20.光源支架,连接在所述点胶支架上,位于所述相机支架下方,与点胶支架连接处设置有长槽孔;
21.同轴光源,连接在所述光源支架上,且位于所述定焦镜头下方,用于照亮产品上的位置识别点。
22.本实用新型所述的高精密自动调高高速点胶机中,所述y轴纵向运动机构上设置有纵向限位块,所述纵向限位块上设置有纵向限位凸起,两个纵向限位块分别位于所述x轴横向运动机构两侧,用于限制x轴横向运动机构的运动范围;
23.所述x轴横向运动机构上设置有横向限位块,所述横向限位块上设置有横向限位凸起,两个横向限位块分别位于所述z轴竖向运动机构两侧,用于限制z轴竖向运动机构的运动范围。
24.本实用新型所述的高精密自动调高高速点胶机中,所述纵向限位块上设置有纵向到位感应器,所述x轴横向运动机构对应所述纵向到位感应器位置设置有纵向到位感应板,所述纵向到位感应板和纵向到位感应器用于确定纵向移动原点和最远点;
25.所述横向限位块上设置有横向到位感应器,所述z轴竖向运动机构对应所述横向到位感应器位置设置有横向到位感应板,所述横向到位感应板和横向到位感应器用于确定横向移动原点和最远点。
26.本实用新型所述的高精密自动调高高速点胶机中,所述y轴纵向运动机构包括:
27.纵向移动导轨,连接在所述设备机架上;
28.纵向移动滑座,连接在所述纵向移动导轨上,用于沿所述纵向移动导轨移动;
29.纵向驱动电机,设置在所述设备支架上;
30.纵向驱动螺杆,连接所述纵向驱动电机,所述纵向驱动螺杆的轴线方向和所述纵向移动导轨的导向方向一致;
31.纵向驱动螺母,套设在所述纵向驱动螺杆上。
32.本实用新型所述的高精密自动调高高速点胶机中,所述x轴横向运动机构包括:
33.横向移动支架,连接所述纵向移动滑座和所述纵向驱动螺母;
34.横向移动导轨,连接在所述横向移动支架上;
35.横向移动滑座,连接在所述横向移动导轨上,用于沿所述横向移动导轨移动;
36.横向驱动电机,设置在所述横向移动支架上;
37.横向驱动螺杆,连接所述横向驱动电机,所述横向驱动螺杆的轴线方向和所述横向移动导轨的导向方向一致;
38.横向驱动螺母,套设在所述横向驱动螺杆上。
39.本实用新型所述的高精密自动调高高速点胶机中,所述z轴竖向运动机构包括:
40.竖向移动支架,连接所述横向移动滑座和横向驱动螺母;
41.竖向移动导轨,连接在所述竖向移动支架上;
42.竖向移动滑座,连接在所述竖向移动导轨上,用于沿所述竖向移动导轨移动;
43.竖向驱动电机,连接在所述竖向移动支架上;
44.竖向驱动螺杆,连接所述竖向驱动电机,所述竖向驱动螺杆的轴线方向和所述竖向移动导轨的导向方向一致;
45.竖向驱动螺母,套设在所述竖向驱动螺杆上。
46.本实用新型所述的高精密自动调高高速点胶机中,所述u轴旋转运动机构包括:
47.旋转运动支架,连接所述竖向移动滑座和竖向驱动螺母;
48.旋转运动电机,连接在所述旋转运动支架上;
49.旋转运动减速机,连接所述旋转运动电机和所述点胶执行机构。
50.本实用新型所述的高精密自动调高高速点胶机中,所述y轴纵向运动机构包括纵向运动直线电机,所述纵向运动直线电机连接在所述设备机架上,用于带动所述x轴横向运动机构移动;
51.所述x轴横向运动机构包括横向运动直线电机,所述横向运动直线电机连接在所述纵向运动直线电机上,用于带动所述z轴竖向运动机构移动。
52.本实用新型相较于现有技术,其有益效果为:本实用新型的高精密自动调高高速点胶机使用激光位移传感器探测产品高度,自动调整点胶执行机构与产品的距离,解决了对凹凸面或曲面产品点胶时点胶阀高度无法变化的问题,保证了点胶的效果,也可以有效避免触碰撞机的危险。
附图说明
53.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面对实施例中所需要使用的附图作简单的介绍,下面描述中的附图仅为本实用新型的部分实施例相应的附图。
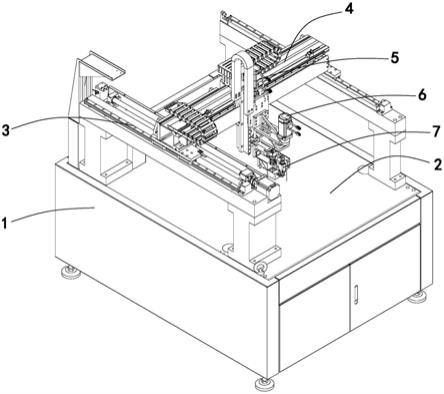
54.图1为本实用新型的高精密自动调高高速点胶机的结构示意图。
55.图2为本实用新型的高精密自动调高高速点胶机的y轴纵向运动机构、x轴横向运动机构和z轴竖向运动机构的结构示意图。
56.图3为本实用新型的高精密自动调高高速点胶机的u轴旋转运动结构和点胶执行机构的结构示意图。
57.其中,1、设备机架,2、产品放置平台,3、y轴纵向运动机构,4、x轴横向运动机构,5、z轴竖向运动机构,6、u轴旋转运动机构,7、点胶执行机构,31、纵向限位块,32、纵向移动导轨,33、纵向移动滑座,34、纵向驱动电机,35、纵向驱动螺杆,41、横向限位块,42、纵向到位感应板,43、横向移动支架,44、横向移动导轨,45、横向驱动电机,51、横向到位感应板,52、竖向移动支架,53、竖向移动导轨,54、竖向驱动电机,55、竖向驱动螺杆,61、旋转运动支架,62、旋转运动电机,63、旋转运动减速机,71、激光位移传感器,72、点胶支架,74、点胶阀,311、纵向限位凸起,312、纵向到位感应器,411、横向限位凸起,412、横向到位感应器,731、相机支架,732、ccd工业相机,733、定焦镜头,734、光源支架,735、同轴光源。
具体实施方式
58.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
59.本实用新型中所提到的方向用语,例如「上」、「下」、「前」、「后」、「左」、「右」、「内」、「外」、「侧面」、「顶部」以及「底部」等词,仅是参考附图的方位,使用的方向用语是用以说明及
理解本实用新型,而非用以限制本实用新型。
60.本实用新型术语中的“第一”“第二”等词仅作为描述目的,而不能理解为指示或暗示相对的重要性,以及不作为对先后顺序的限制。
61.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
62.现有技术中的点胶机是按照预先设定点胶高度进行点胶的,点胶阀不能与点胶表面保持相对距离,影响点胶的效果,甚至有触碰撞机的风险。
63.如下为本实用新型提供的一种能解决以上技术问题的高精密自动调高高速点胶机的优选实施例。
64.请参照图1、图2和图3,其中图1为本实用新型的高精密自动调高高速点胶机的结构示意图,图2为本实用新型的高精密自动调高高速点胶机的y轴纵向运动机构、x轴横向运动机构和z轴竖向运动机构的结构示意图,图3为本实用新型的高精密自动调高高速点胶机的u轴旋转运动结构和点胶执行机构的结构示意图。
65.在图中,结构相似的单元是以相同标号表示。
66.本实用新型提供一种高精密自动调高高速点胶机,其包括设备机架1、产品放置平台2、y轴纵向运动机构3、x轴横向运动机构4、z轴竖向运动机构5、u轴旋转运动机构6和点胶执行机构7。设备机架1呈长方体框架结构,下端设置有支撑脚杯,侧面设置有封板和活动门;产品放置平台2连接在设备机架1上,用于放置待点胶的产品,产品放置平台2为打磨光滑平整的大理石平台,水平放置在设备机架1上。
67.y轴纵向运动机构3连接在设备机架1上,位于产品放置平台2上方,用于带动x轴运动机构沿纵向移动;y轴纵向运动机构3包括纵向移动导轨32、纵向移动滑座33、纵向驱动电机34、纵向驱动螺杆35和纵向驱动螺母,纵向移动导轨32连接在设备机架1上;纵向移动滑座33连接在纵向移动导轨32上,用于沿纵向移动导轨32移动;纵向驱动电机34设置在设备支架上,纵向驱动螺杆35连接纵向驱动电机34,纵向驱动螺杆35的轴线方向和纵向移动导轨32的导向方向一致,纵向驱动螺母套设在纵向驱动螺杆35上。x轴横向运动机构4连接纵向移动滑座33和纵向驱动螺母,当纵向驱动电机34转动,带动纵向驱动螺杆35转动,套设在纵向驱动螺杆35上的纵向驱动螺母带动x轴横向运动机构4沿纵向驱动螺杆35轴线方向移动,设置纵向移动导轨32和纵向移动滑座33,保障x轴横向运动机构4运动更加稳定。y轴纵向运动机构3还可以使用纵向运动直线电机代替纵向驱动电机34作为驱动力,将纵向运动直线电机连接在设备机架1上,驱动x轴横向运动机构4移动。
68.y轴纵向运动机构3上设置有纵向限位块31,纵向限位块31上设置有纵向限位凸起311,两个纵向限位块31分别位于x轴横向运动机构4两侧,用于限制x轴横向运动机构4的运动范围,避免撞机造成不必要的损害;纵向限位块31上设置有纵向到位感应器312,x轴横向运动机构4对应纵向到位感应器312位置设置有纵向到位感应板42,纵向到位感应板42和纵向到位感应器312用于确定纵向移动原点和最远点,方便后台系统计算点胶轨迹控制点胶阀74的移动。
69.x轴横向运动机构4连接在y轴纵向运动机构3上,用于带动z轴竖向运动机构5沿横向移动;x轴横向运动机构4包括横向移动支架43、横向移动导轨44、横向移动滑座、横向驱动电机45、横向驱动螺杆和横向驱动螺母;横向移动支架43连接纵向移动滑座33和纵向驱动螺母;横向移动导轨44连接在横向移动支架43上,横向移动滑座连接在横向移动导轨44上,用于沿横向移动导轨44移动;横向驱动电机45设置在横向移动支架43上,横向驱动螺杆连接横向驱动电机45,横向驱动螺杆的轴线方向和横向移动导轨44的导向方向一致;横向驱动螺母套设在横向驱动螺杆上。z轴竖向运动机构5连接横向移动滑座和横向驱动螺母。当横向驱动电机45转动,带动横向驱动螺杆转动,套设在横向驱动螺杆上的横向驱动螺母带动z轴竖向运动机构5沿横向驱动螺杆轴线方向移动,设置横向移动导轨44和横向移动滑座,保障z轴竖向运动机构5运动更加稳定。x轴横向运动机构4还可以使用横向运动直线电机代替横向驱动电机45作为驱动力,将横向运动直线电机连接在纵向运动直线电机上,带动z轴竖向运动机构5移动。
70.x轴横向运动机构4上设置有横向限位块41,横向限位块41上设置有横向限位凸起411,两个横向限位块41分别位于z轴竖向运动机构5两侧,用于限制z轴竖向运动机构5的运动范围。横向限位块41上设置有横向到位感应器412,z轴竖向运动机构5对应横向到位感应器412位置设置有横向到位感应板51,横向到位感应板51和横向到位感应器412用于确定横向移动原点和最远点,方便后台系统计算点胶轨迹。
71.z轴竖向运动机构5连接在x轴横向运动机构4上,用于带动u轴旋转运动机构6沿竖向移动;z轴竖向运动机构5包括竖向移动支架52、竖向移动导轨53、竖向移动滑座、竖向驱动电机54、竖向驱动螺杆55和竖向驱动螺母;竖向移动支架52连接横向移动滑座和横向驱动螺母;竖向移动导轨53连接在竖向移动支架52上,竖向移动滑座连接在竖向移动导轨53上,用于沿竖向移动导轨53移动;竖向驱动电机54连接在竖向移动支架52上,竖向驱动螺杆55连接竖向驱动电机54,竖向驱动螺杆55的轴线方向和竖向移动导轨53的导向方向一致;竖向驱动螺母套设在竖向驱动螺杆55上。u轴旋转运动机构6连接竖向移动滑座和竖向驱动螺母。当竖向驱动电机54转动,带动竖向驱动螺杆55转动,套设在竖向驱动螺杆55上的竖向驱动螺母带动u轴旋转运动机构6沿竖向驱动螺杆55轴线方向移动,设置竖向移动导轨53和竖向移动滑座,保障u轴旋转运动机构6运动更加稳定。
72.u轴旋转运动机构6连接在z轴竖向运动机构5上,用于带动点胶执行机构7旋转;u轴旋转运动机构6包括旋转运动支架61、旋转运动电机62和旋转运动减速机63,旋转运动支架61连接竖向移动滑座和竖向驱动螺母;旋转运动电机62连接在旋转运动支架61上,旋转运动减速机63连接旋转运动电机62和点胶执行机构7。旋转运动减速机63输入端连接旋转运动电机62的输出端,旋转运动减速机63输出端连接点胶支架72。使用旋转运动减速机63传动,保障点胶执行机构7转动更加平稳,保障点胶执行机构7转动轨迹的精度更强。
73.点胶执行机构7用于点胶,连接在u轴旋转运动机构6上,包括激光位移传感器71,激光位移传感器71用于探测产品放置平台2上的产品高度方便设备及时调整。点胶执行机构7包括点胶支架72、点胶定位组件和点胶阀74。点胶支架72连接在u轴旋转运动机构6上,激光位移传感器71连接在点胶支架72上;点胶定位组件连接在点胶支架72上,用于点胶时定位;点胶阀74连接在点胶支架72上,位于点胶定位组件一端,用于点胶。点胶定位组件、激光位移传感器71和点胶阀74绑定在一块,运动同步,方便后台系统计算点胶阀74的运动轨
迹。
74.点胶定位组件包括相机支架731、ccd工业相机732、定焦镜头733、光源支架734和同轴光源735,相机支架731连接在点胶支架72上,ccd工业相机732连接在相机支架731上,用于拍照,定焦镜头733连接在ccd工业相机732下端,用于定焦;光源支架734连接在点胶支架72上,位于相机支架731下方,与点胶支架72连接处设置有长槽孔,同轴光源735连接在光源支架734上,且位于定焦镜头733下方,用于照亮产品上的位置识别点。采用ccd工业相机732及定焦镜头733采集图像自动计算定位纠偏,保证了点胶的精度。
75.本实用新型的工作原理:产品置于产品放置平台2上,软件启动后,z轴竖向运动机构5抬升至安全高度,u轴旋转运动机构6旋转至与产品平齐的角度,x轴横向运动机构4及y轴纵向运动机构3按照预先教导xy坐标把ccd工业相机732移动至产品上方,通过同轴光源735照亮产品mark点,ccd工业相机732及定焦镜头733拍照成像并计算偏差值,x轴横向运动机构4及y轴纵向运动机构3把点胶阀74移动至点胶位置上方,激光位移传感器71探测产品高度,z轴竖向运动机构5下降至点胶高度,x轴横向运动机构4及y轴纵向运动机构3开始按照点胶轨迹移动,激光位移传感器71实时探测产品高度,z轴竖向运动机构5按照产品高度实时调整点胶的高度,同时点胶阀74开启把胶水喷射到产品上。
76.点胶完成后,z轴竖向运动机构5抬升至安全高度,x轴横向运动机构4及y轴纵向运动机构3运动至等待位置,等待人工将产品取出。
77.这样即完成了本优选实施例的高精密自动调高高速点胶机的工作过程。
78.综上所述,虽然本实用新型已以优选实施例揭露如上,但上述优选实施例并非用以限制本实用新型,本领域的普通技术人员,在不脱离本实用新型的精神和范围内,均可作各种更动与润饰,因此本实用新型的保护范围以权利要求界定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1