一种玻璃管在线破碎机自动启动装置的制作方法
1.本实用新型涉及玻璃加工的技术领域,尤其涉及一种玻璃管在线破碎机自动启动装置。
背景技术:
2.玻璃管是非金属管的一类英文,是以氧化钠(na2o)、氧化硼(b2o3)、二氧化硅(sio2)为基本成分的一种玻璃。它的良好性能已得到世界各界的广泛认可,与普通玻璃相比,无毒副作用,其机械性能,热稳定性能,抗水、抗碱、抗酸等性质大大提高,可广泛用于化工、航天、军事、家庭、医院等各个领域,具有良好的推广价值和社会效益,该种玻璃在我国出现是基础材料工业的又一次新革命。
3.在玻璃管制造工厂中,一般原料经过熔制后会被运输到拉管机中,拉管机利用熔制的玻璃原料连续制得管状玻璃,管状玻璃经过初步冷却后,被运输至切割机处,切割机将连续的管状玻璃切割成一段一段等长度的玻璃管,然后玻璃管被专用的传送装置运输到下一个加工点;但由于操作人员的失误或切割时间较短,经常会出现切割失败的情况,从而导致传送装置上经常会出现两倍长度的玻璃管,为了不影响下一个加工点的加工任务,保证玻璃管加工生产线的流畅运行,一般需要将两倍长度的玻璃管送入在线破碎机进行破碎处理,将碎玻璃再回收加工,避免资源浪费。
4.目前玻璃加工厂采用的方式是将在线破碎机设置在传送装置的开始端的位置,在线破碎机的入料口朝向传送装置,传送装置的运输方向与在线破碎机的入料口方向垂直,玻璃管的切割点与在线破碎机的入料口相对,这样一旦有未切割好的两倍长度的玻璃管就会在被运输到传送装置的同时伸进在线破碎机的入料口,工作人员发现有玻璃管伸入在线破碎机的入料口时,启动在线破碎机并同时使用工具将玻璃管推入在线破碎机中完成破碎任务。这种方式需要人工监测来启停在线破碎机,并需要人工将玻璃管推入在线破碎机中,人工劳动强度大,且容易出现遗漏。
技术实现要素:
5.针对现有技术存在的上述问题,本实用新型的要解决的技术问题是:对切割失败的玻璃管进行破碎处理时,存在人工劳动强度大的问题。
6.为解决上述技术问题,本实用新型采用如下技术方案:一种玻璃管在线破碎机自动启动装置,包括安装壳、检测结构和引导结构。
7.所述安装壳为具有腔体的矩形体结构,安装壳的一面开口,所述安装壳固定设置在在线破碎机具有入料口的侧面,安装壳开口的一面朝向在线破碎机的入料口,所述安装壳远离在线破碎机的侧面设有通孔,所述通孔与线破碎机的入料口共轴线。
8.所述检测结构包括距离传感器,所述距离传感器器固定设置在安装壳远离在线破碎机的内壁上,距离传感器的检测端朝向通孔,且距离传感器的轴线与通孔轴线垂直。
9.所述引导结构包括两个传送带和两个第一气缸。所述两个传送带均横向位于安装
壳内,两个传送带分别位于通孔轴线的上下两侧,两个传送带在竖直方向上相对。
10.所述两个第一气缸分别位于安装壳内靠近上下两侧的位置,第一气缸的伸缩端均竖直朝向相近的传送带,第一气缸与相近的安装壳内壁固定连接。
11.所述每个第一气缸与对应传送带之间设有连接架,所述连接架分别与对应传送带外壳和对应第一气缸的伸缩端固定连接。
12.通过在在线破碎机具有入料口的侧面设置安装壳,用于安装检测结构和引导结构,当玻璃管从安装壳的通孔伸入安装壳内时,距离传感器发出的测距信号被玻璃管阻挡,测得距离发生变化,此时在线破碎机启动,同时传送带启动且两个第一气缸的伸缩端伸出,带动两个传送带向玻璃管靠拢,然后两个传送带将玻璃管夹住,在传送带的带动下,玻璃管被引导从入料口进入在线破碎机进行破碎处理。整个玻璃管破碎过程不需要人工监测和操作,大大降低了人工劳动强度。
13.作为优选,所述安装壳外远离在线破碎机的一侧设有导入斗,所述导入斗为漏斗状结构,导入斗与通孔共轴线,导入斗端面直径小的一端与安装壳固定连接。
14.由于需要破碎的玻璃管的长度是正常玻璃管的两倍,当玻璃管伸向安装壳的通孔时可能存在倾斜或偏向,通过设置漏斗状的导入斗,导入斗的弧形内壁对玻璃管有导向作用,并矫正玻璃管的方向,从而引导玻璃管顺利从安装壳的通孔进入。
15.作为优选,所述一种玻璃管在线破碎机自动启动装置还包括防偏摆结构。
16.所述防偏摆结构设置在在线破碎机具有入料口的侧面,防偏摆结构包括四个防偏摆单元,所述四个防偏摆单元分别位于导入斗的上下左右四侧。
17.所述每个防偏摆单元均包括支撑板、第二气缸和导板,所述支撑板的长度方向与通孔轴线平行,支撑板的一端与在线破碎机固定连接,所述第二气缸固定设置在支撑板另一端靠近通孔轴线的一侧,第二气缸的伸缩端竖直朝向通孔轴线,所述导板与第二气缸的伸缩端固定连接,所述导板位于导入斗远离在线破碎机的一侧。
18.由于需要破碎的玻璃管较长,当玻璃管的一端进入安装壳后,玻璃管被引导结构引导进入在线破碎机,而另一端由于脱离传送装置而缺少限制,所以在引导结构引导玻璃管进入在线破碎机时玻璃管很可能出现左右偏摆的情况,轻则玻璃管与周围物体或导入斗发生碰撞碎裂,重则出现安全事故。通过设置防偏摆结构,当距离传感器检测到玻璃管进入安装壳后,四个第二气缸的伸缩端同时伸出,带动导板向玻璃管靠拢,进而限制玻璃管摆动,避免玻璃管发生大幅度偏摆造成玻璃管提前碎裂。
19.作为优选,所述导板为弧形板结构,导板的弧面朝向通孔轴线,四个导板靠近可形成一个完整的圆环。
20.通过将导板设置成弧形结构,当晃动中的玻璃管与导板接触时,弧形结构更容易引导玻璃管恢复正确方向,同时四个导板最终接触形成一个圆管状结构,可以最大程度限制玻璃管的摆动。
21.作为优选,所述导板的内圆面设有缓冲海绵垫。通过设置缓冲海绵垫,可以避免玻璃管在摆动时与导板发生剧烈碰撞而碎裂,提升了防偏摆结构的实用性。
22.作为优选,所述传送带皮带的运输面设有防滑垫。通过设置防滑垫,可以有效避免玻璃管与传送带皮带之间出现打滑的现象,影响玻璃管顺利进入在线破碎机。
23.相对于现有技术,本实用新型至少具有如下优点:
24.1.本实用新型中,通过在在线破碎机具有入料口的侧面设置安装壳,用于安装检测结构和引导结构,当玻璃管从安装壳的通孔伸入安装壳内时,距离传感器发出的测距信号被玻璃管阻挡,测得距离发生变化,此时在线破碎机启动,同时传送带启动且两个第一气缸的伸缩端伸出,带动两个传送带向玻璃管靠拢,然后两个传送带将玻璃管夹住,在传送带的带动下,玻璃管被引导从入料口进入在线破碎机进行破碎处理。整个玻璃管破碎过程不需要人工监测和操作,大大降低了人工劳动强度。
25.2.本实用新型中,由于需要破碎的玻璃管的长度是正常玻璃管的两倍,当玻璃管伸向安装壳的通孔时可能存在倾斜或偏向,通过设置漏斗状的导入斗,导入斗的弧形内壁对玻璃管有导向作用,并矫正玻璃管的方向,从而引导玻璃管顺利从安装壳的通孔进入。
26.3.本实用新型中,由于需要破碎的玻璃管较长,当玻璃管的一端进入安装壳后,玻璃管被引导结构引导进入在线破碎机,而另一端由于脱离传送装置而缺少限制,所以在引导结构引导玻璃管进入在线破碎机时玻璃管很可能出现左右偏摆的情况,轻则玻璃管与周围物体或导入斗发生碰撞碎裂,重则出现安全事故。通过设置防偏摆结构,当距离传感器检测到玻璃管进入安装壳后,四个第二气缸的伸缩端同时伸出,带动导板向玻璃管靠拢,进而限制玻璃管摆动,避免玻璃管发生大幅度偏摆造成玻璃管提前碎裂。
附图说明
27.图1为本实用新型的整体结构的主视图。
28.图2为本实用新型的整体结构的右视图。
29.图3为图2中a处的放大剖视示意图。
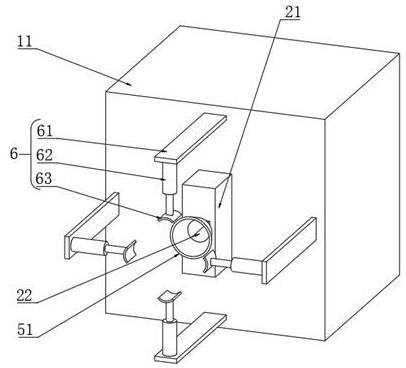
30.图4为本实用新型的整体结构的立体图。
31.图5为本实用新型使用状态的示意图。
32.图中,11-在线破碎机,12-入料口,13-传送装置,14-玻璃管,21-安装壳,22-通孔,31-距离传感器,41-传送带,42-第一气缸,43-连接架,51-导入斗,6-防偏摆单元,61-支撑板,62-第二气缸,63-导板。
具体实施方式
33.下面结合附图对本实用新型作进一步详细说明。
34.为了方便描述,本实用新型撰写中引入了以下描述概念:
35.本实用新型中
‘
前’、
‘
后’、
‘
左’、
‘
右’、
‘
上’、
‘
下’均指在图1中的方位,其中
‘
前’是指在图1中相对于纸面朝外,
‘
后’是指在图1中相对于纸面朝里。在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“套设/接”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
36.参见图1-5,本实用新型提供的一种实施例:
37.实施例1:一种玻璃管在线破碎机自动启动装置,包括安装壳21、检测结构和引导结构。
38.所述安装壳21为具有腔体的矩形体结构,安装壳21的一面开口,所述安装壳21固定设置在在线破碎机11具有入料口12的侧面,安装壳21开口的一面朝向在线破碎机11的入料口12,所述安装壳21远离在线破碎机11的侧面设有通孔22,所述通孔22与线破碎机的入料口12共轴线。
39.所述检测结构包括距离传感器31,所述距离传感器31器固定设置在安装壳21远离在线破碎机11的内壁上,距离传感器31的检测端朝向通孔22,且距离传感器31的轴线与通孔22轴线垂直。
40.具体实施时,为了保证检测结构能够准确检测到玻璃管14进入安装壳21,所述距离传感器31为多个,多个距离传感器31分别位于通孔的上下两侧,且多个距离传感器31交错设置,确保整个通孔22的的区域均被检测结构检测。
41.所述引导结构包括两个传送带41和两个第一气缸42。所述两个传送带41均横向位于安装壳21内,两个传送带41分别位于通孔22轴线的上下两侧,两个传送带41在竖直方向上相对。
42.所述两个第一气缸42分别位于安装壳21内靠近上下两侧的位置,第一气缸42的伸缩端均竖直朝向相近的传送带41,第一气缸42与相近的安装壳21内壁固定连接。
43.所述每个第一气缸42与对应传送带41之间设有连接架43,所述连接架43分别与对应传送带41外壳和对应第一气缸42的伸缩端固定连接。
44.进一步地,所述安装壳21外远离在线破碎机11的一侧设有导入斗51,所述导入斗51为漏斗状结构,导入斗51与通孔22共轴线,导入斗51端面直径小的一端与安装壳21固定连接。
45.进一步地,所述一种玻璃管在线破碎机自动启动装置还包括防偏摆结构。
46.所述防偏摆结构设置在在线破碎机11具有入料口12的侧面,防偏摆结构包括四个防偏摆单元6,所述四个防偏摆单元6分别位于导入斗51的上下左右四侧。
47.所述每个防偏摆单元6均包括支撑板61、第二气缸62和导板63,所述支撑板61的长度方向与通孔22轴线平行,支撑板61的一端与在线破碎机11固定连接,所述第二气缸62固定设置在支撑板61另一端靠近通孔22轴线的一侧,第二气缸62的伸缩端竖直朝向通孔22轴线,所述导板63与第二气缸62的伸缩端固定连接,所述导板63位于导入斗51远离在线破碎机11的一侧。
48.进一步地,所述导板63为弧形板结构,导板63的弧面朝向通孔22轴线,四个导板63靠近可形成一个完整的圆环。
49.进一步地,所述导板63的内圆面设有缓冲海绵垫。
50.进一步地,所述传送带41皮带的运输面设有防滑垫。
51.本实用新型限定的一种玻璃管在线破碎机自动启动装置的工作原理如下:
52.安装布局:将在线破碎机13和玻璃管14的切割点分别设置在传送装置13的两侧,在线破碎机13和玻璃管14的切割点均位于传送装置13的开始端的位置,玻璃管14的切割点的出料方向和在线破碎机13的入料口12的方向均与传送装置13的运输方向垂直,且玻璃管14的切割点与在线破碎机11的入料口12相对,未切割成功的玻璃管14从玻璃管14的切割点出来后位于传送装置13上,且玻璃管14末端可以伸入安装壳21的通孔22中。
53.引导:当玻璃管14一端从通孔22进入安装壳21后,距离传感器31检测的距离发生
变化,此时在线破碎机11启动,同时两个传送带41启动,两个第一气缸42的伸缩端伸出,第一气缸42的伸缩端通过连接架43带动两个传送带41向玻璃管14靠拢,最终两个传送带41将玻璃管14夹住,然后将玻璃管14带动从入料口12进入在线破碎机11进行破碎处理。
54.防偏摆:当距离传感器31检测到玻璃管14进入安装壳21内时,四个第二气缸62的伸缩端伸出,第二气缸62的伸缩端带动与之固定连接的导板63向通孔22轴线靠拢,将玻璃管14限制在一定范围内,避免玻璃管14在不断被引导结构引导进入在线破碎机11时出现大幅度摆动,从而避免玻璃管14在未进入在线破碎机11前就碎裂。
55.检测结构负责检查玻璃管14是否进入安装壳21,引导结构负责引导玻璃管14进入在线破碎机11,防偏摆结构负责避免玻璃管14在进入在线破碎机11前因大幅度摆动而碰撞破碎,整个玻璃管14破碎过程不需要人工监督和操作,大大降低了人工劳动强度。
56.最后说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的宗旨和范围,其均应涵盖在本实用新型的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1