一种弹簧外圈弧面点漆装置的制作方法
1.本实用新型涉及弹簧生产技术领域,尤其是涉及一种弹簧外圈弧面点漆装置。
背景技术:
2.弹簧在现在各种机械设备中应用的十分广泛,其属于一种利用弹性来工作的机械零件。用弹性材料制成的零件在外力作用下发生形变,外力消失后将恢复原状,一般采用弹簧钢制成。弹簧的种类复杂多样,主要有螺旋弹簧、涡卷弹簧、板弹簧、异型弹簧等。在汽车生产制造过程中装配弹簧时,对弹簧的疏密端有方向性和一致性的要求。点漆的目的,用于装配过程中的快速识别,以保证产品质量并提高工作效率。目前弹簧点漆主要是人工点漆,人工涂漆方式费时费力,且涂层厚度不均匀、漆点位置偏差较大,表面质量不稳定。
技术实现要素:
3.有鉴于此,本实用新型的目的在于提供一种弹簧外圈弧面点漆装置,可对弹簧实现全自动的点漆。
4.为实现上述目的,本实用新型采用以下内容:
5.一种弹簧外圈弧面点漆装置,包括:
6.移印固定座,其上阵列有若干移印胶头;
7.精定位移动机构,可带动移印固定座在x、y、z方向进行移动;
8.移印钢板,处于移印固定座下方,其表面具有凹痕;
9.油蛊组,通过一移动伺服机构于移印钢板的上方左右移动,以使油蛊组内的油漆将移印钢板表面上的凹痕填满;
10.清除机构,设于移印固定座下方,以对移印胶头表面上的油漆进行清理。
11.优选的是,所述转动轴的轴心与传动轴的轴心位于同一直线且此直线与所述底座平行。
12.优选的是,所述精定位移动机构包括支撑架组,其上具有一y轴机器人,所述y轴机器人上滑动安装有一x轴机器人,所述x轴机器人上滑动安装有一z轴升降伺服机构,所述z轴升降伺服机构连接移印固定座。
13.优选的是,所述支撑架组包括左右间隔平行设置的一对侧撑架;所述y轴机器人布置于其中一个侧撑架上,另一个侧撑架上安装有与所述y轴机器人相平行的滑轨,所述x轴机器人的一端通过一移动块滑动安装于所述滑轨上。
14.优选的是,所述两个侧撑架之间布置有一基台,所述移印钢板与移动伺服机构呈前后设置于基台上;油蛊组滑动安装于移动伺服机构上,且在移动过程中经过移印钢板上的凹痕。
15.优选的是,所述清除机构包括相向设于基台左右两侧的底架,于其中一个底架上设一驱动电机,驱动电机的输出端与一卷盘相连接;于另一个底架上转动设有一轴杆,所述轴杆上连接一卷盘,左右两个卷盘处于同一竖平面内,并且两个卷盘上共同缠绕一根清洗
带。
16.优选的是,所述基台上具有一沿其长度方向开设、向内凹陷的槽位,所述清洗带的中间部分落入槽位中。
17.与现有技术相比,本实用新型具有如下优点:油漆通过移印的方式,即经过移印固定座上的若干移印胶头将移印钢板上凹痕的油漆移印到弹簧的外圈弧面上,此外清除机构还可及时对移印胶头进行清理,以免移印胶头上堆积的油漆过多影响到移印效果。本实用新型不仅自动化程度高,而且涂漆更加均匀,点漆的效果好、效率高。
附图说明
18.下面结合附图对本实用新型的具体实施方式作进一步详细的说明。
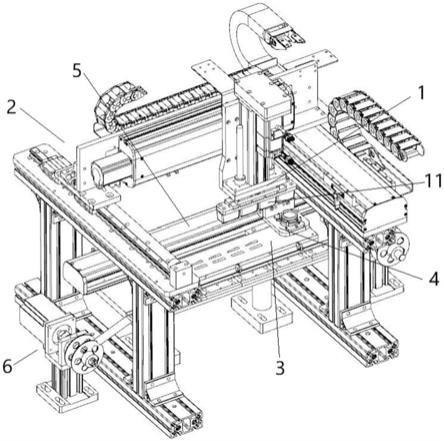
19.图1是本实用新型实施例一种弹簧外圈弧面点漆装置的结构示意图;
20.图2是本实用新型实施例精定位移动机构的结构示意图;
21.图3是本实用新型实施例清除机构的相关结构示意图;
22.图中,各附图标记为:
23.1-移印固定座,2-精定位移动机构,3-移印钢板,4-油蛊组,5-移动伺服机构,6-清除机构,7-基台,11-移印胶头,21-侧撑架,22-y轴机器人,23-x轴机器人,24-z轴升降伺服机构,31-凹痕,61底架,62-驱动电机,63-轴杆,64-卷盘,65-清洗带,71-槽位,211-滑轨,212-移动块。
具体实施方式
24.为了更清楚地说明本实用新型,下面结合优选实施例对本实用新型做进一步的说明。本领域技术人员应当理解,下面所具体描述的内容是说明性的而非限制性的,不应以此限制本实用新型的保护范围。
25.请参阅图1所示,本实用新型提供以下技术方案:一种弹簧外圈弧面点漆装置,包括:移印固定座1,其上阵列有若干移印胶头11;精定位移动机构2,可带动移印固定座1在x、y、z方向进行移动;移印钢板3,处于移印固定座1下方,其表面具有凹痕31;油蛊组4,通过一移动伺服机构5于移印钢板3的上方左右移动,以使油蛊组4内的油漆将移印钢板3表面上的凹痕31填满;清除机构6,设于移印固定座1下方,以对移印胶头11表面上的油漆进行清理。
26.详见如图2所示,精定位移动机构2包括支撑架组,其上具有一y轴机器人22,y轴机器人22上滑动安装有一x轴机器人23,x轴机器人23上滑动安装有一z轴升降伺服机构24,z轴升降伺服机构24连接移印固定座1。
27.需要说明的是,在本实施例中,y轴机器人和x轴机器人均为单轴机器人,而z轴升降伺服机构和移动伺服机构的构造可选用常见的电机驱动式丝杆移动机构、线性模组、电动滑台等。x轴机器人安装在y轴机器人上,并且能够沿着y轴机器人的延伸方向进行水平滑动,z轴升降伺服机构安装在x轴机器人上,并且能够沿着x轴机器人的延伸方向进行水平滑动。对于本领域的技术人员而言,y轴机器人、x轴机器人和z轴升降伺服机构三者间的安装方式属于常规操作。
28.进一步的,支撑架组包括左右间隔平行设置的一对侧撑架21;y轴机器人22布置于其中一个侧撑架上,另一个侧撑架上安装有与y轴机器人22相平行的滑轨211,x轴机器人23
的一端通过一移动块212滑动安装于滑轨211上。
29.此外,详见图3所示,两个侧撑架21之间布置有一基台7,移印钢板3与移动伺服机构5呈前后设置于基台7上;油蛊组4滑动安装于移动伺服机构5上,且在移动过程中经过移印钢板3上的凹痕31。移印钢板上的凹痕形状可根据实际工艺生产需求进行设计。
30.在本实施例中,详见图3所示,清除机构6包括相向设于基台7左右两侧的底架61,于其中一个底架上设一驱动电机62,驱动电机62的输出端与一卷盘64相连接;于另一个底架上转动设有一轴杆63,轴杆63上连接一卷盘64,左右两个卷盘处于同一竖平面内,并且两个卷盘64上共同缠绕一根清洗带65。
31.而且,基台7上具有一沿其长度方向开设、向内凹陷的槽位71,清洗带65的中间部分落入槽位71中。
32.弹簧涂漆过程如下:首先,通过驱动基台7上的移动伺服机构5,以使油蛊组4在移印钢板3的上方左右移动,进而将移印钢板3表面上的凹痕31填满油漆;接着,通过控制y轴机器人22、x轴机器人23和z轴升降伺服机构24,以分别调整移印固定座于y、x、z的方向,进而使移印固定座1上的移印胶头11移动至移动钢板3的上方,并且将凹痕31上油漆粘起,如此便可通过移印胶头11将此油漆印刷到固定于其他工位上的弹簧的外圈弧面上,完成涂漆工作;再进行下一次移印过程时,通过控制y轴机器人22、x轴机器人23和z轴升降伺服机构24,以分别调整移印固定座于y、x、z的方向,进而使移印固定座1上的移印胶头11移动至与清洗带65接触,通过控制驱动电机62,使清洗带65左右滑动地与移印胶头11摩擦接触,进而达到对移印胶头11上残留油漆的清理,清理结束后,再重复之前操作。
33.显然,本实用新型的上述实施例仅仅是为清楚地说明本实用新型所作的举例,而并非是对本实用新型的实施方式的限定,对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动,这里无法对所有的实施方式予以穷举,凡是属于本实用新型的技术方案所引伸出的显而易见的变化或变动仍处于本实用新型的保护范围之列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1