一种热熔胶快速稳压控制方法与流程
1.本发明涉及热熔胶点胶领域,尤其涉及一种热熔胶快速稳压控制方法。
背景技术:
2.热熔胶机是一种可将固态的热熔胶熔化,并通过加压装置将熔化后变为液态的胶输送到涂布装置对基材实行涂布,集温度加热控制,加压功能,液体输送和挤出涂布功能于一体的机电设备。传统工艺的加压功能由变频电机和泄压装置来实现;当所需胶压较大时,提高电机转速,当所需胶压较小时,降低电机转速;泄压阀保证胶管压力始终在安全压力以下;此方式的缺点是电机对压力响应速度慢、精度不高,同时电机既要调压又要循环胶水,对出胶量的稳定性有极大影响。
技术实现要素:
3.针对现有技术存在的问题:本发明由机械气动调压装置调节胶压,通过模型精确计算所需输出气压,从而保证热熔机领域应用时得到精准的胶压。
4.本发明解决其技术问题所采用的技术方案是:一种热熔胶快速稳压控制方法,包括以下步骤:a1、机械结构为气量调节装置和气动调压装置,建立气压和胶压之间的模型关系;p
in
为气量调节装置的输出气压,同时也是气动调压装置的输入气压;气动调压装置的活塞机构移动会调整胶水的流通量,从而调节胶水的压力即胶压p
out
;a2、利用力平衡原理建立气量调节装置输出的气压p
in
与胶压p
out
的关系,其中,k为比例系数,b为机构摩擦力分量;考虑到密封性,活塞外径会加上高温密封圈,所以活塞移动时高温密封圈与气动调压装置外壁会产生较大的摩擦力,以f表示;当所需胶压上升时:p
in
×
s1=p
out
×
s2+fp
in=
p
out
×
(s2/s1)+f/s1
ꢀꢀꢀꢀꢀꢀꢀ
(1)当所需胶压下降时:p
in
×
s1+f=p
out
×
s2p
in=
p
out
×
(s2/s1)-f/s1
ꢀꢀꢀꢀꢀꢀꢀꢀ
(2)则,k=s2/s1,b=
±
f/s1;其中,s1为气动调压装置气压侧受力面积,s2为气动调压装置胶压侧受力面积;a3、实时采集胶压,结合公式,以及pid算法修正气量调节装置输出气压,得到准确的气压p
,in
;a31、控制器根据外部机台设定的胶压数据确定某一刻的目标胶压p
t
;机台设定胶压数据以0~10v模拟量提供,0v对应胶压0,10v对应最大胶压p
max
;若某
一时刻检测到的电压为vo,那么此时目标胶压p
t
:p
t
=vo×
p
max
/10
ꢀꢀꢀ
(3)a32、通过实际测量胶压,建立pid经验数据集;数据集根据目标胶压p
t
和测量胶压p
out
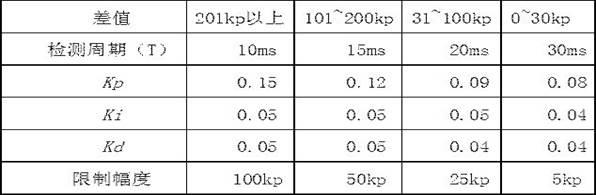
的差值,分为4个调节档位,建立差值、检测周期、kp、ki、kd和限制幅度关系表,如表1所示:表1 压差、检测周期、kp、ki、kd和限制幅度关系表a33、根据目标胶压和测量胶压差值,查表得到比例系数k
p
、积分系数ki和微分系数kd;k
p
、ki、kd的作用如下:(1) 比例系数k
p
的作用是加快系统的响应速度,提高系统的调节精度;k
p
越大,系统的响应速度越快,系统的调节精度越高,但易超调,甚至不稳定;k
p
取值过小,则会降低调节精度,响应速度减慢;(2)积分系数ki的作用是消除系统的稳态误差;ki越大,系统的静态误差消除越快,但在响应的初期会产生积分饱和现象,从而引起超调,ki过小,静态误差难以消除,影响调节精度;(3)微分系数kd的作用是改善系统的动态特性,其作用主要是响应过程中抑制偏差向任何方向的变化,对偏差变化进行提前调整;但kd过大时会使响应过程提前制动,而且会降低抗干扰性能;a34、根据增量式pid算出气量调节装置的输出修正值δu;修正值δu与步骤a2输出的气压p
in
相加,得到新的气压p
,in
;n时刻离散pid公式:则n-1时刻离散pid为:1时刻离散pid为:
pid控制程序以检测周期t进行采样,其中n为采样序号,为第n次采样的目标胶压p
t
和当前胶压p
out
的差值;根据计算出来的气量调节装置的修正值δu,修改当前气量调节装置的输出量;对于每一步的增量,为了防止过调,限制调节幅度。
5.本发明的有益效果:1、实时检测胶压,通过pid算法修正所需供气压,使得1秒内可以使供胶压力和设定压力的误差在2kpa以内,从而保证热胶在点胶过程中,获得稳定的点胶效果和精准的出胶量。
附图说明
6.图1为发明热熔胶快速稳压控制方法流程图;图2为本发明气动调压装置。
具体实施方式
7.本发明的一种热熔胶快速稳压控制方法,包括如下步骤:a1、机械结构为气量调节装置和气动调压装置,建立气压和胶压之间的模型关系,如图2为气动调压装置,气量调节装置使用比例阀型号为felon flt35,比例阀与气动调压装置输入端连接;比例阀felon flt35供气压力理论值为600kpa,其输出气压为0~500kpa,设定电机转速恒定为70转/分;胶压上升时测试胶压与气压的数据如表2所示:表2胶压上升时,供气压力和胶压测试数据(单位kpa)胶压下降时测试胶压与气压的数据如表3所示:表3胶压下降时,供气压力和胶压测试数据(单位kpa)a2、利用力平衡原理建立气量调节装置输出的气压p
in
与胶压p
out
的关系,其中,k为比例系数,b为机构摩擦力分量;胶压上升时对表2的测量值进行线性拟合,取
ꢀꢀꢀꢀ
(5)
胶压下降时对表3的测量值进行线性拟合,取
ꢀꢀꢀꢀ
(6)a3、采集电压0~10v模拟通道信号,通过式(3)计算出当前目标胶压p
t
;将p
t
作为p
out
初始值代入公式(5)和(6)计算出初始气量调节装置的气压p
in
;实时采集胶压p
out
,根据当前的设定胶压p
t
和实时采集胶压p
out
的偏差范围,从表1中得到对应的pid系数kp、ki、kd和检测周期t;使用增量式pid,由公式(4)计算出调节量δu,对于调节量进行对应的幅度限制,然后将当前气压p
in
+δu作为新的气压值p
,in
写入气量调节装置。
8.本发明方法分别测试了低粘度和高粘度胶,均可以在1秒时候内稳定供胶压力,压力精度为2kpa。
9.以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1