一种低层建筑的机械化破碎结构及其使用方法与流程
1.本技术涉及建筑施工领域,尤其是涉及一种低层建筑的机械化破碎结构及其使用方法。
背景技术:
2.随着城市人口的不断增加,城市的土地资源越来越少,许多老旧小区需要拆除以建造新兴小区,满足人口增长的需求。在这些建筑物中低于10层以下的低层建筑占比非常高。
3.对于低层建筑,拆除方式主要为机械化破碎拆除,机械化破碎拆除的优点在于效率高、对环境污染小、对周边居民的生活影响低。低层建筑拆除后,其内部的钢筋可以进行回收处理,目前的回收方式大多为直接破碎后建筑垃圾进行转运处理。
4.但是破碎拆除后的建筑垃圾通常带有大量的混凝土块,转运时需要花费大量的人力物力,并且转运后通常为人工敲碎混凝土块,回收效率较低。
技术实现要素:
5.本技术为了实现建筑垃圾内的钢筋就地回收、提高回收效率,提供了一种低层建筑的机械化破碎结构及其使用方法。
6.一方面,本技术提供一种低层建筑的机械化破碎结构:
7.一种低层建筑的机械化破碎结构,包括机体,所述机体顶部位置处开设有进料口,机体内部为中空的破碎腔,机体内设置有两组相互平行、用以绞碎建筑垃圾的破碎辊,破碎辊的下方设置有精碎板,精碎板与破碎辊之间设置有可水平往复移动的可动板,精碎板和可动板相互正对的侧面均固定设置有多个破碎齿,可动板的滤孔尺寸大于精碎板的滤孔尺寸,机体在精碎板上方的一侧开设有钢筋排出口,机体在可动板下方的一侧位置开设有碎渣排出口。
8.通过采用上述方案,建筑废料通过进料口进入破碎腔内部,首先通过破碎辊进行破碎处理,破碎过程中混凝土被挤压成碎块,钢筋被挤压成团然后继续掉落,紧接着可动板往复运动将钢筋送往钢筋排出口,从可动板向下掉落的碎块继续被破碎齿进一步挤压破碎,最终碎渣从碎渣排出口排出,因此,建筑废料能够通过破碎结构进行全面破碎处理,使得回收的钢筋上面带有的混凝土块尽可能少,并且建筑废料尽可能被破碎,便于后续的运输和处理,大大提高了建筑垃圾内的钢筋的回收效率。
9.可选的,所述进料口位置处设置有上料传送带,上料传送带倾斜向上延伸至进料口后水平伸入机体内,且上料传送带的端部延伸至两组破碎辊之间位置。
10.可选的,所述机体的顶部位置处固定设置有压料气缸,压料气缸的活塞杆底部插入机体内且固定有压料块,压料块从上至下截面尺寸逐渐减小,且压料块的底部位于两组破碎辊的中心连线中间位置处。
11.可选的,所述机体顶部位置处滑动设置有检测条,检测条滑动方向与上料传送带
的水平传送方向一致,检测条的底端伸入机体内部,检测条与机体通过弹簧连接,检测条与压料气缸之间设置有距离传感器,距离传感器的输出端连接控制器,控制器响应于距离传感器的距离信号以在检测条与压料气缸之间距离低于预设值时控制器控制压料气缸启动进行压料处理。
12.可选的,所述机体顶端固定设置有安装条,安装条位于检测条背离压料气缸的一侧,安装条与检测条之间设置有复位弹簧,复位弹簧的两端分别与检测条和安装条固定。
13.可选的,所述机体相对的两侧开设有滑动孔,可动板的两端穿出滑动孔并与滑动孔滑动配合,机体的一侧设置有带动可动板往复运动的往复驱动件。
14.可选的,所述可动板上方设置有清扫杆,清扫杆的中心位置固定设置有旋转轴,旋转轴竖直向下穿过可动板、精碎板以及机体后与一旋转驱动件连接,可动板表面开设有尺寸大于旋转轴、确保可动板顺利往复移动的让位孔。
15.可选的,所述旋转驱动件包括旋转主动齿轮、旋转从动齿轮以及旋转电机,旋转电机的输出轴与旋转主动齿轮固定,旋转主动齿轮与旋转从动齿轮啮合,旋转从动齿轮与旋转轴固定连接;旋转轴内部中空,且旋转轴底部连通有进气管,进气管与旋转轴采用转动连接方式固定;进气管底端连通活塞式气泵,清扫杆为内部中空且可重复充气放气的可收缩结构。
16.另一方面,本技术提供一种低层建筑的机械化破碎结构的使用方法,包括以下步骤:
17.a、将破碎拆除的建筑废料放置上料传送带,通过上料传送带送入机体内部;
18.b、启动破碎辊对建筑废料进行初次破碎;
19.c、启动往复驱动件以及旋转驱动件,对掉落至可动板表面的经过初次破碎的建筑废料进一步清理,部分废渣掉落至精碎板进一步破碎处理,回收钢筋通过钢筋排出口排出,粉碎的废渣从废渣排出口排出;
20.d、同时启动活塞式气泵,定期充气、放气,以通过清扫杆不断抬起或放下掉落至可动板上的废料,避免废料卡在可动板的滤孔内,确保钢筋回收效率。
21.综上所述,本技术具有以下技术效果:
22.1.通过对建筑废料进行多次破碎处理,提高钢筋的回收效率,并且建筑废渣的运输和处理更加方便;
23.2.通过在机体顶部位置设置检测条以及距离传感器,因此建筑垃圾在上料不顺畅的时候,会推动检测条移动,从而将距离信号传递给控制器,控制器能够控制压料气缸启动,从而确保上料顺畅性;
24.3.通过在可动板上方设置清扫杆,并且将清扫杆设置为可重复充气放气的收缩结构,从而使得建筑废料以及待回收钢筋不会卡在卡动板表面,确保机体内部不会发生过分堵塞。
附图说明
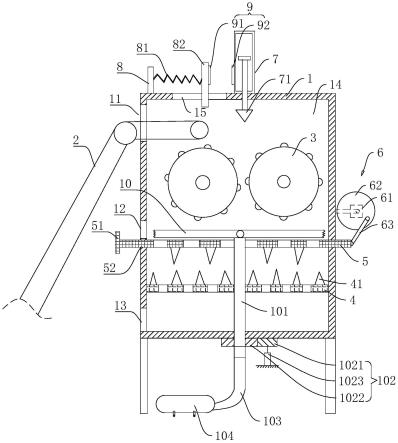
25.图1是本技术实施例中的整体剖面结构示意图;
26.图2是本技术实施例中机体的俯视图;
27.图3是清扫杆的剖视图。
28.图中,1、机体;11、进料口;12、钢筋排出口;13、碎渣排出口;14、破碎腔;15、复位滑孔;2、上料传送带;3、破碎辊;31、破碎驱动电机;32、破碎主动齿轮;33、破碎从动齿轮;4、精碎板;41、破碎齿;5、可动板;51、限位块;52、让位孔;6、往复驱动件;61、往复电机;62、转盘;63、连杆;7、压料气缸;71、压料块;8、安装条;81、复位弹簧;82、检测条;9、距离传感器;91、红外发射器;92、红外接收器;10、清扫杆;101、旋转轴;102、旋转驱动件;1021、旋转主动齿轮;1022、旋转从动齿轮;1023、旋转电机;103、进气管;104、活塞式气泵。
具体实施方式
29.以下结合附图对本技术作进一步详细说明。
30.参照图1,本技术提供的一种低层建筑的机械化破碎结构,包括机体1,机体1顶部的一侧位置处开设有进料口11,进料口11处设置有上料传送带2,上料传送带2倾斜设置且顶端水平穿入进料口11内部,建筑废料通过上料传送带2被输送进入机体1内部进行破碎处理。
31.机体1内部为中空的破碎腔14,破碎腔14内靠近顶部位置处设置有两组相互平行的破碎辊3,破碎辊3的两端与机体1内壁形成转动连接,且破碎辊3的转动轴线垂直于上料传送带2的水平传送方向。为了进一步确保破碎效果,上料传送带2的端部延伸至两组破碎辊3之间。
32.结合图1和图2,机体1的外侧壁设置有用于带动破碎辊3转动的破碎驱动件,具体地,破碎驱动件包括破碎驱动电机31、破碎主动齿轮32和破碎从动齿轮33,其中,破碎主动齿轮32和破碎从动齿轮33分别与其中一个破碎辊3的端部固定,破碎主动齿轮32和破碎从动齿轮33相互啮合,破碎驱动电机31的输出轴与破碎主动齿轮32固定,从而带动两个破碎辊3相向转动,实现对建筑垃圾的破碎处理。
33.破碎辊3的下方依次设置有可动板5和精碎板4,可动板5与精碎板4相互平行,且可动板5与精碎板4相互正对的一侧表面均固定设置有多个破碎齿41。可动板5、精碎板4表面均开设有多个滤孔,可动板5的滤孔尺寸大于精碎板4的滤孔尺寸,具体地,以可动板5的滤孔尺寸为精碎板4滤孔尺寸的1.5-2倍为宜。
34.可动板5表面的破碎齿41与精碎板4表面的破碎齿41错开设置,且破碎齿41的齿端间隔2-4cm,破碎齿41整体呈尖刺状设置,从而使得在可动板5与精碎板4之间的建筑垃圾得到进一步的精碎处理。
35.精碎板4的两端与机体1内壁固定连接,可动板5的两端分别穿出机体1并与机体1形成水平滑动配合,可动板5的一端穿出机体1后固定连接有限位块51,以限制可动板5的滑动距离。可动板5背离限位块51的一端设置有带动可动板5往复运动的往复驱动件6。
36.往复驱动件6包括往复电机61、转盘62以及连杆63,往复电机61固定于机体1侧壁且往复电机61的输出轴水平设置,转盘62与往复电机61的输出轴固定,转盘62的非中心位置处设置有一铰接点,连杆63的一端通过铰接点与转盘62铰接,另一端与可动板5的端部铰接相连,因此往复电机61、转盘62、连杆63以及可动板5能够形成一组曲柄滑块机构,从而使得可动板5能够往复移动。
37.机体1的一侧开设有钢筋排出口12,且钢筋排出口12位于可动板5的上表面。同时,在机体1的底部位置处开设有碎渣排出口13,碎渣排出口13位于精碎板4的下方。建筑废料
通过破碎辊3进行初步破碎后,掉落至可动板5表面,钢筋难以被直接破碎,因此会在经过破碎辊3后被弯折或折叠,并在可动板5的往复运动下带动至钢筋排出口12排出,而一些碎块则会掉落至精碎板4与可动板5之间被破碎齿41进一步破碎处理。此时,可动板5的运动既可以满足钢筋的运送排出,又能够对精碎板4和可动板5之间的小块状废料进一步破碎处理,破碎后的碎渣从碎渣排出口13排出。
38.机体1的顶部位置处固定设置有压料气缸7,压料气缸7的活塞杆竖直向下插入机体1内部,且活塞杆的底部固定设置有压料块71,压料块71为从上至下截面尺寸逐渐减小的倒锥形结构,且压料块71的底部位于两组破碎辊3之间。
39.机体1的顶部位置处固定设置有安装条8,安装条8位于上料传送带2水平段的正上方,安装条8与压料气缸7之间设置有检测条82,检测条82所在的机体1表面位置处开设有供检测条82水平滑动的复位滑孔15,检测条82在复位滑孔15内的滑动方向与上料传送带2水平段的传送方向一致,且检测条82与安装条8之间通过复位弹簧81形成连接,检测条82与压料气缸7之间设置有距离传感器9,以在检测条82与压料气缸7之间的距离低于预设值时,控制器能控制压料气缸7启动,从而对机体1内的建筑废料进行下压处理,确保建筑废料的破碎顺畅性。具体地,距离传感器9包括固定于检测条82朝向压料气缸7一侧表面的红外发射器91以及安装于压料气缸7正对位置处的红外接收器92。当进入机体1内的建筑废料过多或者整体尺寸较大,则建筑废料会碰触检测条82并推动检测条82靠近压料气缸7,距离传感器9将距离信号传递给控制器,控制器响应于距离信号并控制压料气缸7启动,压料气缸7带动压料块71将建筑废料向两破碎辊3的中心下压,加速破碎,提高破碎效率。
40.结合图1和图3,为了降低破碎后的建筑废料在机体1内部的堵塞,在可动板5的上表面设置有用于定时对可动板5表面进行旋转清扫的清扫杆10,清扫杆10的中心位置处固定设置有旋转轴101,旋转轴101从上至下依次穿过可动板5、精碎板4以及机体1底部后与旋转驱动件102连接。由于可动板5需要水平往复移动,因此在旋转轴101穿过可动板5的位置处设置让位孔52,让位孔52的长度大于可动板5的水平移动距离,以确保可动板5的移动不受干涉。
41.旋转驱动件102包括旋转主动齿轮1021、旋转从动齿轮1022以及旋转电机1023,旋转从动齿轮1022与旋转轴101固定,旋转主动齿轮1021与旋转从动齿轮1022啮合,且旋转主动齿轮1021、旋转从动齿轮1022均与机体1表面形成转动连接,旋转电机1023的输出轴与旋转主动齿轮1021固定。通过旋转驱动件102定时带动清扫杆10转动,使得可动板5表面的待回收钢筋以及大颗粒杂物能够顺利从钢筋排出口12排出。
42.进一步地,结合图1和图3,为了避免钢筋的端部插入可动板5的滤孔内造成下料困难,本实施例中将清扫杆10设置为内部中空、可通过充气放气实现收缩膨胀的结构,具体可以为橡胶材质,且旋转轴101内部中空并与清扫杆10内部连通,旋转轴101的底端通过转动连接方式连通有一进气管103,进气管103背离旋转轴101的端部可以与活塞式气泵104联通,因此,可以通过活塞式气泵104进行间歇式充气放气,从而实现清扫杆10的收缩、膨胀,以抬起掉落在可动板5表面的钢筋,配合着清扫杆10的旋转运动,实现建筑废料的顺利排出。
43.另一方面,本实施例提供一种低层建筑机械化破碎结构的使用方法,包括以下步骤:
44.a、将破碎拆除的建筑废料放置上料传送带2,通过上料传送带2送入机体1内部;
45.b、启动破碎辊3对建筑废料进行初次破碎;
46.c、启动往复驱动件6以及旋转驱动件102,对掉落至可动板5表面的经过初次破碎的建筑废料进一步清理,部分废渣掉落至精碎板4进一步破碎处理,回收钢筋通过钢筋排出口12排出,粉碎的废渣从废渣排出口排出;
47.d、同时启动活塞式气泵104,定期充气、放气,以通过清扫杆10不断抬起或放下掉落至可动板5上的废料,避免废料卡在可动板5的滤孔内,确保钢筋回收效率。
48.本具体实施例仅仅是对本技术的解释,其并不是对本技术的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本技术的权利要求范围内都受到专利法的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1