磁性混合设备的制作方法
磁性混合设备
1.本技术是申请日为2018年09月12日,申请号为201880087428.0,发 明名称为“磁性混合设备”的申请的分案申请。
2.相关申请的交叉引用
3.本技术要求2017年11月28日提交的第62/591,370号美国临时申请 和2018年7月6日提交的第16/029,216号美国非临时专利申请的权益和 优先权,为了所有的目的,这些申请中的每一个通过引用以其整体并入。
[0004][0005]
技术领域
[0006]
本发明涉及磁性混合系统和细胞溶解的领域。具体而言,本公开涉及 使用搅拌棒在混合腔室内混合样本和/或溶解细胞从而使搅拌棒与混合腔 室壁的相互作用最小化的系统、装置和方法。
[0007]
背景
[0008]
生物方法中的许多步骤需要将不同的溶液混合在一起,例如以细胞溶 解为目的的细胞样本。在实验室中,这种混合通常是在实验室工作台上使 用涡流混合器手动执行的。然而,很难在可消耗的即时诊断装置上实现涡 流混合,因为对于少量流体、粘性溶液和不同密度的溶液来说,扩散是不 充分的。
[0009]
将不同溶液混合在一起的另一种方法是使用能够旋转的磁性搅拌板 和磁性搅拌棒。然而,搅拌棒在旋转过程中与装有搅拌棒的混合容器壁的 强力接触会导致容器壁或搅拌棒的损坏,以及样本的污染。
[0010]
概述
[0011]
本发明总体上涉及一种磁性混合设备,其使用搅拌棒混合被容纳在混 合腔室中的样本,同时将搅拌棒与混合腔室壁的接触量最小化。
[0012]
在一个方面,本公开提供了一种磁性混合设备,其包括驱动磁体系统、 驱动马达、从动磁体系统、分开驱动磁体系统和从动磁体系统的间隙、设 置在间隙内的静止的混合组件、以及搅拌棒。在一些实施例中,驱动磁体 系统包括一个或更多个驱动磁体。在进一步的实施例中,驱动磁体系统被 配置成围绕驱动磁体旋转轴线旋转。驱动磁体系统可以可操作地和/或机械 地联接到驱动马达,并且驱动马达能够驱动驱动磁体系统围绕驱动磁体旋 转轴线旋转。在某些实施例中,从动磁体系统包括一个或更多个从动磁体。 在进一步的实施例中,从动磁体系统被配置成围绕从动磁体旋转轴线旋转。 从动磁体系统和驱动磁体系统在间隙对面的布置实现了每个驱动磁体和 对应的从动磁体之间的磁性耦合,由此驱动磁体系统围绕驱动磁体旋转轴 线的旋转诱发从动磁体系统围绕从动磁体旋转轴线的旋转。静止的混合组 件可以包括混合腔室,该混合腔室具有被边界表面包围的混合腔室容积。 搅拌棒可以容纳在混合腔室容积内。在一些实施例中,搅拌棒可以包括搅 拌棒体积和铁磁性材料。搅拌棒在驱动磁体系统和从动磁体系统之间的部 署可以产生低磁阻磁路,并
且实现了搅拌棒、一个或更多个驱动磁体中的 至少一个和一个或更多个从动磁体中的至少一个之间的磁性耦合,由此, 驱动磁体系统围绕驱动磁体旋转轴线的旋转和从动磁体系统围绕从动磁 体旋转轴线的旋转诱发搅拌棒围绕搅拌棒旋转轴线的旋转。
[0013]
在某些方面,一个或更多个驱动磁体中的至少一个具有磁性轴线,该 磁性轴线与一个或更多个从动磁体中的一个的磁性轴线对准,使得磁体彼 此吸引。在另一方面,搅拌棒被吸引到驱动磁体系统和从动磁体系统。
[0014]
在一些实施例中,一个或更多个驱动磁体安装在驱动磁体保持器中, 该驱动磁体保持器被配置为绕驱动磁体旋转轴线旋转。在进一步的实施例 中,驱动磁体主轴可操作地联接到驱动磁体保持器和驱动马达。驱动磁体 主轴可以与驱动磁体旋转轴线大体上共线。在这样的实施例中,驱动马达 能够驱动驱动磁体保持器围绕驱动磁体旋转轴线旋转。在一个实施例中, 驱动磁体系统可以包括单个驱动磁体。在这样的实施例中,单个驱动磁体 的最大尺寸可以垂直于驱动磁体的旋转轴线。在一个替代实施例中,驱动 磁体系统可以包括两个驱动磁体,这两个驱动磁体分开一定距离,该距离 横切驱动磁体的旋转轴线。通常,驱动磁体保持器将两个驱动磁体相对于 彼此保持在固定的几何结构(fixed geometry)。
[0015]
在另外的实施例中,一个或更多个从动磁体安装在从动磁体保持器中, 该从动磁体保持器被配置为绕从动磁体旋转轴线旋转。在这样的实施例中, 从动磁体主轴可以可操作地联接到从动磁体保持器。在进一步的实施例中, 从动磁体主轴可以与从动磁体旋转轴线大体上共线。在一个实施例中,从 动磁体系统可以包括单个从动磁体。在这样的实施例中,单个从动磁体的 最大尺寸可以垂直于从动磁体的旋转轴线。在一个替代实施例中,从动磁 体系统可以包括两个从动磁体,这两个从动磁体分开一定距离,该距离横 切从动磁体旋转轴线。通常,从动磁体保持器将两个从动磁体相对于彼此 保持固定的几何结构。
[0016]
在一些实施例中,一个或更多个驱动磁体和从动磁体是钕磁体。在某 些实施方式中,驱动磁体系统的剩余通量密度在5000高斯和40000高斯 之间,从动磁体系统的剩余通量密度在5000高斯和40000高斯之间。在 进一步的实施例中,分开驱动磁体系统和从动磁体系统的间隙可以是 10-30mm。
[0017]
在一些实施例中,搅拌棒的铁磁性材料是铁素体不锈钢或双相不锈钢。 在进一步的实施例中,搅拌棒包括永磁体。在另外的实施例中,搅拌棒的 相对磁导率可以在500-1,000,000之间。在某些实施例中,搅拌棒位于混合 腔室内,使得搅拌棒的旋转平面与驱动磁体系统和从动磁体系统大体上等 距。
[0018]
在一些实施例中,混合组件可以设置在间隙内,使得驱动磁体旋转轴 线、从动磁体旋转轴线和搅拌棒旋转轴线大体上共线,并且使得搅拌棒与 混合腔室的边界表面几乎不接触。在某些实施例中,静止的混合组件可以 保持在混合组件保持器内。在一些实施例中,混合组件是一次性的。
[0019]
在某些实施例中,混合腔室容积和搅拌棒体积成比例,使得搅拌棒与 混合腔室的边界表面几乎不接触。例如,在一些实施例中,混合腔室容积 可以包括0.1ml-100ml。在一些实施例中,搅拌棒体积可以包括50ul-10ml。
[0020]
在一些实施例中,混合腔室的最大尺寸和搅拌棒的最大尺寸成比例, 使得搅拌棒与混合腔室的边界表面几乎不接触。在这样的实施例中,混合 腔室容积的最大尺寸可以包括1mm-200mm。在另外的实施例中,搅拌棒 体积的最大尺寸是0.5mm-180mm。
[0021]
在一些实施例中,磁性混合设备还包括一个或更多个场聚焦器,该一 个或更多个场聚焦器联接到一个或更多个驱动磁体和一个或更多个从动 磁体中的至少一个,场聚焦器被定位成将由驱动磁体系统和从动磁体系统 产生的磁场沿着驱动磁性系统和从动磁性系统的最大尺寸朝向狭窄的径 向段聚焦。在一些实施例中,珠粒可以容纳在混合腔室容积内。
[0022]
在某些实施例中,磁性混合设备还可以包括声学机构,该声学机构用 于检测搅拌棒从驱动磁体系统和从动磁体系统中的一个或更多个磁解耦 (magnetic decouple)。在这样的实施例中,声学机构被配置为检测在驱动 磁体系统旋转期间由搅拌棒产生的振动的振幅和频率中的一个或更多个 中的变化,该变化指示搅拌棒的磁解耦。在一些实施例中,该变化包括由 搅拌棒产生的振动的振幅和频率中的一个或更多个中的突然降低。在一些 实施例中,声学机构包括麦克风。
[0023]
另一方面,本公开提供了使用化学方法溶解细胞的方法。该方法可以 包括将包括细胞的样本引入上述混合腔室,提供了包括一种或更多种化学 溶解剂的溶液,并给驱动马达供能,由此给驱动马达供能充分旋转搅拌棒, 以在混合腔室内将样本与化学溶液混合,从而促进细胞溶解。在这样的实 施例中,如上所述,可以通过向混合腔室中加入珠粒并将珠粒与样本混合 来促进细胞溶解。
[0024]
附图简述
[0025]
当结合附图阅读时,可以进一步理解本技术。为了说明主题,在附图 中示出了主题的示例性实施例;然而,目前公开的主题不限于公开的特定 方法、装置和系统。此外,附图不一定按比例绘制;为了清楚起见,部件 的尺寸和相对尺寸可能被夸大。自始至终,相似的数字指的是相似的元件。
[0026]
在附图中:
[0027]
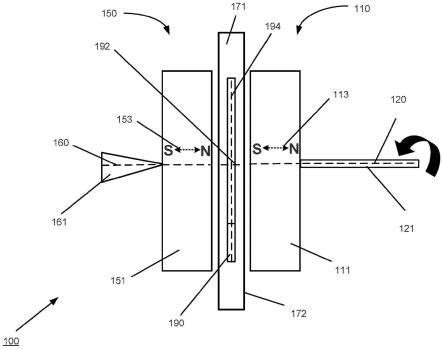
图1是根据一个实施例的磁性混合设备的示意图的断面图。
[0028]
图2是根据一个实施例的包括去锂化驱动磁体(di-lithic driving magnet) 和去锂化从动磁体的磁性混合设备的示意图的断面图。
[0029]
图3a是根据本公开主题的实施例的磁性混合设备的图解;
[0030]
图3b是根据本公开主题的实施例的混合组件的图解;
[0031]
图4是根据一个实施例的磁性混合设备的分解图的图解。
[0032]
图5是根据一个实施例的磁性混合设备的断面图的图解。
[0033]
图6是根据一个实施例的混合组件的断面图的横截面的图解。
[0034]
图7示出了根据一个实施例的支撑板。
[0035]
图8a示出了根据一个实施例的使用混合组件执行的混合过程的第一 步骤。
[0036]
图8b示出了根据一个实施例的使用混合组件执行的混合过程的第二 步骤。
[0037]
图8c示出了根据一个实施例的使用混合组件执行的混合过程的第三 步骤。
[0038]
图8d示出了根据一个实施例的使用混合组件执行的混合过程的第四 步骤。
[0039]
图9是描述在使用不同混合方法制备样本之后,在样本上进行qpcr 期间获得的dna扩增曲线的图:长划线表示在台架(bench)处与缓冲液和 珠粒混合的细胞的扩增曲线;中划线表示在台架处仅与溶解缓冲液混合的 细胞的扩增曲线;短划线代表用容纳溶解缓冲液和珠粒的混合设备处理的 细胞的扩增曲线。
[0040]
详细描述
[0041]
本文提供了用于使用搅拌棒混合容纳在混合腔室中的样本同时将搅 拌棒和界定混合腔室的表面(“边界表面”)之间的接触量最小化的系统、 装置和方法。该方法包括将样本引入容纳铁磁性搅拌棒的混合腔室中,旋 转位于混合腔室一侧的驱动磁体系统,诱发位于混合腔室相对侧的从动磁 体系统旋转,并诱发铁磁性搅拌棒旋转,从而混合样本。
[0042]
在公开的实施例被更详细地描述之前,应当理解的是,本公开不限于 所描述的特定的实施例,因为这些当然可以改变。还应当理解的是,本文 所用的术语仅为了描述特定实施方案的目的,并不旨在限制,因为本公开 内容的范围将仅由所附的权利要求限定。
[0043]
当提供数值的范围时,应理解的是,在该范围的上限和下限(upper andlower limit)以及所描述的范围内的任何其它描述的间值(intervening value) 之间的间值(至该下限的单位的十分之一,除非上下文另有明确说明)包 含在本公开内。这些较小范围的上限和下限可独立地包括在所述较小范围 中,并且也包含在本公开中,服从于所描述范围中任何被特定排除的界限 (limit)。在所描述的范围包括界限中的一个或两者时,排除那些所包括的 界限中的任一个或两个的范围也包括在本公开中。
[0044]
某些范围在这里可以用前面带有术语“大约”的数值来表示。术语“大 约”在这里用于为它之后的确切数字以及接近或近似该术语之后的数字的 数字提供字面支持。在确定一个数是否接近或近似一个具体记载的数时, 该接近或近似的未记载的数可以是这样一个数,即,在给出它的上下文中, 该数提供了具体记载的数的基本等价物。
[0045]
除非另有限定,否则在本文中使用的所有技术术语和科学术语都具有 与这些公开的实施例所属的领域的普通技术人员通常所理解的相同的含 义。尽管类似或等同于本文描述的任何方法和材料也可用于公开的实施例 的实践或测试中,但是现将描述代表性说明性的方法和材料。任何记载的 方法可以以记载的事件的顺序或以逻辑上可能的任何其它顺序进行。
[0046]
在本说明书中引用的所有出版物和专利都通过引用被并入本文,如同 每个单独的出版物或专利被特别且单独地指明通过引用并入一样,并且通 过引用被并入本文以公开和描述与出版物引用的方法和/或材料相关的方 法和/或材料。
[0047]
应注意的是,如在本文中和所附权利要求书中使用的,单数形式“一 (a)”、“一个(an)”以及“该(the)”包括复数引用对象,除非上下文另有 明确说明之外。
[0048]
系统
[0049]
本公开包括使用搅拌棒混合容纳在混合腔室中的样本同时将搅拌棒 和混合腔室的壁之间的接触量最小化的系统、装置和方法。根据主题实施 例的系统包括驱动磁体系统、从动磁体系统和容纳在混合腔室内的铁磁性 搅拌棒,驱动磁体系统、从动磁体系统和铁磁性搅拌棒彼此结合使用以混 合样本。铁磁性是能够在磁场中诱发偶极子的性质。
[0050]
图1是根据一个实施例的磁性混合设备100的示意图的断面图。磁性 混合设备包括包含一个或更多个驱动磁体的驱动磁体系统110、包含一个 或更多个从动磁体的从动磁体系统150以及混合腔室171。混合腔室设置 在驱动磁体系统和从动磁体系统之间的间隙内。混合腔室包括边界表面 172并容纳搅拌棒190。通常,但不是必须地,驱动磁体系统和从动磁体 系统将各自包含相同数量的磁体。类似地,通常磁体将以驱动磁体系统和 从动磁体系统布置,使得从动磁体系统中的每个磁体将定位成正对着或几 乎正对着在间隙对面
的驱动磁体系统中的对应磁体。
[0051]
在一些实施例中,驱动磁体系统和/或从动磁体系统包括单个单件式磁 体。例如,在图1所描绘的实施例中,驱动磁体系统包括单个驱动磁体111, 并且从动磁体系统包括单个从动磁体151。在替代实施例中,驱动磁体系 统和/或从动磁体系统可以包括多个磁体。例如,在图2所示并在下面更详 细讨论的实施例中,驱动磁体系统和从动磁体系统均包括两个或更多磁体。
[0052]
如图1所示,驱动磁体包括驱动磁体磁性轴线113。从动磁体也包括 磁性轴线,称为从动磁体磁性轴线153。这里使用的术语“磁性轴线”是 指穿过磁体中心的线,使得磁场沿该线的方向施加在磁体上的扭矩为零。 磁体将具有自己的磁性轴线。包括多于一个磁体的磁性系统也将具有其自 己的复合磁性轴线,使得磁场在该线的方向上施加在整个磁性系统上的扭 矩为零。为了可视化,图1示出了磁性轴线113和153分别与旋转轴线120 和160分开但平行。经常地,对于包括单个单件式磁体的磁性系统,单件 式磁体磁性轴线将与该磁体的旋转轴线大体上共线。
[0053]
在优选实施例中,驱动磁体的形状与从动磁体的形状相同。在更进一 步的优选实施例中,驱动磁体的尺寸与从动磁体的尺寸相同。例如,如图 1所描绘的实施例中所示,驱动磁体的形状和从动磁体的形状可以是矩形 棱柱。在另一优选实施例中,驱动磁体的最大尺寸在垂直于驱动磁体磁性 轴线的平面中,并且从动磁体的最大尺寸在垂直于从动磁体磁性轴线的平 面中。在另一优选实施例中,驱动磁体的最短尺寸与驱动磁体的最大尺寸 正交,从动磁体的最短尺寸与从动磁体的最大尺寸正交。在优选实施例中, 驱动磁体和/或从动磁体的最大尺寸与最短尺寸之比在20和5之间。
[0054]
驱动磁体系统和从动磁体系统被布置成实现一个或更多个驱动磁体 和一个或更多个从动磁体之间的磁性耦合。具体地,每个驱动磁体和从动 磁体相对于彼此布置,使得驱动磁体磁性轴线的对准和从动磁体磁性轴线 的对准实现了驱动磁体和从动磁体之间的磁性耦合。在某些实施例中,为 了实现驱动磁体和从动磁体之间的磁性耦合,从动磁体磁性轴线平行于驱 动磁体磁性轴线。在进一步的优选实施例中,从动磁体磁性轴线大体上与 对应的驱动磁体磁性轴线共线。如这里所使用的,“大体上共线”包含在 平分驱动磁体系统和从动磁体系统之间的间隙的平面处与绝对共线的偏 差最多为10
°
和/或3mm。
[0055]
驱动磁体系统和从动磁体系统之间的磁性耦合包括磁引力耦合。在这 样的实施例中,一个或更多个驱动磁体和一个或更多个从动磁体相对于彼 此布置,使得每个驱动磁体磁性轴线的对准和每个从动磁体磁性轴线的对 准实现了一个或更多个驱动磁体和一个或更多个从动磁体之间的磁引力 耦合。通常,为了实现驱动磁体和从动磁体之间的磁引力耦合,驱动磁体 磁性轴线和从动磁体磁性轴线对准,使得驱动磁体磁性轴线和从动磁体磁 性轴线的相反极定位成彼此靠近。例如,如图1所示,为了实现驱动磁体 和从动磁体之间的磁引力耦合,驱动磁体磁性轴线的第一极(例如,南极) 定位成靠近从动磁体磁性轴线的第二相反极(例如,北极)。在替代实施例 (未示出)中,为了实现驱动磁体和从动磁体之间的磁引力耦合,驱动磁体 磁性轴线的第二极(例如,北极)定位成靠近从动磁体磁性轴线的第一相反 极(例如,南极)。
[0056]
在某些实施例中,驱动磁体系统和从动磁体系统之间的磁性耦合强度 取决于位于一个或更多个驱动磁体和对应的一个或更多个从动磁体之间 的间隙的距离。另外,磁性
耦合取决于一个或更多个驱动磁体的磁体强度, 以及一个或更多个从动磁体的磁体强度。在一些实施例中,分开驱动磁体 和从动磁体的间隙在大约10mm和大约30mm之间。在另一个实施例中, 驱动磁体系统的剩余通量密度在5000高斯和40000高斯之间,从动磁体 系统的剩余通量密度在5000高斯和40000高斯之间。在优选实施例中, 一个或更多个驱动磁体的磁体强度与一个或更多个从动磁体的磁体强度 相同。
[0057]
如上所述,混合腔室设置在驱动磁体系统和从动磁体系统之间的间隙 内。在优选实施例中,混合腔室设置在间隙内,使得混合腔室的中心或中 点位于距驱动磁体系统和距从动磁体系统大约相等的距离处。混合腔室具 有混合腔室容积。边界表面围绕混合腔室容积。
[0058]
混合腔室容积内容纳至少一个搅拌棒。搅拌棒可以包括任何形状和/ 或体积。例如,搅拌棒的形状可以选自圆柱形、球形和三棱柱形组成的组。 搅拌棒通常在垂直于搅拌棒旋转轴线192的平面内具有最大尺寸194。搅 拌棒也具有与最大尺寸正交的最短尺寸。在优选实施例中,搅拌棒的最大 尺寸与最短尺寸之比在20和5之间。在一些实施方式中,搅拌棒可以是x 形搅拌棒,其基本上是两个杆状棒的组合物,每个杆状棒具有最大尺寸和 与最大尺寸正交的较窄的最短尺寸。这种x形搅拌棒可用于这样的驱动磁 体系统和从动磁体系统,其中每个系统包含一个、两个或四个磁体。在替 代实施例中,搅拌棒的形状可以从本文没有明确公开的任何其他三维形状 中选择。
[0059]
在一些实施例中,搅拌棒包括铁磁性材料。例如,搅拌棒可以包括铁 素体不锈钢或双相不锈钢。铁磁性材料是一种在磁场存在时表现出易磁化 性的材料。磁场去除后,磁化可能会持续,也可能不会持续。在某些实施 例中,搅拌棒具有500-1,000,000之间的相对磁导率。在磁场穿过铁磁性材 料的实施例中,材料的磁畴在磁场内对准,产生低磁导率区域,在该区域 磁场可以容易地穿过。磁通量沿着穿过铁磁性材料的最小阻抗的路径,并 且可以重新对准铁磁性材料以将磁阻最小化。可选地,不锈钢可以被钝化, 这从棒的表面去除游离铁,从而降低氧化的风险。
[0060]
搅拌棒可以封装在抗腐蚀的不渗透材料中。本领域的普通技术人员能 够选择合适的不渗透材料,该材料不会干扰通过搅拌棒的磁通量。示例材 料包括但不限于ptfe、聚对二甲苯c、聚对二甲苯d、官能化全氟聚醚 (pfpe)、fep、木聚糖含氟聚合物、环氧树脂和尿烷。类似地,不渗透材 料可以通过本领域已知的任何方法(例如通过滚涂)施加到搅拌棒上。在一 种实施方式中,搅拌棒的铁磁性材料在涂覆之前被钝化。在一个优选的实 施方式中,搅拌棒滚涂有一层20μm和200μm之间的厚度的聚对二甲苯c。
[0061]
通过将铁磁性搅拌棒放置在位于驱动磁体系统和从动磁体系统之间 的间隙中的混合腔室内,可以在搅拌棒上诱发磁偶极子。搅拌棒的偶极子 实现搅拌棒、一个或更多个驱动磁体和一个或更多个从动磁体之间的磁性 耦合。具体地,将搅拌棒引入磁场导致搅拌棒被吸引到一个或更多个驱动 磁体和一个或更多个从动磁体。在优选实施例中,其中对应的驱动磁体的 磁性强度等于从动磁体的磁性强度,并且驱动磁体磁性轴线与从动磁体磁 性轴线大体上共线,搅拌棒对驱动磁体和从动磁体的吸引导致搅拌棒定位 成与驱动磁体和从动磁体大致等距。在更进一步的优选实施例中,其中混 合腔室的中心位于距驱动磁体系统和距从动磁体系统相等的距离处,由于 搅拌棒和一个或更多个驱动磁体之间以及搅拌棒和一个或更多个从动磁 体之间的吸引力,搅拌棒可以在混合腔室内居中,从而将搅拌
棒和边界表 面之间的接触量最小化。
[0062]
另外,如上所述,搅拌棒在由驱动磁体系统和从动磁体系统产生的磁 场内对准,使得具有最大磁场强度的磁场区域尽可能穿过搅拌棒的最大体 积。在由驱动磁体系统和从动磁体系统产生的磁场重叠的区域中,由于这 种重叠而产生的总磁场包括具有平行磁场线的磁场。具体地,在由驱动磁 体和从动磁体产生的磁场重叠的区域中,产生的磁场由从驱动磁体穿过到 从动磁体以及从从动磁体穿过到驱动磁体的平行磁场线组成。搅拌棒在混 合腔室内对准,使得搅拌棒最大程度地被这些平行磁场线渗透。因此,搅 拌棒在混合腔室内对准,使得驱动磁体磁性轴线和从动磁体磁性轴线平行 于并穿过混合腔室边界允许的搅拌棒的最大尺寸。
[0063]
由于磁体系统的形状,磁场沿着驱动磁体系统和从动磁体系统的最大 尺寸最强。当沿平行于磁体系统最短尺寸的方向向外移动时,磁场强度迅 速下降。铁磁性搅拌棒被拉向允许最高磁通量通过其高渗透性体积的位置。 响应于驱动磁体系统和从动磁体系统的转动而导致搅拌棒转动的扭矩大 致与穿过搅拌棒的磁场的梯度成比例。
[0064]
在一些实施例中,驱动磁体系统被配置成围绕驱动磁体旋转轴线120 旋转。如图1所示,驱动磁体旋转轴线通常平行于驱动磁体磁性轴线。在 进一步的优选实施例中,驱动磁体旋转轴线可以与驱动磁体磁性轴线大体 上共线。在优选实施例中,驱动磁体系统相对于驱动磁体旋转轴线对称。
[0065]
在某些实施例中,驱动磁体系统的旋转可以通过将驱动磁体系统可操 作地联接到驱动磁体主轴121和将驱动磁体主轴可操作地联接到驱动马达 (如图3a所示)来实现。驱动磁体旋转轴线优选平行于驱动磁体主轴。更优 选地,驱动磁体旋转轴线大体上与驱动磁体主轴共线。在参照图3a-图5 更详细讨论的替代实施例中,一个或更多个驱动磁体安装在驱动磁体保持 器(图3a中示出)中,并且驱动磁体保持器被配置成围绕驱动磁体旋转轴线 旋转。在这样的实施例中,驱动磁体保持器的这种旋转可以通过将驱动磁 体保持器可操作地联接到驱动磁体主轴并且将驱动磁体主轴可操作地联 接到驱动马达来实现。在替代实施例中,磁性混合设备可以不包括驱动磁 体主轴。例如,在驱动磁体保持器为圆形形状的实施例中,驱动磁体系统 的旋转可以由外围驱动器产生。
[0066]
在进一步的实施例中,从动磁体系统被配置成围绕从动磁体旋转轴线 160旋转。如图1所示,从动磁体系统包括单个从动磁体,该单个从动磁 体具有平行于从动磁体磁性轴线的从动磁体旋转轴线。在这样的单个从动 磁体系统中,优选地,从动磁体旋转轴线大体上与从动磁体磁性轴线共线。 在优选实施例中,从动磁体系统相对于从动磁体旋转轴线对称。
[0067]
类似于驱动磁体系统,从动磁体系统可以可操作地联接到从动磁体主 轴161。通常,从动磁体旋转轴线平行于从动磁体主轴。在进一步的实施 例中,从动磁体旋转轴线可以与从动磁体主轴大体上共线。在参照图3a
‑ꢀ
图5更详细讨论的替代实施例中,一个或更多个从动磁体安装在从动磁体 保持器(图3a中示出)中,并且从动磁体保持器被配置成围绕从动磁体旋转 轴线旋转。在这样的实施例中,驱动磁体保持器可以可操作地联接到从动 磁体主轴。
[0068]
在某些实施例中,从动磁体旋转轴线平行于驱动磁体旋转轴线。从动 磁体旋转轴线也可以大体上与驱动磁体旋转轴线共线。从动磁体旋转轴线 和驱动磁体旋转轴线的共
线性是优选实施例,因为当驱动磁体和从动磁体 围绕其各自的轴线旋转时,通过将驱动磁体和从动磁体的对准最大化,该 共线性增强了驱动磁体系统和从动磁体系统之间的磁引力耦合的强度。
[0069]
由于驱动磁体系统和从动磁体系统之间的磁引力耦合,驱动磁体围绕 驱动磁体旋转轴线的旋转诱发从动磁体围绕从动磁体旋转轴线的旋转。具 体地,当驱动磁体系统围绕驱动磁体旋转轴线旋转时,从动磁体系统围绕 从动磁体旋转轴线旋转,使得一个或更多个驱动磁体和一个或更多个从动 磁体之间的磁引力耦合的强度最大化。如上面简要讨论的,为了将一个或 更多个驱动磁体和一个或更多个从动磁体之间的磁引力耦合的强度最大 化,一个或更多个从动磁体围绕从动磁体旋转轴线旋转,使得一个或更多 个驱动磁体中的每一个的磁性轴线和对应的一个或更多个从动磁体磁性 轴线的相反磁极定位成彼此靠近。具体地,为了将驱动磁体和从动磁体之 间的磁引力耦合的强度最大化,从动磁体绕从动磁体旋转轴线旋转,使得 从动磁体磁性轴线尽可能与对应的驱动磁体磁性轴线接近共线。
[0070]
搅拌棒也能够绕搅拌棒旋转轴线旋转。由于搅拌棒、驱动磁体系统和 从动磁体系统之间的磁性耦合,一个或更多个驱动磁体围绕驱动磁体旋转 轴线的旋转和一个或更多个从动磁体围绕从动磁体旋转轴线的旋转诱发 搅拌棒围绕搅拌棒旋转轴线旋转。
[0071]
基于驱动磁体磁性轴线和从动磁体磁性轴线的对准,搅拌棒围绕其旋 转的旋转轴线相对于搅拌棒对准。如上所述,搅拌棒在混合腔室内对准, 使得最大可能的磁通量穿过搅拌棒。为了最大化穿过搅拌棒的磁通量,边 界表面允许的搅拌棒的最大尺寸平行于驱动磁体磁性轴线和从动磁体磁 性轴线。为了在驱动磁体系统和从动磁体系统的旋转诱发搅拌棒的旋转时 保持穿过搅拌棒的最大磁通量,搅拌棒绕搅拌棒旋转轴线旋转,使得搅拌 棒的最大体积尽可能的保持在一个或更多个驱动磁体和一个或更多个从 动磁体之间形成的磁场的最强部分内。在一个优选实施例中,搅拌棒旋转 轴线大体上与驱动磁性系统的磁性轴线和从动磁性系统的磁性轴线共线。
[0072]
在最终优选的实施例中,驱动磁体磁性轴线、从动磁体磁性轴线、驱 动磁体旋转轴线、从动磁体旋转轴线和搅拌棒旋转轴线都大体上彼此共线。 这是一个优选实施例,因为它使得搅拌棒在混合腔室内大体上居中或“平 衡”,使得搅拌棒最低限度地接触混合腔室的边界表面。具体地,在优选 实施例中,搅拌棒位于混合腔室内,使得搅拌棒的旋转平面与驱动磁体系 统和从动磁体系统等距。搅拌棒的旋转平面垂直于搅拌棒的旋转轴线。在 另一个实施例中,搅拌棒的旋转平面平行于搅拌棒的最大尺寸。作为这种 等距的结果,在优选实施例中,搅拌棒最低限度地接触混合腔室的边界表 面。下面更详细地讨论减少搅拌棒和混合腔室的边界表面之间的接触量。
[0073]
在磁性混合设备的某些实施例中,用于在混合期间检测搅拌棒从驱动 磁体系统和/或从动磁体系统的磁解耦的声学机构可以可选地包括在磁性 混合设备中。随着搅拌棒旋转,搅拌棒的角速度增加,旋转搅拌棒产生的 振动振幅增加。如果搅拌棒与驱动磁体系统和从动磁体系统解耦,由旋转 搅拌棒产生的振动振幅会突然减小,通常是紧接在几声敲击之后。
[0074]
在一些实施例中,用于检测搅拌棒的解耦的机构可以是麦克风(未示 出)。在优选实施例中,麦克风是定向型的,并且集中在混合组件上。然而, 在替代实施例中,麦克风可
以是非定向型的,并且被简单地放置成靠近混 合组件。
[0075]
在某些实施例中,来自搅拌棒的音频输出可以被带通滤波,使得仅某 些相关频率被测量。此外,在一些实施例中,针对给定的磁性混合组件, 可以通过实验确定与解耦事件相关联的确切频率和振幅,并且麦克风可以 使用该频率和振幅来检测搅拌棒的解耦。
[0076]
在替代实施例中,作为对使用麦克风的替换,用于检测搅拌棒解耦的 机构可以是附接到混合组件的加速度计(未示出)。加速度计可用于检测搅 拌棒解耦时出现的振幅突然下降。
[0077]
图2是根据一个实施例的磁性混合设备200的示意图的断面图。磁性 混合设备包括驱动磁体系统210和从动磁体系统250。在图2所描绘的实 施例中,驱动磁体系统包括以横切驱动磁体旋转轴线220的距离分开的第 一驱动磁体211和第二驱动磁体216,并且从动磁体系统包括以横切从动 磁体旋转轴线260的距离分开的第一从动磁体251和第二从动磁体256。
[0078]
第一驱动磁体、第二驱动磁体、第一从动磁体和第二从动磁体均具有 磁性轴线。具体地,第一驱动磁体具有第一驱动磁体磁性轴线213,第二 驱动磁体具有第二驱动磁体磁性轴线218,第一从动磁体具有第一从动磁 体磁性轴线253,第二从动磁体具有第二从动磁体磁性轴线258。在优选 实施例中,第一驱动磁体磁性轴线和第二驱动磁体磁性轴线彼此平行,并 且第一从动磁体磁性轴线和第二从动磁体磁性轴线彼此平行。在更进一步 的优选实施例中,第一驱动磁体磁性轴线、第二驱动磁体磁性轴线、第一 从动磁体磁性轴线和第二从动磁体磁性轴线彼此平行。在最终优选实施例 中,第一驱动磁体磁性轴线和第一从动磁体磁性轴线大体上彼此共线,第 二驱动磁体磁性轴线和第二从动磁体磁性轴线大体上彼此共线。在另一个 优选实施例中,第一驱动磁体的极相对于第一驱动磁体磁性轴线布置成与 第二驱动磁体的极相对于第二驱动磁体磁性轴线的布置相同。类似地,在 优选实施例中,第一从动磁体的极相对于第一从动磁体磁性轴线布置成与 第二从动磁体的极相对于第二从动磁体磁性轴线的布置相同。在另一优选 实施例中,第一驱动磁体的磁体强度等于第二驱动磁体的磁体强度,并且 第一从动磁体的磁体强度等于第二从动磁体的磁体强度。在更进一步的优 选实施例中,第一驱动磁体、第二驱动磁体、第一从动磁体和第二从动磁 体的磁体强度都相同。
[0079]
当分开一段距离时,第一驱动磁体和第二驱动磁体可以包括任何形状 和/或尺寸。类似地,当分开一段距离时,第一从动磁体和第二从动磁体可 以包括任何形状和/或尺寸。在优选实施例中,第一驱动磁体的形状与第二 驱动磁体的形状相同,并且第一从动磁体的形状与第二从动磁体的形状相 同。在另一优选实施例中,第一驱动磁体的形状、第二驱动磁体的形状、 第一从动磁体的形状和第二从动磁体的形状都是相同的。例如,在图2所 描绘的实施例中,第一驱动磁体、第二驱动磁体、第一从动磁体和第二从 动磁体均包括立方体。在另外的优选实施例中,第一驱动磁体的尺寸与第 二驱动磁体的尺寸相同,并且第一从动磁体的尺寸与第二从动磁体的尺寸 相同。在另一优选实施例中,第一驱动磁体、第二驱动磁体、第一从动磁 体和第二从动磁体的尺寸都是相同的。
[0080]
在优选实施例中,第一驱动磁体与第二驱动磁体位于距离驱动磁体旋 转轴线大约相等的距离处。类似地,在优选实施例中,第一从动磁体与第 二从动磁体位于距离从动磁体旋转轴线大约相等的距离处。在另一个优选 实施例中,第一驱动磁体、第二驱动磁体、
第一从动磁体和第二从动磁体 都位于离它们各自的旋转轴线相等的距离处。这是一个优选实施例,因为 它使磁体能够相对于它们的旋转轴线产生对称的磁场。在另一个优选实施 例中,第一驱动磁体与第二驱动磁体位于距离混合腔室271大约相等的距 离处。类似地,在优选实施例中,第一从动磁体与第二从动磁体位于距离 混合腔室大约相等的距离处。在另一个优选实施例中,第一驱动磁体、第 二驱动磁体、第一从动磁体和第二从动磁体都位于距混合腔室相等的距离 处。这是一个优选实施例,因为它使磁体能够相对于混合腔室产生对称的 磁场。
[0081]
在驱动磁体系统和从动磁体系统的实施例中,其中驱动磁体系统包括 第一驱动磁体和第二驱动磁体,并且从动磁体系统包括分开一定距离的第 一从动磁体和第二从动磁体,驱动磁体系统的最大尺寸是从第一驱动磁体 的外边缘到第二驱动磁体的外边缘的距离,包括任何中间间隔件,并且从 动磁体系统的最大尺寸包括从第一从动磁体的外边缘到第二从动磁体的 外边缘的距离,包括任何中间间隔件。如关于图1或图2所述,驱动磁体 系统的最大尺寸通常在垂直于驱动磁性系统的旋转轴线的平面内。类似地, 从动磁体系统的最大尺寸通常在垂直于从动磁体系统的旋转轴线的平面 内。驱动磁体系统的最短尺寸与驱动磁体系统的最大尺寸正交,从动磁体 系统的最短尺寸与从动磁体系统的最大尺寸正交。在一些实施例中,驱动 磁体系统包括间隔件,该间隔件桥接第一驱动磁体和第二驱动磁体之间的 距离,并连接第一驱动磁体和第二驱动磁体。在这样的实施例中,间隔件 横切驱动磁体旋转轴线。在进一步的实施例中,从动磁体系统包括间隔件, 该间隔件桥接第一从动磁体和第二从动磁体之间的距离,并连接第一从动 磁体和第二从动磁体。在这样的实施例中,间隔件横切从动磁体旋转轴线。 在包括三个或更多个磁体的系统中,本领域技术人员将理解,间隔件的几 何形状可适于能够桥接多于两个点并与驱动磁体主轴或从动磁体主轴相 交。
[0082]
连接第一驱动磁体和第二驱动磁体和/或连接第一从动磁体和第二从 动磁体的间隔件可以采取任何形式。例如,如图4所示,第一驱动磁体和 第二驱动磁体可以安装并保持在驱动磁体保持器425中,并且第一从动磁 体和第二从动磁体可以安装并保持在从动磁体保持器465中。
[0083]
在一些实施例中,驱动磁体主轴221位于第一驱动磁体和第二驱动磁 体之间,和/或从动磁体主轴261位于第一从动磁体和第二从动磁体之间。 在间隔件将第一驱动磁体连接到第二驱动磁体并且将第一从动磁体连接 到第二从动磁体的实施例中(如图2所示),驱动磁体主轴和从动磁体主轴 可以连接到相应的间隔件。
[0084]
装置
[0085]
图3a是根据本公开的磁性混合设备300的一个实施例的图示。如图 3a所示,磁性混合设备包括驱动磁体保持器325、从动磁体保持器365以 及位于驱动磁体保持器和从动磁体保持器之间的间隙。在一些实施例中, 驱动磁体系统(在一些实施例中为图1的单个第一驱动磁体,和在替代实施 例中为多于一个驱动磁体,例如图2的第一驱动磁体和第二驱动磁体)安装 在驱动磁体保持器内,并且从动磁体系统(在一些实施例中为图1的单个第 一从动磁体,和在替代实施例中为多于一个从动磁体,例如图2的第一从 动磁体和第二从动磁体)安装在从动磁体保持器内。根据关于图1和图2讨 论的实施例,驱动磁体保持器将驱动磁体系统保持在静止位置,并且从动 磁体保持器将从动磁体系统保持在静止位置。在
优选实施例中,驱动磁体 保持器包括与从动磁体保持器相同的规格(例如,形状、尺寸、材料成分和 /或重量)。在优选实施例中,驱动磁体保持器和从动磁体保持器在间隙的 对面彼此对准,该间隙被配置成容纳混合腔室。
[0086]
同样如以上关于图1和图2所讨论的,在一些实施例中,驱动磁体系 统被配置成围绕驱动磁体旋转轴线旋转。在驱动磁体系统安装在驱动磁体 保持器内的实施例中,驱动磁体保持器可以被配置成围绕驱动磁体旋转轴 线旋转。例如,驱动磁体保持器可以可操作地联接到驱动马达330,该驱 动马达330能够驱动驱动磁体保持器围绕驱动磁体旋转轴线旋转。在进一 步的实施例中,驱动磁体保持器可以机械地联接到驱动马达。驱动马达可 以与驱动磁体保持器成一直线并直接驱动驱动磁体保持器旋转。可选地, 驱动马达可以间接地但可操作地联接到驱动磁体主轴。在这样的实施例中, 驱动磁体主轴可以可操作地和/或机械地联接到传动带332,传动带332又 可以可操作地和/或机械地联接到驱动马达,驱动马达能够驱动驱动磁体保 持器围绕驱动磁体旋转轴线旋转。当联接到驱动马达时,传动带能够旋转 驱动磁体主轴,使得可操作地联接到驱动磁体主轴的驱动磁体保持器旋转。
[0087]
在替代实施例中,驱动磁体系统不安装在驱动磁体保持器内。相反, 驱动磁体系统本身可以可操作地和/或机械地联接到驱动马达。如上所述, 驱动磁体系统和驱动马达之间的这种可操作的和/或机械的联接可以通过 传动带和/或驱动磁体主轴来实现。
[0088]
同样如以上关于图1和图2所讨论的,从动磁体系统被配置成围绕从 动磁体旋转轴线旋转。在从动磁体系统安装在从动磁体保持器内的实施例 中,从动磁体保持器可以被配置成围绕从动磁体旋转轴线旋转。在一些实 施例中,从动磁体保持器可以可操作地联接到从动磁体主轴。在这样的实 施例中,从动磁体主轴可以与从动磁体旋转轴线大体上共线。
[0089]
在某些实施例中,混合组件保持器340设置在驱动磁体保持器和从动 磁体保持器之间的间隙内。关于图3b,将更详细地讨论被配置成被保持在 混合组件保持器内的静止位置的混合组件。在替代实施例中,没有混合组 件保持器,并且混合组件本身直接设置在驱动磁体保持器和从动磁体保持 器之间的间隙中。
[0090]
图3b是根据本公开主题的实施例的混合组件370的图解;如图3b所 示,混合组件包括混合腔室371、搅拌棒390、样本装填槽383、样本转移 通道386、空气通道382和珠粒过滤通道387。在混合组件的替代实施例 中,例如关于图8a-图8d讨论的那些,混合组件可以包括另外的流体通 道和/或空气通道。在某些实施例中,混合组件被配置为一次性的。在替代 实施例中,混合组件被配置成可消毒的,例如利用漂白剂和/或替代清洁材 料,以允许多次使用。
[0091]
样本装填槽被配置成从样本入口(图8a所示)接收流体样本,并在将流 体样本转移到混合腔室之前容纳流体样本。在一些实施例中,混合腔室容 纳第一液体,例如溶解缓冲液,同时样本腔室容纳流体样本。在一些实施 例中,流体样本包括一个或更多个细胞。样本转移通道被配置成将流体样 本从样本装填槽输送到混合腔室中。空气出口被配置成在空气端口和空气 通道之间转移空气。空气通道在空气出口和混合腔室之间转移空气。如关 于图8a-图8d更详细讨论的,空气通道内的空气压力控制混合组件的操 作,并且具体地控制流体进出混合腔室。
[0092]
在一些实施例中,混合腔室还包括珠粒(如图8a-图8d所示)。在被转 移到混合腔
室的流体样本包括一个或更多个细胞的实施例中,将流体样本 与珠粒混合促进了一个或更多个细胞的溶解。将流体样本与珠粒混合后, 将流体样本从混合腔室中移出。在一个优选实施例中,结合样本从混合腔 室中移出,珠粒与流体样本分开。为了将珠粒与流体样本分开,在一些实 施例中,珠粒过滤通道被附加到混合腔室。珠粒过滤通道沿着混合腔室的 边缘定位,并且被配置为在允许流体样本流出的同时将珠粒保持在混合腔 室中。具体地,在优选实施方式中,每个珠粒过滤通道的横截面积包括第 一尺寸和第二尺寸,第一尺寸使得珠粒太大而不能进入珠粒过滤通道,第 二尺寸使得珠粒不能阻挡流体流动。以这种方式,珠粒过滤通道的使用使 得流体能够在没有珠粒的情况下从混合腔室中抽出。
[0093]
图4是根据一个实施例的磁性混合设备400的分解图的图解。在图4 所示的实施例中,驱动磁体系统410包括以一定距离分开的第一驱动磁体 411和第二驱动磁体416,并且从动磁体系统450包括以一定距离分开的第 一从动磁体451和第二从动磁体456,如图2所示的。
[0094]
如以上关于图1所讨论的,在由驱动磁体系统和从动磁体系统产生的 磁场重叠的区域中,由于这种重叠而产生的总磁场包括具有平行磁场线的 磁场。具体而言,在由驱动磁体系统和从动磁体系统产生的磁场重叠的区 域中,产生的磁场由从驱动磁体系统穿过到从动磁体系统以及从从动磁体 系统穿过到驱动磁体系统的平行磁场线组成。
[0095]
为了增加搅拌棒的扭矩,磁性混合设备的某些实施例可以包括一个或 更多个场聚焦器。优选地,场聚焦器联接到一个或更多个驱动磁体或一个 或更多个从动磁体中的至少一个,并且被定位成将由驱动磁体系统和从动 磁体系统产生的磁场沿着驱动磁性系统和从动磁性系统的最大尺寸朝向 狭窄的径向段聚焦。场聚焦器可以联接到驱动磁体系统和/或从动磁体系统 的一个或更多个磁体,并且使跨过间隙的磁场梯度变陡。场聚焦器将由驱 动磁体系统和从动磁体系统产生的磁场集中到较小的横截面积,从而增加 通过搅拌棒的磁通量。通过使磁场梯度变陡,场聚焦器增加了在搅拌棒旋 转期间搅拌棒上的潜在扭矩。图5中描绘了已经由场聚焦器转换的驱动磁 体系统和从动磁体系统的磁场线。在没有场聚焦器的情况下,大约相等的 磁体强度将分布在磁体(例如511)的面的较大区域上。
[0096]
如图4所示,驱动磁体系统和从动磁体系统可以各自联接到场聚焦器。 例如,在图4所描绘的磁性混合设备的实施例中,第一驱动磁体、第二驱 动磁体、第一从动磁体和第二从动磁体均联接到场聚焦器。具体地,第一 驱动磁体联接到第一驱动磁场聚焦器412,第二驱动磁体联接到第二驱动 磁场聚焦器417,第一从动磁体联接到第一从动磁场聚焦器452,第二从 动磁体联接到第二从动磁场聚焦器457。在驱动磁体系统和从动磁体系统 包括单件式磁体的替代实施例中(如图1所示),单个场聚焦器可以联接到 单个驱动磁体和单个从动磁体中的每一个。
[0097]
在某些实施例中,场聚焦器由铁组成。铁对磁场是可渗透的,这意味 着由驱动磁体系统和/或从动磁体系统产生的磁场可以穿过联接到驱动磁 体系统和/或从动磁体系统的铁场聚焦器。在进一步的实施例中,场聚焦器 是三棱柱形的。在场聚焦器联接到驱动磁体系统和从动磁体系统的实施例 中,场聚焦器被定位成将由驱动磁体系统和从动磁体系统产生的磁场朝向 混合腔室的中心聚焦。这些磁场梯度将搅拌棒限制在混合腔室的中心。在 磁性混合设备中对场聚焦器的使用是可选的。在替代实施例中,磁性混合 设备不包括场聚焦器。
[0098]
图5是根据一个实施例的磁性混合设备500的断面图的图解。具体而 言,图5包括驱动马达530、传动带532、驱动磁体主轴521、驱动磁体保 持器525、混合组件570、从动磁体保持器565和从动磁体主轴561,其被 布置成混合容纳在混合组件的混合腔室571内的样本。如图5所示,驱动 马达可操作地/机械地联接到传动带,传动带可操作地/机械地联接到驱动 磁体主轴,驱动磁体主轴进而可操作地联接到驱动磁体保持器。驱动磁体 保持器容纳驱动磁体系统510(在一些实施例中,第一驱动磁体511和第二 驱动磁体(未示出))。如上所讨论的,驱动磁体保持器定位成靠近混合组件 的第一面,使得驱动磁体保持器与混合腔室对准。从动磁体保持器定位成 靠近混合组件的与第一面相对的第二面,使得从动磁体保持器也在混合腔 室内对准,并且使得混合腔室位于驱动磁体保持器和从动磁体保持器之间。 从动磁体保持器容纳从动磁体系统550(在一些实施例中,第一从动磁体 551和第二从动磁体(未示出))。最后,从动磁体保持器可操作地联接到从 动磁体主轴。
[0099]
如以上关于图4所讨论的,在某些实施例中,例如图5所示的实施例, 第一驱动磁场聚焦器512可以联接到第一驱动磁体和/或第一从动磁场聚 焦器552可以联接到第一从动磁体。第一驱动磁场聚焦器和第一从动磁场 聚焦器转换由第一驱动磁体和第一从动磁体产生的磁场线,以产生图5所 示的磁场线575。如上所讨论的,磁场线包括梯度图案(gradient pattern), 在磁体的外部边缘附近具有最低的磁场强度,在磁体的中心573附近具有 最大的磁场强度。
[0100]
转向驱动磁体保持器和从动磁体保持器的对准,在一些实施例中,驱 动磁体保持器和从动磁体保持器位于距混合腔室中心大约相等的距离处。 例如,驱动磁体保持器和从动磁体保持器均可位于距混合腔室中心7mm 的距离处。在进一步的实施例中,驱动磁体系统和从动磁体系统可以位于 距混合腔室中心相等的距离处。例如,驱动磁体系统和从动磁体系统均可 位于距混合腔室中心7mm的距离处。在更进一步的实施例中,第一驱动 磁场聚焦器和第一从动磁场聚焦器可以位于距混合腔室中心相等的距离 处。例如,第一驱动磁场聚焦器和第一从动磁场聚焦器均可位于距混合腔 室中心7mm的距离处。
[0101]
图6是根据一个实施例的混合组件670的断面图的横截面的图解。具 体地,图6描绘了位于混合腔室671内的搅拌棒690。注意,混合腔室的 边界表面672a和672b不需要在混合腔室的所有面上都为均匀的厚度。在 一些实施方式中,希望加热或冷却混合腔室的内容物。因此,在某些实施 例中,混合腔室的一个壁(例如边界表面672b)相对较薄并且导热。在混合 腔室的边界表面较薄的实施例中,支撑板(未示出)可定位成邻近薄的边界 表面,以支撑旋转搅拌棒和/或混合腔室的加压填充(参照图8a-图8d讨论)。 支撑板的实施例在图7中描绘,并在下面更详细地讨论。
[0102]
如上关于图1所述,在优选实施例中,搅拌棒最低限度地接触混合腔 室的边界表面。在某些实施例中,为了避免搅拌棒和边界表面之间的接触, 混合腔室和搅拌棒的尺寸成比例,使得搅拌棒很少接触混合腔室的边界表 面。
[0103]
在进一步的实施例中,为了进一步避免搅拌棒和混合腔室的边界表面 之间的接触,混合腔室的最大尺寸将大于搅拌棒的最大尺寸694。例如, 在某些实施例中,混合腔室的最大尺寸可以比搅拌棒的最大尺寸大 1mm-10mm。例如,在某些实施例中,混合腔室容积的最大尺寸可以包括 在1mm-200mm之间。在优选实施例中,混合腔室容积的最大尺寸选自包 括大约2-100mm、大约10-80mm和大约20-30mm的组。在进一步的实施 例中,搅拌棒的最
大尺寸在0.5mm-180mm之间。在优选实施例中,搅拌 棒的最大尺寸选自包括大约1-100mm、大约3-50mm、大约5-30mm的组。
[0104]
在一些实施例中,搅拌棒不接触混合腔室的边界表面。在替代实施例 中,搅拌棒可以接触混合腔室的边界表面,但是比存在驱动磁体系统但不 存在从动磁体系统的情况更少发生。
[0105]
在某些实施例中,混合腔室的容积可以包括在0.1ml-100ml之间。在 一个优选实施例中,混合腔室容积选自包括约1-20ml、约2-10ml和约 3-6ml的组。在另一个实施例中,搅拌棒体积可以包括在50ul-10ml之间。 在一个优选实施例中,搅拌棒体积选自包括小于1ml、约0.1-0.8ml和约 0.3-0.5ml的组。
[0106]
图7示出了根据一个实施例的支撑板776。如以上关于图6所讨论的, 在某些实施例中,支撑板可以定位成邻近混合腔室的一个或更多个薄的边 界表面,以支撑混合腔室内搅拌棒的旋转和/或对混合腔室的加压。支撑板 位于驱动磁体系统和从动磁体系统之间的间隙内。
[0107]
为了能够将热量传导到混合腔室和从混合腔室传导出去,支撑板可以 包括导热材料,该导热材料可以被加热和/或冷却,以便加热和/或冷却混 合腔室的内容物。例如,在某些实施例中,支撑板可以包括铝。在支撑板 包括传导材料的这些实施例中,旋转磁体可以在支撑板中诱发涡电流。具 体地,当一个或更多个磁体围绕垂直于导电平面(诸如支撑板)的轴线(例 如,驱动磁体旋转轴线和/或从动磁体旋转轴线)旋转时,可以在导电平面 中产生涡电流。这些涡电流有可能与一个或更多个旋转磁体相互作用并在 一个或更多个旋转磁体上产生拖曳力。这种拖曳力会导致在一个或更多个 旋转磁体之间传递扭矩的损失。例如,驱动磁体系统和/或从动磁体系统上 的拖曳力会导致从驱动磁体系统到从动磁体系统和/或搅拌棒的传递扭矩 的损失。这种传递扭矩的损失会导致一个或更多个旋转磁体解耦,特别是 在高的旋转角速度(speeds of angular rotation)下。具体而言,传递扭矩的 损失会导致从动磁体系统与驱动磁体系统解耦。
[0108]
为了限制对支撑板中涡电流的诱发,并因此限制一个或更多个旋转磁 体的解耦,在一些实施例中(例如图7所描绘的实施例),支撑板可以可选 地包括多个穿孔777。在本公开中讨论的磁性混合设备的实施例中,驱动 磁体系统和从动磁体系统以圆形图案旋转。这样,由旋转磁体系统在支撑 板中诱发的涡电流从圆形图案的中心773径向诱发。为了限制对支撑板中 涡电流的诱发,多个穿孔可以围绕磁体系统的旋转的圆形图案的中心以同 心图案布置。换句话说,多个穿孔可以与混合腔室和/或容纳在混合腔室内 的搅拌棒同心布置。多个穿孔的这种同心布置导致在支撑板中诱发的涡电 流沿着它们的径向诱发路径遵循盘旋路径行进。这种盘旋的路径限制了支 撑板中涡电流的形成。通过限制对支撑板中涡电流的诱发,由涡电流造成 的旋转磁体系统上的阻力被限制在阈值以下,该阻力将干扰驱动磁体系统、 从动磁体系统和搅拌棒的有效耦合。
[0109]
方法
[0110]
图8a-图d示出了根据本发明实施例的在混合组件870上实施的一种 示例性混合方法。如图8a-图8d所示的实施例中所示,混合组件包括由 边界表面872包围的混合腔室871。混合腔室容纳搅拌棒890和可选的多 个珠粒874。为了便于装填样本,图8a-图8d所示的混合组件还包括样本 装填槽883和样本转移通道886。样本转移通道连接样本装填槽和
混合腔 室。本领域技术人员将理解,该方法的正确操作不需要单独的装填槽,并 且样本可以通过各种流体系统和样本源中的任何一种直接输送到混合腔 室中。腔室装载通道885允许将试剂(包括例如溶解溶液或珠粒)引入混合 腔室,而不与样本腔室中的样本相互作用。对流体运动的气动控制由通过 空气通道882提供的气压提供。
[0111]
图8a示出了根据一个实施例的使用混合组件执行的混合过程的第一 步骤。将样本装载到样本入口881中,并将溶解缓冲液装载到腔室装载通 道中。在一些实施例中,样本包括一个或更多个细胞。在一些实施例中, 溶解缓冲液包括一种或更多种化学溶解剂,包括但不限于低渗溶液,和/ 或含有有机溶剂(如乙醇、乙醚或氯仿)、螯合剂(如乙二胺四乙酸(edta))、 表面活性剂(如曲拉通或十二烷基硫酸钠(sds))和/或离液剂(如尿素或胍) 的溶液。在某些实施例中,在使用混合组件之前,溶解缓冲液可以预先装 载到混合腔室中,并在混合腔室内长时间储存。溶解溶液、样本和可选的 珠粒的添加顺序不会对本文所述方法产生不利影响。
[0112]
图8b示出了根据一个实施例的使用混合组件执行的混合过程的第二 步骤。如图8b所示,样本位于样本装填槽中。空气通道是开放的,空气 被迫通过空气通道并且进入样本装填槽。在一些实施例中,空气具有20psi 的气压。样本入口关闭,使得流体(包括来自空气通道的空气和/或位于样 本装填槽中的样本)不能通过样本入口从样本装填槽中离开。结果,样本装 填槽内的压力增加。样本装填槽内压力的增加导致样本被推出样本装填槽, 进入样本转移通道,最后进入混合腔室。腔室装载通道和样本出口通道888 被关闭,使得流体(例如溶解缓冲液和位于混合腔室内的样本)不能从混合 腔室中离开。
[0113]
图8c示出了根据一个实施例的使用混合组件执行的混合过程的第三 步骤。如图8c所示,样本和溶解缓冲液位于混合腔室内。样本装填槽中 的气压保持恒定压力。样本入口、腔室装载通道和样本出口通道888保持 关闭,使得流体(例如溶解缓冲液和位于混合腔室内的样本)不能从混合腔 室中离开。结果,样本和溶解缓冲液保持封闭在混合腔室内。
[0114]
如图8c所示,搅拌棒响应于驱动磁体系统和从动磁体系统的耦合旋 转而旋转。在一些实施例中,搅拌棒的旋转是通过给可操作地联接到驱动 磁体系统的驱动马达供能而造成的,从而诱发驱动磁体系统的旋转。进而, 驱动磁体系统磁力耦合到从动磁体系统,因此驱动磁体系统的旋转诱发从 动磁体系统的旋转。另外,驱动磁体系统和从动磁体系统都可操作地联接 到搅拌棒。因此,在一些实施例中,驱动磁体系统的旋转和从动磁体系统 的旋转诱发搅拌棒的旋转,如图8c所示。搅拌棒的这种旋转将样本和位 于混合腔室内的溶解缓冲液混合。在样本包括一个或更多个细胞的实施例 中,样本和溶解缓冲液的混合促进了一个或更多个细胞的溶解。在进一步 的实施例中,位于混合腔室内的多个珠粒进一步促进一个或更多个细胞的 溶解。
[0115]
图8d示出了根据一个实施例的使用混合组件执行的混合过程的第四 步骤。如图8d所示,搅拌棒的旋转已经停止,样本和溶解缓冲液位于混 合腔室内。在一些实施例中,在图8d中,作为图8c所示混合的结果,样 本包括溶解的样本。
[0116]
如图8d中进一步所示,空气通道是开放的,并且气动压力被施加到 空气通道并进入样本装填槽。样本入口和腔室装载通道保持关闭,使得流 体(例如,混合的溶解缓冲液和样本)不能通过样本入口和/或腔室装载通道 从混合腔室中离开。但是,样本出口通道888现在是打开的。由于来自空 气通道的正气压,溶解的样本可以通过样本出口通道888从混
[0126]
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1