一种生物科技实验样品处理装置的制作方法
1.本发明涉及生物科技技术领域,具体为一种生物科技实验样品处理装置。
背景技术:
2.生物技术(biotechnology),是指人们以现代生命科学为基础,结合其他基础科学的科学原理,采用先进的科学技术手段,按照预先的设计改造生物体或加工生物原料,为人类生产出所需产品或达到某种目的,生物技术是人们利用微生物、动植物体对物质原料进行加工,以提供产品来为社会服务的技术,它主要包括发酵技术和现代生物技术,因此,生物技术是一门新兴的,综合性的学科,现代生物技术综合基因工程、分子生物学、生物化学、遗传学、细胞生物学、胚胎学、免疫学、有机化学、无机化学、物理化学、物理学、信息学及计算机科学等多学科技术,可用于研究生命活动的规律和提供产品为社会服务等,由于生物实验经常用到实验鼠,但由于鼠笼外部的坏境相对鼠笼中要不可控一些,一旦实验鼠逃逸等实验事故发生,逃逸的老鼠即使能够确定来源,也有可能不再可以反映正确的实验结果,且容易感染了病原然后再传染给同笼的老鼠,导致实验作废,因此一旦发现逃逸需要进行处理;
3.现有技术领域内,逃逸后的活体实验鼠采用注射安乐死等药物进行处理,但成本较高,或采用刀具等进行处理,操作员难以进行操作,针对上述问题,现设计一种生物科技实验样品处理装置。
技术实现要素:
4.本发明的目的在于提供一种生物科技实验样品处理装置,以至少解决现有技术的逃逸后的活体实验鼠采用注射安乐死等药物进行处理,但成本较高,或采用刀具等进行处理,存在人道主义等心理因素,导致操作员难以进行操作,针对上述问题,现设计一种生物科技实验样品处理装置的问题。
5.为实现上述目的,本发明提供如下技术方案:一种生物科技实验样品处理装置,包括:壳体、控制器、存储机构、处理机构、焚烧炉和气泵;
6.控制器安装在所述壳体的顶端后侧;存储机构内嵌在所述壳体的顶端左前方;处理机构内腔在所述壳体的内腔且位于存储机构的右侧;焚烧炉内嵌在所述壳体的内腔且位于处理机构的后侧,所述焚烧炉和控制器电性连接;气泵安装在所述壳体的外侧,所述气泵和控制器电性连接。
7.优选的,所述存储机构包括:存储机构筒体、转动板、第一电机、第一皮带轮、第二皮带轮、传送管道、存储机构壳体、负压风机、推动模块和推板;存储机构筒体内嵌在所述壳体的内腔;转动板通过轴承转动连接在所述存储机构筒体的内腔,所述转动板的轴心延伸出存储机构筒体的底端;第一电机设置在所述存储机构筒体的外侧,所述第一电机和控制器电性连接;第一皮带轮螺钉连接在所述第一电机的输出端;第二皮带轮螺钉连接在所述转动板的轴心底端,所述第二皮带轮和第一皮带轮通过皮带传动连接;传送管道一端设置
在所述存储机构筒体的内腔侧壁开口处;存储机构壳体设置在所述壳体的内腔,所述传送管道的另一端延伸进存储机构壳体的内腔;负压风机设置在所述存储机构壳体的内腔底端右侧开口处,所述负压风机和控制器电性连接;推动模块设置在所述存储机构壳体的内腔左侧,所述推动模块和控制器电性连接;推板安装在所述推动模块的伸缩端。
8.优选的,所述推板的形状为l形。
9.优选的,所述处理机构包括:处理机构壳体、笼体、底板、刺激组件、转动座、电推杆、第二连接座、移动机械臂和系簧枪;处理机构壳体沿前后方向设置在所述壳体的内腔;笼体设置在所述处理机构壳体的底端且位于焚烧炉的进口处,所述存储机构壳体的内腔与笼体的内腔相贯通;底板通过轴承转动连接在所述笼体的内腔底端开口处左侧;所述刺激组件的数量为两组,每组所述刺激组件的数量为四个,两组所述刺激组件分别从前至后间隙内嵌在的内侧左右两端;转动座安装在所述处理机构壳体的内腔右侧;所述电推杆的数量为两个,两个所述电推杆的一端通过转动连接在所述转动座的内侧前后两端,所述电推杆和控制器电性连接;所述第二连接座的数量为两个,两个所述第二连接座分别设置在底板的顶端右侧前后来两端,前后两个所述电推杆的另一端分别与前后两个第二连接座的内侧通过销轴转动连接;移动机械臂设置在所述处理机构壳体的内腔右侧底端,所述移动机械臂和控制器电性连接;系簧枪安装在所述移动机械臂的移动端,所述系簧枪的进气口与气泵通过导管相连接;其中,所述笼体的左右两外侧设置有密封组件,所述笼体的内内腔中心位置设置有固定组件。
10.优选的,所述密封组件包括:导轨、限位滑块、密封板、限位滑槽、连接架、丝杠螺母杆、丝杠螺杆、第一锥形齿轮、第一转轴、第二锥形齿轮和第三锥形齿轮;所述导轨的数量为两组,每组所述导轨的数量为两个,两个所述导轨分别沿上下方向设置在笼体的外侧前后两端;所述限位滑块的数量为两组,每组所述限位滑块的数量为两个,两组所述限位滑块分别插接在左右两组导轨的内腔;所述密封板的数量为两个,两个所述密封板设置在左右两组前后两个限位滑块的内侧;所述限位滑槽的数量为两个,两个所述限位滑槽分别开设在处理机构壳体的内腔左右两侧中心位置;所述连接架的数量为两个,两个所述连接架分别插接在左右两个限位滑槽的内腔,两个所述连接架的一端分别与左右两个密封板的顶端固定连接;所述丝杠螺母杆的数量为两个,两个所述丝杠螺母杆分别通过轴承转动连接在所述处理机构壳体的内腔底端左右两侧;所述丝杠螺杆的数量为两个,两个所述丝杠螺杆分别螺接在左右两个丝杠螺母杆的内腔,左右两个所述连接架的另一端与左右两个丝杠螺杆的外侧通过轴承转动连接;所述第一锥形齿轮的数量为两个,两个所述第一锥形齿轮分别键连接在左右两个丝杠螺母杆的外壁;第一转轴沿左右方向通过轴承转动连接在所述处理机构壳体的内腔;所述第二锥形齿轮的数量为两个,两个所述第二锥形齿轮分别键连接在第一转轴的左右两端;第三锥形齿轮键连接在所述第一转轴的外壁中心位置。
11.优选的,所述固定组件包括:第二转轴、第四锥形齿轮、第一齿轮、转动盘、连杆、固定座、夹持座、第三电机和第二齿轮;第二转轴沿前后方向通过轴承转动连接在所述处理机构壳体的内腔后侧中心位置,所述第二转轴的后端延伸出处理机构壳体的外壁;第四锥形齿轮螺钉连接在所述第二转轴的前端,所述第四锥形齿轮与第三锥形齿轮啮合;第一齿轮键连接在所述第二转轴的外壁前侧;转动盘螺钉连接在所述第二转轴的后端;连杆一端通过销轴转动连接在所述转动盘的前侧外端;固定座设置在所述笼体的内腔顶端,所述固定
座的后侧与连杆的另一端通过销轴转动连接;夹持座设置在所述固定座的底端;第三电机安装在所述处理机构壳体的内腔,所述第三电机与控制器电性连接;第二齿轮螺钉连接在所述第三电机的输出端,所述第二齿轮与第一齿轮啮合。
12.优选的,所述刺激组件包括:刺激组件外壳、固定筒、通气孔、限位插槽、电击棒、触发套筒和通孔;刺激组件外壳沿上下方向内嵌在所述底板的内侧;固定筒沿上下方向设置在所述刺激组件外壳的内腔中部;所述通气孔的数量为四个,四个所述通气孔沿周向间隔九十度开设在固定筒的外侧底端;限位插槽沿上下方向开设在所述固定筒的顶端中部,四个所述通气孔的内侧与限位插槽的内腔底部相通;电击棒沿上下方向插接在所述限位插槽的内腔,所述电击棒与控制器电性连接;触发套筒沿上下方向插接在刺激组件外壳的内腔,所述触发套筒的内腔与固定筒的外部适配套接;通孔开设在所述触发套筒的内腔顶端且位于限位插槽的上方对应位置处。
13.与现有技术相比,本发明的有益效果是:该生物科技实验样品处理装置:
14.1、通过第一电机驱动第一皮带轮转动,第二皮带轮在第一皮带轮旋转力的作用下驱动转动板转动,以使存储机构筒体内部实验鼠进入至传送管道内,负压风机将存储机构壳体内部空气抽出形成负压,使传送管道内部实验鼠进入至存储机构壳体内,推动模块驱动推板将传送管道底部封闭同时推动实验鼠进入至笼体内;
15.2.通过实验鼠触发套筒向下移动,进而在限位插槽内部空气压力作用下,将电击棒从限位插槽内腔向上顶升并穿过通孔内腔探出至外侧,电击棒表面产生电压刺激实验鼠离开当前位置后,进而避免实验鼠躲藏在外侧使其活动范围控制在中部位置,便于后续对其进行控制,第三电机驱动第二齿轮转动,并在第二齿轮、第二转轴、第四锥形齿轮、第三锥形齿轮、第一转轴、第二锥形齿轮和第一锥形齿轮传动下驱动丝杠螺母杆转动,以使丝杠螺母驱动连接架带动限位滑块向下移动以将笼体的左右两侧封闭,第二转轴驱动转动盘同步转动,以使固定座向下移动以对实验鼠进行夹持,移动机械臂驱动系簧枪移动至实验鼠身体外部,气泵将内部高压气体泵入至系簧枪内使系簧枪对老鼠进行击杀,电推杆推动第二连接座带动底板以与笼体销轴转动连接处为顶点向下转动,内部实验鼠尸体进入至焚烧炉内,以使焚烧炉对实验鼠尸体进行焚烧无害化处理;
16.从而可实现对生物实验逃逸后的活体实验鼠进行杀灭无害化的自动处理,避免安乐死等药物处理导致的成本较高,以及手动处理对操作员带来的心理影响,手动操作项较少,清理效率较高。
附图说明
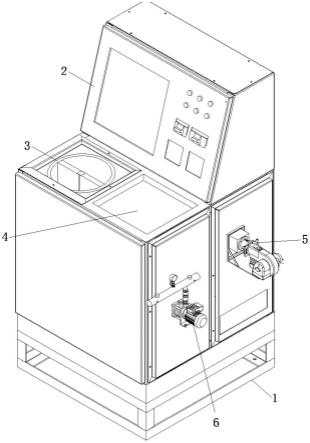
17.图1为本发明的结构示意图;
18.图2为图1的存储机构爆炸图;
19.图3为图1的处理机构爆炸图;
20.图4为图3的刺激组件爆炸图。
21.图中:1、壳体,2、控制器,3、存储机构,4、处理机构,5、焚烧炉,6、气泵,7、刺激组件;
22.31、存储机构筒体,32、转动板,33、第一电机,34、第一皮带轮,35、第二皮带轮,36、传送管道,37、存储机构壳体,38、负压风机,39、推动模块,310、推板;
23.41、处理机构壳体,42、笼体,43、底板,44、转动座,45、电推杆,46、第二连接座,47、移动机械臂,48、系簧枪,49、导轨,410、限位滑块,411、密封板,412、限位滑槽,413、连接架,414、丝杠螺母杆,415、丝杠螺杆,416、第一锥形齿轮,417、第一转轴,418、第二锥形齿轮,419、第三锥形齿轮,420、第二转轴,421、第四锥形齿轮,422、第一齿轮,423、转动盘,424、连杆,425、固定座,426、夹持座,427、第三电机,428、第二齿轮;
24.71、刺激组件外壳,72、固定筒,73、通气孔,74、限位插槽,75、电击棒,76、触发套筒,77、通孔。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.请参阅图1-4,本发明提供一种技术方案:一种生物科技实验样品处理装置,包括:壳体1、控制器2、存储机构3、处理机构4、焚烧炉5和气泵6;控制器2安装在壳体1的顶端后侧,存储机构3内嵌在壳体1的顶端左前方;处理机构4内腔在壳体1的内腔且位于存储机构3的右侧;焚烧炉5内嵌在壳体1的内腔且位于处理机构4的后侧,焚烧炉5和控制器2电性连接,焚烧炉5可由控制器2进行控制对实验鼠尸体进行焚烧无害化处理;气泵6安装在壳体1的外侧,气泵6和控制器2电性连接,气泵6可由控制器2进行控制将内部高压气体泵入至系簧枪48内。
27.作为优选方案,更进一步的,存储机构3包括:存储机构筒体31、转动板32、第一电机33、第一皮带轮34、第二皮带轮35、传送管道36、存储机构壳体37、负压风机38、推动模块39和推板310;
28.存储机构筒体31内嵌在壳体1的内腔;转动板32通过轴承转动连接在存储机构筒体31的内腔,转动板32的轴心延伸出存储机构筒体31的底端;第一电机33设置在存储机构筒体31的外侧,第一电机33和控制器2电性连接;
29.在本实施例中,第一电机33可由控制器2进行控制驱动第一皮带轮34顺时针方向转动;第一皮带轮34螺钉连接在第一电机33的输出端,第二皮带轮35螺钉连接在转动板32的轴心底端,第二皮带轮35和第一皮带轮34通过皮带传动连接;
30.在本实施例中,第二皮带轮35可在第一皮带轮34旋转力的作用下驱动转动板32在存储机构筒体31内腔转动;
31.传送管道36一端设置在存储机构筒体31的内腔侧壁开口处,存储机构壳体37设置在壳体1的内腔,传送管道36的另一端延伸进存储机构壳体37的内腔,负压风机38设置在存储机构壳体37的内腔底端右侧开口处,负压风机38和控制器2电性连接,推动模块39设置在存储机构壳体37的内腔左侧,推动模块39和控制器2电性连接,
32.在本实施例中,推动模块39可通过控制器2进行控制,推动模块39通过自身伸长缩短驱动推板310在存储机构壳体37的内腔左右运动;
33.推板310安装在推动模块39的伸缩端。
34.在本实施例中,推板310的形状为l形,使推板310移动同时将传送管道36底部封
闭,防止实验鼠从传送管道36内部逃脱,并推动实验鼠由存储机构壳体37进入至笼体42内。
35.作为优选方案,更进一步的,处理机构4包括:处理机构壳体41、笼体42、底板43、刺激组件7、转动座44、电推杆45、第二连接座46、移动机械臂47和系簧枪48;处理机构壳体41沿前后方向设置在壳体1的内腔;笼体42设置在处理机构壳体41的底端且位于焚烧炉5的进口处,存储机构壳体37的内腔与笼体42的内腔相贯通;
36.在本实施例中,为提高处理机构4内部装置移动准确性可根据实际需要在笼体42内部安装传感器或定位摄像头;
37.底板43通过轴承转动连接在笼体42的内腔底端开口处左侧;
38.在本实施例中,底板43可以与笼体42销轴转动连接处为顶点向下或向上转动实现对笼体42内腔底端密封,进而使笼体42内部实验鼠尸体进入至焚烧炉5内;
39.刺激组件7的数量为两组,每组刺激组件7的数量为四个,两组刺激组件7分别从前至后间隙内嵌在43的内侧左右两端;转动座44安装在处理机构壳体41的内腔右侧;电推杆45的数量为两个,两个电推杆45的一端通过转动连接在转动座44的内侧前后两端,电推杆45和控制器2电性连接;
40.在本实施例中,电推杆45可由控制器2进行控制伸长缩短,电推杆45自身伸长缩短过程中可以与转动座44的内侧销轴转动连接处为顶点顺时针或逆时针方向转动;
41.第二连接座46的数量为两个,两个第二连接座46分别设置在底板43的顶端右侧前后来两端,前后两个电推杆45的另一端分别与前后两个第二连接座46的内侧通过销轴转动连接;移动机械臂47设置在处理机构壳体41的内腔右侧底端,移动机械臂47和控制器2电性连接,移动机械臂47可由控制器2进行控制驱动系簧枪48移动至实验鼠身体外部;系簧枪48安装在移动机械臂47的移动端,系簧枪48的进气口与气泵6通过导管相连接;
42.在本实施例中,系簧枪48受到气泵6内部高压气体产生的力量,迅速击出内部小锤,之后小锤在自身内部弹簧拉力下收回,可瞬间击碎实验鼠的骨骼神经;
43.更具体的,其中,笼体42的左右两外侧设置有密封组件,密封组件包括:导轨49、限位滑块410、密封板411、限位滑槽412、连接架413、丝杠螺母杆414、丝杠螺杆415、第一锥形齿轮416、第一转轴417、第二锥形齿轮418和第三锥形齿轮419;
44.导轨49的数量为两组,每组导轨49的数量为两个,两个导轨49分别沿上下方向设置在笼体42的外侧前后两端;限位滑块410的数量为两组,每组限位滑块410的数量为两个,两组限位滑块410分别插接在左右两组导轨49的内腔,限位滑块410可在导轨49的内腔上下移动;密封板411的数量为两个,两个密封板411设置在左右两组前后两个限位滑块410的内侧;
45.在本实施例中,密封板411可将笼体42左右两侧密封防止实验鼠逃出;
46.限位滑槽412的数量为两个,两个限位滑槽412分别开设在处理机构壳体41的内腔左右两侧中心位置;连接架413的数量为两个,两个连接架413分别插接在左右两个限位滑槽412的内腔,两个连接架413的一端分别与左右两个密封板411的顶端固定连接;丝杠螺母杆414的数量为两个,两个丝杠螺母杆414分别通过轴承转动连接在处理机构壳体41的内腔底端左右两侧;丝杠螺杆415的数量为两个,两个丝杠螺杆415分别螺接在左右两个丝杠螺母杆414的内腔,左右两个连接架413的另一端与左右两个丝杠螺杆415的外侧通过轴承转动连接,丝杠螺杆415可在丝杠螺母杆414旋转力的作用下向上或向下移动;第一锥形齿轮
416的数量为两个,两个第一锥形齿轮416分别键连接在左右两个丝杠螺母杆414的外壁,第一锥形齿轮416可在第二锥形齿轮418旋转力的作用下驱动丝杠螺母杆414转动;第一转轴417沿左右方向通过轴承转动连接在处理机构壳体41的内腔;第二锥形齿轮418的数量为两个,两个第二锥形齿轮418分别键连接在第一转轴417的左右两端;第三锥形齿轮419键连接在第一转轴417的外壁中心位置;笼体42的内内腔中心位置设置有固定组件;
47.进一步的,固定组件包括:第二转轴420、第四锥形齿轮421、第一齿轮422、转动盘423、连杆424、固定座425、夹持座426、第三电机427和第二齿轮428;第二转轴420沿前后方向通过轴承转动连接在处理机构壳体41的内腔后侧中心位置,第二转轴420的后端延伸出处理机构壳体41的外壁;第四锥形齿轮421螺钉连接在第二转轴420的前端,第四锥形齿轮421与第三锥形齿轮419啮合;第一齿轮422键连接在第二转轴420的外壁前侧;转动盘423螺钉连接在第二转轴420的后端;连杆424一端通过销轴转动连接在转动盘423的前侧外端;固定座425设置在笼体42的内腔顶端,固定座425的后侧与连杆424的另一端通过销轴转动连接;夹持座426设置在固定座425的底端;第三电机427安装在处理机构壳体41的内腔,第三电机427与控制器2电性连接,第三电机427可由控制器2进行控制驱动第二齿轮428顺时针或逆时针方向转动;第二齿轮428螺钉连接在第三电机427的输出端,第二齿轮428与第一齿轮422啮合;
48.在本实施例中,第一齿轮422可在第二齿轮428的旋转力的作用下驱动第二转轴420逆时针或顺时针方向转动。
49.作为优选方案,更进一步的,刺激组件7包括:刺激组件外壳71、固定筒72、通气孔73、限位插槽74、电击棒75、触发套筒76和通孔77;刺激组件外壳71沿上下方向内嵌在底板43的内侧;固定筒72沿上下方向设置在刺激组件外壳71的内腔中部;通气孔73的数量为四个,四个通气孔73沿周向间隔九十度开设在固定筒72的外侧底端;限位插槽74沿上下方向开设在固定筒72的顶端中部,四个通气孔73的内侧与限位插槽74的内腔底部相通,电击棒75外壁与限位插槽74的内腔接触位置应作密封处理,防止内部压力空气流失;电击棒75沿上下方向插接在限位插槽74的内腔,电击棒75与控制器2电性连接,电击棒75可通过控制器2进行控制,电击棒75表面产生电压刺激实验鼠离开当前位置后;触发套筒76沿上下方向插接在刺激组件外壳71的内腔,触发套筒76的内腔与固定筒72的外部适配套接;
50.在本实施例中,触发套筒76外壁与刺激组件外壳71的内腔和固定筒72的外部接触位置应作密封处理,防止内部压力空气流失,触发套筒76可在实验鼠体重的重力作用下被推动在刺激组件外壳71的内腔向下运动,进而将刺激组件外壳71的内腔与固定筒72的外部空隙处空气挤入至通气孔73内;
51.通孔77开设在触发套筒76的内腔顶端且位于限位插槽74的上方对应位置处,电击棒75可穿过通孔77内腔探出至外侧。
52.下述主要介绍工作原理以及过程,具体工作如下。
53.步骤1:使用时,操作员将需要处理的实验鼠放置在存储机构筒体31内,控制控制器2依次启动第一电机33、负压风机38和第二电机315启动,第一电机33驱动第一皮带轮34顺时针方向转动,由于第二皮带轮35和第一皮带轮34通过皮带传动连接,促使第二皮带轮35在第一皮带轮34旋转力的作用下驱动转动板32在存储机构筒体31内腔转动,以使存储机构筒体31内部实验鼠在转动板32旋转力的作用下进入至传送管道36内,负压风机38内部扇
叶转动以将存储机构壳体37内部空气抽出形成负压,促使传送管道36内部实验鼠进入至存储机构壳体37内,推动模块39伸长驱动推板310在存储机构壳体37内腔向右侧移动,促使推板310将传送管道36底部封闭同时推动实验鼠由存储机构壳体37进入至笼体42内;
54.步骤2:实验鼠进入笼体42后自身体重触发套筒76,促使触发套筒76在压力作用下在刺激组件外壳71内腔向下移动,并使刺激组件外壳71内部空气由通气孔73推入至限位插槽74内腔底部,进而在限位插槽74内部空气压力作用下,将电击棒75从限位插槽74内腔向上顶升并穿过通孔77内腔探出至外侧,操作员控制控制器2启动电击棒75,电击棒75表面产生电压刺激实验鼠离开当前位置后,电击棒75在重力作用下回落至限位插槽74内腔底部,并在压力作用下使触发套筒76复位,进而避免实验鼠躲藏在外侧使其活动范围控制在中部位置,便于后续对其进行控制,操作员控制控制器2启动第三电机427,第三电机427驱动第二齿轮428顺时针方向转动,使第一齿轮422在第二齿轮428的旋转力的作用下驱动第二转轴420转动,以使第二转轴420驱动第四锥形齿轮421转动,促使第三锥形齿轮419在第四锥形齿轮421旋转力的作用下驱动第一转轴417转动,并使第一转轴417驱动自身左右两侧第二锥形齿轮418转动,由于第一锥形齿轮416和第二锥形齿轮418啮合,促使第一锥形齿轮416在第二锥形齿轮418旋转力的作用下驱动丝杠螺母杆414转动,由于丝杠螺杆415和丝杠螺母杆414螺接,促使丝杠螺杆415在丝杠螺母杆414旋转力的作用下向下移动,进而在限位滑槽412的限位作用下,使丝杠螺杆415驱动连接架413向下移动,并在密封板411的限位作用下,使连接架413带动限位滑块410向下移动以将笼体42的左右两侧封闭,第二转轴420驱动第四锥形齿轮421转动同时驱动转动盘423转动,以使第二转轴420驱动转动盘423带动连杆424一端向下转动,以使连杆424驱动固定座425在笼体42的内腔向下移动以对实验鼠进行夹持,操作员控制控制器2依次启动移动机械臂47、气泵6、电推杆45和焚烧炉5依次启动,移动机械臂47驱动系簧枪48移动至实验鼠身体外部,气泵6将内部高压气体泵入至系簧枪48内,以使系簧枪48对老鼠进行击杀,电推杆45通过自身伸长以推动第二连接座46带动底板43以与笼体42销轴转动连接处为顶点向下转动,内部实验鼠尸体进入至焚烧炉5内,以使焚烧炉5对实验鼠尸体进行焚烧无害化处理;
55.从而可实现对生物实验逃逸后的活体实验鼠进行杀灭无害化的自动处理,避免安乐死等药物处理导致的成本较高,以及手动处理对操作员带来的心理影响,手动操作项较少,清理效率较高。
56.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1