一种无级调节智能控制砻谷机及操作方法与流程
1.本发明涉及砻谷机技术领域,具体为一种无级调节智能控制砻谷机及操作方法。
背景技术:
2.砻谷机是将稻谷脱去颖壳,制成糙米的粮食加工机械。它能脱去稻谷外壳,减少米粒爆腰和表皮受损,尽量保持糙米完整,且通过无极调节电机的调节的设计能够调整砻谷机的工作效率,便于对砻谷机进行使用。
3.如申请号为cn202021680453.0.的实用新型属于砻谷机技术领域,尤其为一种稻壳去除彻底的砻谷机,包括底板,所述底板的顶部固定连接有支撑柱,所述支撑柱的顶部固定连接有砻谷机箱体,所述砻谷机箱体的两侧内壁均固定连接有第一斜板、第二斜板和第三斜板,所述砻谷机箱体的内壁之间转动连接有第一橡胶辊和第二橡胶辊,所述砻谷机箱体的背面固定连接有方板,所述方板的顶部固定连接有第一电机,所述第一电机的输出端延伸至砻谷机箱体内并与第二橡胶辊固定连接,所述第一电机的输出端表面固定连接有主动齿轮。该实用新型通过进料口、第三电机、第二转动轴、进料管和螺旋桨叶可将稻谷送进送料口,即到达了省力的效果,又能很好的解决因进料口过高,影响送料降低工作效率的问题。
4.类似于上述申请目前还存在不足之处:不便在砻谷机使用时进行静噪处理,同时上料时稻谷暴露外部需多次进行上料处理,不便进行封闭上料,且不便对稻壳进行收集转送。
5.于是,有鉴于此,针对现有的结构及缺失予以研究改良,提出一种无级调节智能控制砻谷机及操作方法,以期达到更具有更加实用价值性的目的。
技术实现要素:
6.针对现有技术的不足,本发明提供了一种无级调节智能控制砻谷机及操作方法,解决了上述背景技术中提出的问题。
7.为实现以上目的,本发明通过以下技术方案予以实现:一种无级调节智能控制砻谷机及操作方法,包括防护框和液压气缸,所述防护框的内部设置有支撑架,且支撑架外侧左端设置有无极调节电机,所述无极调节电机的输出端通过驱动轴连接有连接盘,且连接盘的外表面设置有皮带,所述皮带的另一端安装有砻谷机主体,且砻谷机主体的前后两端均设置有缓冲腔,所述缓冲腔内部一端安装有放置框,且放置框的内部设置有伺服电机,所述放置框外表面一端安装有第二液压气杆,所述伺服电机的输出端连接有连接轴,且连接轴的外部设置有衔接杆,所述衔接杆的端部安装有底置板,所述底置板的外表面设置有内置辅助腔,且内置辅助腔的内部设置有用于对砻谷机工作时产生的壳进行收集的挤压组件,所述挤压组件包括第一液压气杆、固定板和推板,且第一液压气杆的输出端安装有推板,所述内置辅助腔的顶部外表面设置有固定板,所述液压气缸设置于支撑架底部两侧,且液压气缸的底部设置有底板,所述底板的内部安装有电动滑轨,且电动滑轨通过滑块滑动
连接有收集盘,所述防护框的顶部设置有放置腔,且放置腔的顶部滑动安装有封板,所述防护框的右侧卡合设置有第一侧板,所述砻谷机主体的内部设置有中心进料口,且中心进料口的下端固定安装有上金刚砂盘,所述上金刚砂盘的下端设置有下金刚砂盘,且下金刚砂盘的下端中部安装有传送轴,所述传送轴的外部设置有接料集中槽,所述砻谷机主体的外部螺纹设置有螺纹丝杆,且螺纹丝杆的一端转动安装有调整板,所述接料集中槽的一侧设置有风扇。
8.进一步的,所述内置辅助腔的内部为中空状结构,且内置辅助腔与固定板为一体化结构。
9.进一步的,所述砻谷机主体的顶部设置有下料框,且下料框的内部设置有用于对下料幅度进行控制的调整组件。
10.进一步的,所述调整组件包括顶块、调整板、铰接块、第二电动推杆和活动板,且顶块的内部转动安装有调整板,所述调整板内部滑动设置有活动板,所述调整板外表面一端通过铰接块安装有第二电动推杆。
11.进一步的,所述防护框外部设置有衔接架,且衔接架的内部设置有出料口,所述出料口的内部卡合安装有盖板。
12.进一步的,所述出料口的外部设置有用于对袋进行限位的限位组件,且限位组件包括连接框、第一电动推杆、集合板和定位板,所述连接框的内部设置有第一电动推杆,且第一电动推杆的输出端安装有集合板,所述集合板外表面设置有定位板。
13.进一步的,所述定位板呈“l”型结构,且定位板与集合板为一体化结构。
14.进一步的,所述出料口的外表面设置有辅助高度调整的调节组件,且调节组件包括第一挡板、第二挡板和第三挡板,所述第一挡板的内部滑动安装有第二挡板,且第二挡板的内部滑动安装有第三挡板,所述防护框的左侧卡合设置有第二侧板,且第二侧板的外表面安装有转接块,所述转接块的内部转动设置有门板。
15.进一步的,所述放置腔的内部为中空状结构,且放置腔底部与防护框卡合连接。
16.进一步的,所述无级调节智能控制砻谷机的操作方法包括以下步骤,步骤一,首先能够根据使用所需选择性使得放置腔卡合限位在防护框的上端,卡合限位之后使用者在放置腔中预先放置稻谷,放置结束之后,手动沿着放置腔顶部水平方向滑动封板,直至封板完全与放置腔重合;步骤二,接着放置之后的稻谷会通过重力作用转送至砻谷机主体顶部的下料框中,能够根据砻谷机主体加工所需,通过第二电动推杆和铰接块的设计同时配合顶块和调整板的转动实现对调整板角度调整,且调整板设置有两组,通过对两个调整板角度调整,便于对下料情况进行控制,避免下料过多导致砻谷机主体加工受阻;步骤三,下料调整之后的稻谷会通过中心进料口进入至上金刚砂盘和下金刚砂盘之间,然后通过无极调节电机、连接盘和皮带的设计会带动传送轴进行转动,通过传送轴的转动会同步带动下金刚砂盘转动,下金刚砂盘转动产生的离心力迫使稻谷进入两盘之间的环形脱壳区,在端压和摩擦作用下实现脱壳处理,脱壳的稻谷会进入至接料集中槽中,利用风扇的设计对接料集中槽中的稻米与壳分离进行分离,另外使用者能够通过手动转动螺栓无极调节电机与支撑架之间进行拆卸,同时关于支撑架选择无极调节电机再次固定高度,利用螺栓的设计对无极调节电机与支撑架固定,同时同步调整传送轴外部与调整传送轴活
动连接的限位轴套,使得调整传送轴关于砻谷机主体向上或者向下移动,位置调整结束之后利用螺栓固定,通过上金刚砂盘和下金刚砂盘之间的距离调整,便于根据稻谷粒度的大小进行脱壳处理,使用者通过顺时针或者逆时针转动螺纹丝杆,螺纹丝杆与砻谷机主体螺纹连接,螺纹丝杆与接料集中槽通过橡胶弹性连接,通过螺纹丝杆的转动会带动移动板进行位置的移动,便于根据脱壳时产生的离心端压与移动板进行距离上的调整,出料口设置有两组,从而处理结束之后的稻谷从其中一组稻谷下料,稻谷脱的壳从另外一组出料口下料,下料时稻谷或者稻谷壳会首先转送至缓冲腔内部,避免稻谷或者稻谷壳下料时速度过快使用者不便进行收集,同时能够利用第二液压气杆带动内置辅助腔位置移动,通过对内置辅助腔的位置移动能够对缓冲腔内部的稻谷或者稻谷壳推送至出料口处下料,另外下料时使用者能够把传送管或者对稻谷或者稻谷壳打包的袋子放置在定位板与出料口之间,然后通过连接框中第一电动推杆的设计带动集合板位置移动,从而定位板端部会与连接框外部紧密贴合在一起,以此实现对传送管或者对稻谷或者稻谷壳打包的袋子的限位,便于对稻谷或者稻谷壳收集;步骤四,然后对于潮湿的稻谷壳或者在内置辅助腔预存放有水,通过能够利用第二液压气杆带动内置辅助腔位置移动使得内置辅助腔处于缓冲腔中接料区域,稻谷壳会掉落至内置辅助腔中,然后能够利用第一液压气杆的设计带动推板位置移动实现对掉落在内置辅助腔中稻谷壳的挤压成型,挤压成型结束之后通过伺服电机和连接轴的设计带动衔接杆进行转动,且衔接杆与底置板相连接,从而底置板会关于内置辅助腔转动至一侧,挤压成型的稻谷壳会转送至收集盘中,利用电动滑轨和滑块的作用进行再次输送,输送至靠近防护框时使用者手动拉动与转接块转动连接的门板,便于使用者把收集盘中的稻谷壳取出。
17.本发明提供了一种无级调节智能控制砻谷机及操作方法,具备以下有益效果:该砻谷机封闭式结构从而能够在砻谷机使用时有效降噪,且下料时能够利用放置腔和封板的设计进行封闭下料,避免使用者手动多次下料,同时也避免稻谷暴露外部在进行加工时噪音较大的问题,同时配合下料框中调整组件的设计能够自动对下料的幅度进行调整,避免下料过多导致砻谷机工作受阻的问题,并且对加工之后的稻谷进而稻谷壳便于进行分类收集,同时还能够对稻谷壳进行挤压式收集,避免稻谷壳较轻收集式散落以及占用空间不便进行运输的问题,另外在对稻谷或者稻谷可进行收集时能够利用限位组件的设计对袋以及传送管进行限位,便于对加工结束之后的稻谷和稻谷壳进行收集。
18.1.该一种无级调节智能控制砻谷机及操作方法,能够根据使用所需选择性使得放置腔卡合限位在防护框的上端,卡合限位之后使用者在放置腔中预先放置稻谷,放置结束之后,手动沿着放置腔顶部水平方向滑动封板,直至封板完全与放置腔重合,实现对放置腔的封闭处理,且放置腔内部呈倾斜状,便于物品的自动下料,无需使用者多次手动下料,同时结构简单,无需占用较多空间,便于进行拆卸组装使用,封闭下料的设计还能够有效降噪;2.该一种无级调节智能控制砻谷机及操作方法,稻谷会通过重力作用转送至砻谷机主体顶部的下料框中,能够根据砻谷机主体加工所需,通过第二电动推杆和铰接块的设计同时配合顶块和调整板的转动实现对调整板角度调整,且调整板设置有两组,通过对两个调整板角度调整,便于对下料情况进行控制,避免下料过多导致砻谷机主体加工受阻;3.该一种无级调节智能控制砻谷机及操作方法,通过无极调节电机、连接盘和皮
带的设计使得砻谷机主体工作实现稻谷脱壳处理,出料口设置有两组,从而处理结束之后的稻谷从其中一组稻谷下料,稻谷脱的壳从另外一组出料口下料,下料时稻谷或者稻谷壳会首先转送至缓冲腔内部,避免稻谷或者稻谷壳下料时速度过快使用者不便进行收集;4.该一种无级调节智能控制砻谷机及操作方法,能够利用第二液压气杆带动内置辅助腔位置移动,通过对内置辅助腔的位置移动能够对缓冲腔内部的稻谷或者稻谷壳推送至出料口处下料,另外下料时使用者能够把传送管或者对稻谷或者稻谷壳打包的袋子放置在定位板与出料口之间,然后通过连接框中第一电动推杆的设计带动集合板位置移动,从而定位板端部会与连接框外部紧密贴合在一起,以此实现对传送管或者对稻谷或者稻谷壳打包的袋子的限位,便于对稻谷或者稻谷壳收集;5.该一种无级调节智能控制砻谷机及操作方法,对于潮湿的稻谷壳或者在内置辅助腔预存放有水,通过能够利用第二液压气杆带动内置辅助腔位置移动使得内置辅助腔处于缓冲腔中接料区域,稻谷壳会掉落至内置辅助腔中,然后能够利用第一液压气杆的设计带动推板位置移动实现对掉落在内置辅助腔中稻谷壳的挤压成型,挤压成型结束之后通过伺服电机和连接轴的设计带动衔接杆进行转动,且衔接杆与底置板相连接,从而底置板会关于内置辅助腔转动至一侧,挤压成型的稻谷壳会转送至收集盘中,利用电动滑轨和滑块的作用进行再次输送,输送至靠近防护框时使用者手动拉动与转接块转动连接的门板,便于使用者把收集盘中的稻谷壳取出。
附图说明
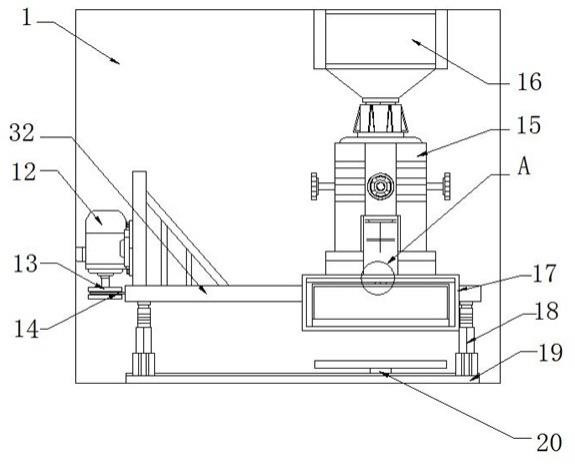
19.图1为本发明的一种无级调节智能控制砻谷机主视外部结构示意图;图2为本发明的一种无级调节智能控制砻谷机防护框内部结构示意图;图3为本发明的一种无级调节智能控制砻谷机图2中a处放大结构示意图;图4为本发明的一种无级调节智能控制砻谷机内置辅助腔俯视连接结构示意图;图5为本发明的一种无级调节智能控制砻谷机伺服电机仰视连接结构示意图;图6为本发明的一种无级调节智能控制砻谷机出料口侧视结构示意图;图7为本发明的一种无级调节智能控制砻谷机下料框内部结构示意图;图8为本发明的一种无级调节智能控制砻谷机底板俯视结构示意图;图9为本发明的一种无级调节智能控制砻谷机砻谷机主体内部结构示意图。
20.图中:1、防护框;2、第一侧板;3、衔接架;4、调节组件;401、第一挡板;402、第二挡板;403、第三挡板;5、出料口;6、盖板;7、第二侧板;8、转接块;9、门板;10、放置腔;11、封板;12、无极调节电机;13、连接盘;14、皮带;15、砻谷机主体;16、下料框;17、缓冲腔;18、液压气缸;19、底板;20、滑块;21、放置框;22、内置辅助腔;23、伺服电机;24、挤压组件;2401、第一液压气杆;2402、固定板;2403、推板;25、连接轴;26、衔接杆;27、底置板;28、限位组件;2801、连接框;2802、第一电动推杆;2803、集合板;2804、定位板;29、调整组件;2901、顶块;2902、调整板;2903、铰接块;2904、第二电动推杆;2905、活动板;30、收集盘;31、电动滑轨;32、支撑架;33、第二液压气杆;34、螺纹丝杆;35、移动板;36、风扇;37、中心进料口;38、上金刚砂盘;39、下金刚砂盘;40、传送轴;41、接料集中槽;42、限位轴套。
具体实施方式
21.请参阅图1至图9,本发明提供技术方案:一种无级调节智能控制砻谷机及操作方法,包括防护框1、第一侧板2、衔接架3、调节组件4、第一挡板401、第二挡板402、第三挡板403、出料口5、盖板6、第二侧板7、转接块8、门板9、放置腔10、封板11、无极调节电机12、连接盘13、皮带14、砻谷机主体15、下料框16、缓冲腔17、液压气缸18、底板19、滑块20、放置框21、内置辅助腔22、伺服电机23、挤压组件24、第一液压气杆2401、固定板2402、推板2403、连接轴25、衔接杆26、底置板27、限位组件28、连接框2801、第一电动推杆2802、集合板2803、定位板2804、调整组件29、顶块2901、调整板2902、铰接块2903、第二电动推杆2904、活动板2905、收集盘30、电动滑轨31、支撑架32、第二液压气杆33、螺纹丝杆34、移动板35、风扇36、中心进料口37、上金刚砂盘38、下金刚砂盘39、传送轴40、接料集中槽41和限位轴套42,防护框1的内部设置有支撑架32,且支撑架32外侧左端设置有无极调节电机12,无极调节电机12的输出端通过驱动轴连接有连接盘13,且连接盘13的外表面设置有皮带14,皮带14的另一端安装有砻谷机主体15,且砻谷机主体15的前后两端均设置有缓冲腔17,缓冲腔17内部一端安装有放置框21,且放置框21的内部设置有伺服电机23,放置框21外表面一端安装有第二液压气杆33,伺服电机23的输出端连接有连接轴25,且连接轴25的外部设置有衔接杆26,衔接杆26的端部安装有底置板27,底置板27的外表面设置有内置辅助腔22,且内置辅助腔22的内部设置有用于对砻谷机工作时产生的壳进行收集的挤压组件24,内置辅助腔22的内部为中空状结构,且内置辅助腔22与固定板2402为一体化结构,挤压组件24包括第一液压气杆2401、固定板2402和推板2403,且第一液压气杆2401的输出端安装有推板2403,内置辅助腔22的顶部外表面设置有固定板2402,液压气缸18设置于支撑架32底部两侧,且液压气缸18的底部设置有底板19,底板19的内部安装有电动滑轨31,且电动滑轨31通过滑块20滑动连接有收集盘30,防护框1的顶部设置有放置腔10,且放置腔10的顶部滑动安装有封板11,防护框1的右侧卡合设置有第一侧板2,砻谷机主体15的内部设置有中心进料口37,且中心进料口37的下端固定安装有上金刚砂盘38,上金刚砂盘38的下端设置有下金刚砂盘39,且下金刚砂盘39的下端中部安装有传送轴40,传送轴40的外部设置有接料集中槽41,砻谷机主体15的外部螺纹设置有螺纹丝杆34,且螺纹丝杆34的一端转动安装有移动板35,接料集中槽41的一侧设置有风扇36;具体操作如下,下料调整之后的稻谷会通过中心进料口37进入至上金刚砂盘38和下金刚砂盘39之间,然后通过无极调节电机12、连接盘13和皮带14的设计会带动传送轴40进行转动,通过传送轴40的转动会同步带动下金刚砂盘39转动,下金刚砂盘39转动产生的离心力迫使稻谷进入两盘之间的环形脱壳区,在端压和摩擦作用下实现脱壳处理,脱壳的稻谷会进入至接料集中槽41中,利用风扇36的设计对接料集中槽41中的稻米与壳分离进行分离,另外使用者能够通过手动转动螺栓无极调节电机12与支撑架32之间进行拆卸,同时关于支撑架32选择无极调节电机12再次固定高度,利用螺栓的设计对无极调节电机12与支撑架32固定,同时同步调整传送轴40外部与调整传送轴40活动连接的限位轴套42,使得调整传送轴40关于砻谷机主体15向上或者向下移动,位置调整结束之后利用螺栓固定,通过上金刚砂盘38和下金刚砂盘39之间的距离调整,便于根据稻谷粒度的大小进行脱壳处理,使用者通过顺时针或者逆时针转动螺纹丝杆34,螺纹丝杆34与接料集中槽41通过橡胶弹性连接,通过螺纹丝杆34的转动会带动移动板35进行位置的移动,便于根据脱壳时产生的离
心端压与移动板35进行距离上的调整,对于潮湿的稻谷壳或者在内置辅助腔22预存放有水,通过能够利用第二液压气杆33带动内置辅助腔22位置移动使得内置辅助腔22处于缓冲腔17中接料区域,稻谷壳会掉落至内置辅助腔22中,然后能够利用第一液压气杆2401的设计带动推板2403位置移动实现对掉落在内置辅助腔22中稻谷壳的挤压成型,挤压成型结束之后通过伺服电机23和连接轴25的设计带动衔接杆26进行转动,且衔接杆26与底置板27相连接,从而底置板27会关于内置辅助腔22转动至一侧,挤压成型的稻谷壳会转送至收集盘30中,利用电动滑轨31和滑块20的作用进行再次输送,输送至靠近防护框1时使用者手动拉动与转接块8转动连接的门板9,便于使用者把收集盘30中的稻谷壳取出。
22.如图2和图7所示,砻谷机主体15的顶部设置有下料框16,且下料框16的内部设置有用于对下料幅度进行控制的调整组件29,调整组件29包括顶块2901、调整板2902、铰接块2903、第二电动推杆2904和活动板2905,且顶块2901的内部转动安装有调整板2902,调整板2902内部滑动设置有活动板2905,调整板2902外表面一端通过铰接块2903安装有第二电动推杆2904;稻谷会通过重力作用转送至砻谷机主体15顶部的下料框16中,能够根据砻谷机主体15加工所需,通过第二电动推杆2904和铰接块2903的设计同时配合顶块2901和调整板2902的转动实现对调整板2902角度调整,且调整板2902设置有两组,通过对两个调整板2902角度调整,便于对下料情况进行控制,避免下料过多导致砻谷机主体15加工受阻。
23.如图1所示,防护框1外部设置有衔接架3,且衔接架3的内部设置有出料口5,出料口5的内部卡合安装有盖板6;当内置辅助腔22接纳空间足够时,盖板6与出料口5处于卡合状态,一定之间之后向外部拉动盖板6使得盖板6与出料口5分离开来,便于内置辅助腔22中稻谷或者稻谷壳统一取出,同时还能够利用利用收集盘30的设计对稻谷壳进行接纳减少对盖板6打开的频率。
24.如图1和图6所示,出料口5的外部设置有用于对袋进行限位的限位组件28,且限位组件28包括连接框2801、第一电动推杆2802、集合板2803和定位板2804,连接框2801的内部设置有第一电动推杆2802,且第一电动推杆2802的输出端安装有集合板2803,集合板2803外表面设置有定位板2804,定位板2804呈“l”型结构,且定位板2804与集合板2803为一体化结构;能够利用第二液压气杆33带动内置辅助腔22位置移动,通过对内置辅助腔22的位置移动能够对缓冲腔17内部的稻谷或者稻谷壳推送至出料口5处下料,另外下料时使用者能够把传送管或者对稻谷或者稻谷壳打包的袋子放置在定位板2804与出料口5之间,然后通过连接框2801中第一电动推杆2802的设计带动集合板2803位置移动,从而定位板2804端部会与连接框2801外部紧密贴合在一起,以此实现对传送管或者对稻谷或者稻谷壳打包的袋子的限位,便于对稻谷或者稻谷壳收集。
25.如图1所示,出料口5的外表面设置有辅助高度调整的调节组件4,且调节组件4包括第一挡板401、第二挡板402和第三挡板403,第一挡板401的内部滑动安装有第二挡板402,且第二挡板402的内部滑动安装有第三挡板403,防护框1的左侧卡合设置有第二侧板7,且第二侧板7的外表面安装有转接块8,转接块8的内部转动设置有门板9,放置腔10的内部为中空状结构,且放置腔10底部与防护框1卡合连接;能够根据使用所需选择性使得放置腔10卡合限位在防护框1的上端,卡合限位之
后使用者在放置腔10中预先放置稻谷,放置结束之后,手动沿着放置腔10顶部水平方向滑动封板11,直至封板11完全与放置腔10重合,实现对放置腔10的封闭处理,且放置腔10内部呈倾斜状,便于物品的自动下料,无需使用者多次手动下料,同时结构简单,无需占用较多空间,便于进行拆卸组装使用,封闭下料的设计还能够有效降噪,且能够在不需对放置腔10进行使用时,可向上拉动进行拆卸,同时利用液压气缸18的设计能够带动支撑架32上下位置移动,同通过对支撑架32的上下位置移动可使得下料框16凸出于防护框1顶部,便于使用者手动进行下料,同时也便于使用者对下料框16内部进行维护,另外在支撑架32上下移动时,出料口5会同步进行上下位置的移动,出料口5移动时会带动出料口5外部的第一挡板401、第二挡板402和第三挡板403之间相互滑动,辅助出料口5上下移动,便于根据下料所需高度进行使用。
26.无级调节智能控制砻谷机的操作方法包括以下步骤,步骤一,首先能够根据使用所需选择性使得放置腔10卡合限位在防护框1的上端,卡合限位之后使用者在放置腔10中预先放置稻谷,放置结束之后,手动沿着放置腔10顶部水平方向滑动封板11,直至封板11完全与放置腔10重合;步骤二,接着放置之后的稻谷会通过重力作用转送至砻谷机主体15顶部的下料框16中,能够根据砻谷机主体15加工所需,通过第二电动推杆2904和铰接块2903的设计同时配合顶块2901和调整板2902的转动实现对调整板2902角度调整,且调整板2902设置有两组,通过对两个调整板2902角度调整,便于对下料情况进行控制,避免下料过多导致砻谷机主体15加工受阻;步骤三,下料调整之后的稻谷会通过中心进料口37进入至上金刚砂盘38和下金刚砂盘39之间,然后通过无极调节电机12、连接盘13和皮带14的设计会带动传送轴40进行转动,通过传送轴40的转动会同步带动下金刚砂盘39转动,下金刚砂盘39转动产生的离心力迫使稻谷进入两盘之间的环形脱壳区,在端压和摩擦作用下实现脱壳处理,脱壳的稻谷会进入至接料集中槽41中,利用风扇36的设计对接料集中槽41中的稻米与壳分离进行分离,另外使用者能够通过手动转动螺栓无极调节电机12与支撑架32之间进行拆卸,同时关于支撑架32选择无极调节电机12再次固定高度,利用螺栓的设计对无极调节电机12与支撑架32固定,同时同步调整传送轴40外部与调整传送轴40活动连接的限位轴套42,使得调整传送轴40关于砻谷机主体15向上或者向下移动,位置调整结束之后利用螺栓固定,通过上金刚砂盘38和下金刚砂盘39之间的距离调整,便于根据稻谷粒度的大小进行脱壳处理,使用者通过顺时针或者逆时针转动螺纹丝杆34,螺纹丝杆34与砻谷机主体15螺纹连接,螺纹丝杆34与接料集中槽41通过橡胶弹性连接,通过螺纹丝杆34的转动会带动移动板35进行位置的移动,便于根据脱壳时产生的离心端压与移动板35进行距离上的调整,出料口5设置有两组,从而处理结束之后的稻谷从其中一组稻谷下料,稻谷脱的壳从另外一组出料口5下料,下料时稻谷或者稻谷壳会首先转送至缓冲腔17内部,避免稻谷或者稻谷壳下料时速度过快使用者不便进行收集,同时能够利用第二液压气杆33带动内置辅助腔22位置移动,通过对内置辅助腔22的位置移动能够对缓冲腔17内部的稻谷或者稻谷壳推送至出料口5处下料,另外下料时使用者能够把传送管或者对稻谷或者稻谷壳打包的袋子放置在定位板2804与出料口5之间,然后通过连接框2801中第一电动推杆2802的设计带动集合板2803位置移动,从而定位板2804端部会与连接框2801外部紧密贴合在一起,以此实现对传送管或者对稻谷
或者稻谷壳打包的袋子的限位,便于对稻谷或者稻谷壳收集,出料口5设置有两组,从而处理结束之后的稻谷从其中一组稻谷下料,稻谷脱的壳从另外一组出料口5下料,下料时稻谷或者稻谷壳会首先转送至缓冲腔17内部,避免稻谷或者稻谷壳下料时速度过快使用者不便进行收集,同时能够利用第二液压气杆33带动内置辅助腔22位置移动,通过对内置辅助腔22的位置移动能够对缓冲腔17内部的稻谷或者稻谷壳推送至出料口5处下料,另外下料时使用者能够把传送管或者对稻谷或者稻谷壳打包的袋子放置在定位板2804与出料口5之间,然后通过连接框2801中第一电动推杆2802的设计带动集合板2803位置移动,从而定位板2804端部会与连接框2801外部紧密贴合在一起,以此实现对传送管或者对稻谷或者稻谷壳打包的袋子的限位,便于对稻谷或者稻谷壳收集;步骤四,然后对于潮湿的稻谷壳或者在内置辅助腔22预存放有水,通过能够利用第二液压气杆33带动内置辅助腔22位置移动使得内置辅助腔22处于缓冲腔17中接料区域,稻谷壳会掉落至内置辅助腔22中,然后能够利用第一液压气杆2401的设计带动推板2403位置移动实现对掉落在内置辅助腔22中稻谷壳的挤压成型,挤压成型结束之后通过伺服电机23和连接轴25的设计带动衔接杆26进行转动,且衔接杆26与底置板27相连接,从而底置板27会关于内置辅助腔22转动至一侧,挤压成型的稻谷壳会转送至收集盘30中,利用电动滑轨31和滑块20的作用进行再次输送,输送至靠近防护框1时使用者手动拉动与转接块8转动连接的门板9,便于使用者把收集盘30中的稻谷壳取出。
27.综上,该一种无级调节智能控制砻谷机及操作方法,使用时首先能够根据使用所需选择性使得放置腔10卡合限位在防护框1的上端,卡合限位之后使用者在放置腔10中预先放置稻谷,放置结束之后,手动沿着放置腔10顶部水平方向滑动封板11,直至封板11完全与放置腔10重合;接着放置之后的稻谷会通过重力作用转送至砻谷机主体15顶部的下料框16中,能够根据砻谷机主体15加工所需,通过第二电动推杆2904和铰接块2903的设计同时配合顶块2901和调整板2902的转动实现对调整板2902角度调整,且调整板2902设置有两组,通过对两个调整板2902角度调整,便于对下料情况进行控制,避免下料过多导致砻谷机主体15加工受阻;下料调整之后的稻谷会通过中心进料口37进入至上金刚砂盘38和下金刚砂盘39之间,然后通过无极调节电机12、连接盘13和皮带14的设计会带动传送轴40进行转动,通过传送轴40的转动会同步带动下金刚砂盘39转动,下金刚砂盘39转动产生的离心力迫使稻谷进入两盘之间的环形脱壳区,在端压和摩擦作用下实现脱壳处理,脱壳的稻谷会进入至接料集中槽41中,利用风扇36的设计对接料集中槽41中的稻米与壳分离进行分离,另外使用者能够通过手动转动螺栓无极调节电机12与支撑架32之间进行拆卸,同时关于支撑架32选择无极调节电机12再次固定高度,利用螺栓的设计对无极调节电机12与支撑架32固定,同时同步调整传送轴40外部与调整传送轴40活动连接的限位轴套42,使得调整传送轴40关于砻谷机主体15向上或者向下移动,位置调整结束之后利用螺栓固定,通过上金刚砂盘38和下金刚砂盘39之间的距离调整,便于根据稻谷粒度的大小进行脱壳处理,使用者通过顺时针或者逆时针转动螺纹丝杆34,螺纹丝杆34与接料集中槽41通过橡胶弹性连接,通过螺纹丝杆34的转动会带动移动板35进行位置的移动,便于根据脱壳时产生的离心端压与移动板35进行距离上的调整,出料口5设置有两组,从而处理结束之后的稻谷从其中一组稻谷下料,稻谷脱的壳从另外一组出料口5下料,下料时稻谷或者稻谷壳会首先转送至缓冲腔17内部,避免稻谷或者稻谷壳下料时速度过快使用者不便进行收集,同时能够利用第二
液压气杆33带动内置辅助腔22位置移动,通过对内置辅助腔22的位置移动能够对缓冲腔17内部的稻谷或者稻谷壳推送至出料口5处下料,另外下料时使用者能够把传送管或者对稻谷或者稻谷壳打包的袋子放置在定位板2804与出料口5之间,然后通过连接框2801中第一电动推杆2802的设计带动集合板2803位置移动,从而定位板2804端部会与连接框2801外部紧密贴合在一起,以此实现对传送管或者对稻谷或者稻谷壳打包的袋子的限位,便于对稻谷或者稻谷壳收集;然后对于潮湿的稻谷壳或者在内置辅助腔22预存放有水,通过能够利用第二液压气杆33带动内置辅助腔22位置移动使得内置辅助腔22处于缓冲腔17中接料区域,稻谷壳会掉落至内置辅助腔22中,然后能够利用第一液压气杆2401的设计带动推板2403位置移动实现对掉落在内置辅助腔22中稻谷壳的挤压成型,挤压成型结束之后通过伺服电机23和连接轴25的设计带动衔接杆26进行转动,且衔接杆26与底置板27相连接,从而底置板27会关于内置辅助腔22转动至一侧,挤压成型的稻谷壳会转送至收集盘30中,利用电动滑轨31和滑块20的作用进行再次输送,输送至靠近防护框1时使用者手动拉动与转接块8转动连接的门板9,便于使用者把收集盘30中的稻谷壳取出,另外液压气缸18的设计能够带动支撑架32上下位置移动,同通过对支撑架32的上下位置移动可使得下料框16凸出于防护框1顶部,便于使用者手动进行下料,同时也便于使用者对下料框16内部进行维护,另外在支撑架32上下移动时,出料口5会同步进行上下位置的移动,出料口5移动时会带动出料口5外部的第一挡板401、第二挡板402和第三挡板403之间相互滑动,辅助出料口5上下移动,便于根据下料所需高度进行使用。
28.本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1