一种基于人工智能制造技术的矿山喷淋设备及其控制方法与流程
本发明涉及矿山作业,具体为一种基于人工智能制造技术的矿山喷淋设备及其控制方法。
背景技术:
1、智能制造是一种由智能机器和人类专家共同组成的人机一体化智能系统,它在制造过程中能进行智能活动,诸如分析、推理、判断、构思和决策等。通过人与智能机器的合作共事,去扩大、延伸和部分地取代人类专家在制造过程中的脑力劳动。它把制造自动化的概念更新,扩展到柔性化、智能化和高度集成化。
2、在矿业作业过程中,主要是矿山的矿产资源的采集,且在此过程中,为应对矿产资源采集过程中产生的灰尘,需要定时或不间断向矿山表面进行喷淋工作,以降低矿山作业造成的扬尘污染,同时喷淋的水体可对矿山进行一定的降温工作,并提高矿山的湿度,以保障矿山作业的安全性。
3、但,在矿山作业的巷道喷淋过程中,传统的喷淋方式为人工导入水体并对巷道进行持续喷淋,这种喷淋方式在矿山巷道的实际作业中可能具有一定的弊端:
4、1、对矿山巷道进行持续性喷淋时,容易造成矿山巷道的湿度过高或者巷道内部积水的情况;
5、2、若安排作业人员监测喷淋位置,则增加了矿山作业的人员消耗;
6、3、在喷淋时,难以针对实际的矿山开采位置控制不同位置的喷淋程度;
7、4、在矿山开采过程中,会有作业人员经过喷淋位置,此时的喷淋工作容易对作业人员的行进造成影响;
8、5、矿山开采过程中,由于卡车驾驶舱较高,无法有效查看盲区内是否有行人存在,容易发生事故;
9、6、在喷淋时,一般根据经验选择喷淋路线,无法做到喷淋路线最优设计。
10、因此我们对此做出改进,提出一种基于人工智能制造技术的矿山喷淋设备及其控制方法。
技术实现思路
1、为了解决上述技术问题,本发明提供了如下的技术方案:
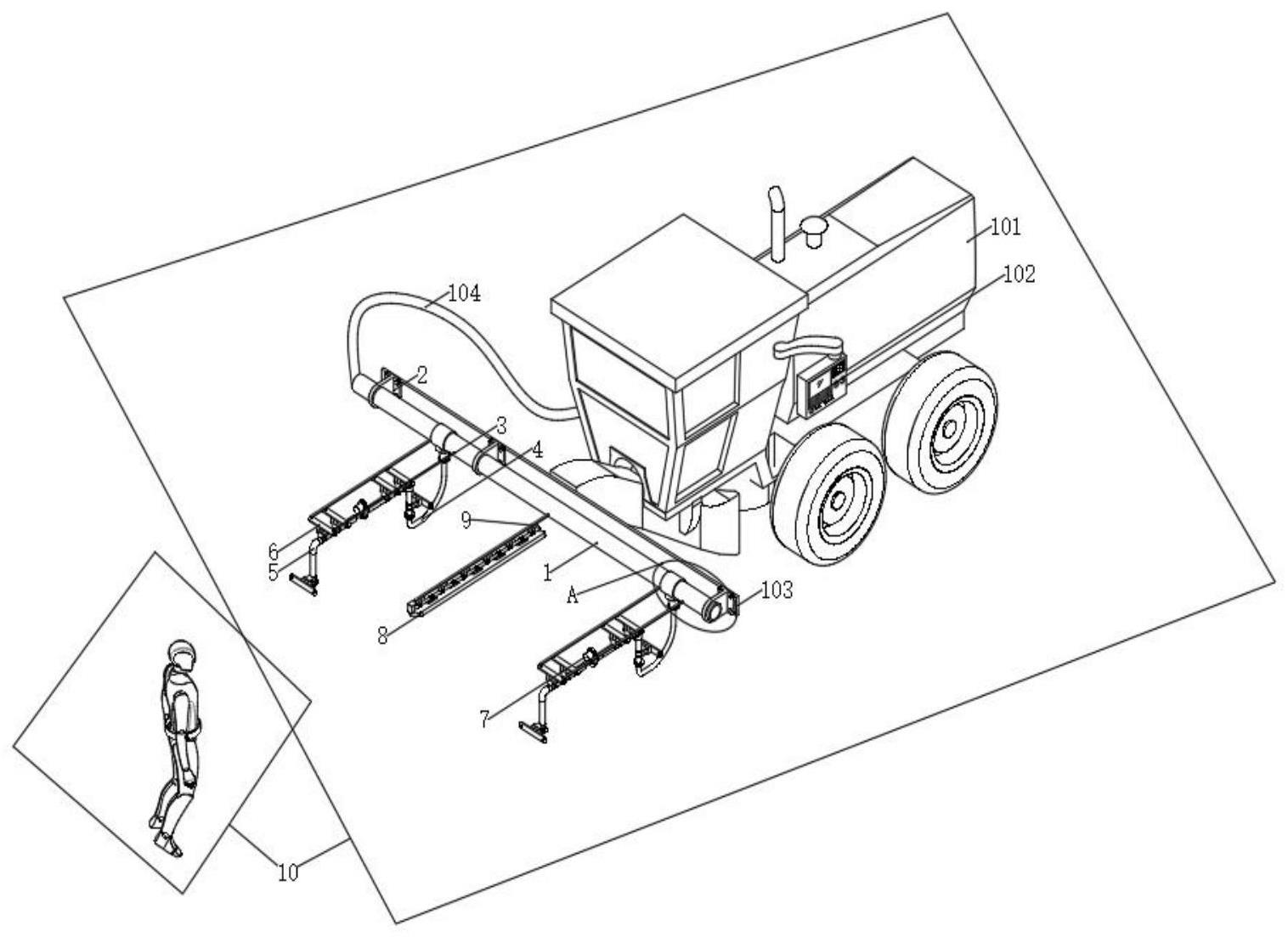
2、本发明一种基于人工智能制造技术的矿山喷淋设备,包括主水管,所述主水管的侧面固定套接有若干第一金属连接片,所述第一金属连接片的一端螺栓连接有固定架,所述固定架的一侧设置有卡车,所述卡车的一侧连接有调渡系统控制面板,所述主水管的一端通过连接管与卡车固定连接,所述主水管的顶端并位于两个第一金属连接片之间固定设有对接口,所述对接口通过法兰盘固定连接有软管,所述软管的另一端通过法兰盘固定连接有喷淋管组,所述喷淋管组的侧面固定套接有若干个第二金属连接片,所述喷淋管组上设有喷淋调向控制组件,且位于两个所述喷淋管组之间设有红外扫描组件,所述红外扫描组件上设有第三金属连接片;
3、所述喷淋管组包括第一l型管节、第二l型管节和中管节,所述中管节的一端与第一l型管节固定,所述中管节的另一端与第二l型管节固定;
4、所述喷淋调向控制组件包括翻转筒节、环形延伸卡节、从动齿轮、主动齿轮、防护壳和第一步进电机,所述翻转筒节活动于喷淋管组内部,所述环形延伸卡节固定于翻转筒节的外侧,所述环形延伸卡节固定于环形延伸卡节的外侧,所述主动齿轮设置于从动齿轮上方,并与从动齿轮啮合连接,所述第一步进电机固定于防护壳内部,且所述第一步进电机的输出轴通过联轴器与主动齿轮传动连接;
5、所述红外扫描组件包括转杆和红外扫描仪载板,所述红外扫描仪载板固定于转杆的底端,所述第三金属连接片活动连接于转杆的侧面。
6、作为本发明的一种优选技术方案,所述第一金属连接片、第二金属连接片和第三金属连接片上均开设有若干通孔。
7、作为本发明的一种优选技术方案,所述对接口的侧面固定套接有电磁阀,若干位于所述对接口上的电磁阀均为独立控制。
8、作为本发明的一种优选技术方案,所述第一l型管节和第二l型管节的结构相同并对称分布于中管节的两端,且所述第一l型管节和第二l型管节上均开设有若干个喷淋孔。
9、作为本发明的一种优选技术方案,所述喷淋孔与竖直方向上的夹角范围为-60°~60°,且五个所述喷淋孔形成一个喷淋组,位于同一个喷淋组上且位于相邻位置的两个所述喷淋孔之前的夹角为30°。
10、作为本发明的一种优选技术方案,所述中管节的管道内径小于第一l型管节的管道内径。
11、作为本发明的一种优选技术方案,所述环形延伸卡节包括依次固定的内卡环、环片和外卡环,且所述内卡环和外卡环的厚度均大于环片的厚度,所述内卡环与翻转筒节的中部固定,所述外卡环与从动齿轮的内侧固定,所述中管节的外侧设有套节,所述套节的中部开设有配合环片使用的环形通道,所述套节的两端均与防护壳固定。
12、作为本发明的一种优选技术方案,靠近所述转杆一端的第三金属连接片上固定连节有保护箱,所述保护箱的内部固定设有第二步进电机,所述第二步进电机的输出轴穿过保护箱并通过联轴器与转杆传动连接。
13、一种基于人工智能制造技术的矿山喷淋设备的控制方法,包括如下具体步骤:
14、步骤s1:搭建主水管并进行固定,然后根据电磁阀的位置对对应位置的对接口进行标记;
15、步骤s2:根据需要进行喷淋的位置固定喷淋管组,并在靠近喷淋管组处固定红外扫描组件;
16、步骤s3:将喷淋管组与附近位置的对接口进行对接;
17、步骤s4:建立喷淋供水的控制网络,并根据网络控制连接有喷淋管组的对接口上的电磁阀打开,此时水流从主水管中导入到对应的喷淋管组中;
18、步骤s5:在喷淋过程中,控制电磁阀的开关频率,在保证矿山巷道内足够湿度的条件下,避免巷道内部出现积水;
19、步骤s6:在喷淋过程中,红外扫描组件扫描并监测作业人员的通过位置,然后通过控制网络控制喷淋调向控制组件工作,实现对无作业人员通过的通道进行喷淋;
20、步骤s7:在红外扫描组件工作时,利用控制网络控制红外扫描组件的扫描角度,同时可在红外扫描组件处安装对应的温湿度传感器;
21、步骤s8:控制时段为矿山巷道进行喷淋工作,实现矿山巷道的湿度补足、降尘和降温的工作。
22、作为本发明的一种优选技术方案,根据所述步骤s8贪心算法:在洒水降尘车均速行驶情况下,矿区各监测点上报粉尘颗粒物检测结(pm2.5/pm10)后,粉尘颗粒物监测超标地点为目标点,基于狄克斯特拉(dijkstra)算法找出洒水降尘车出发点到目标点的耗时最短路径;洒水降尘车出发点到目标点完成一次洒水降尘结束后,监测点粉尘颗粒物检测结果(pm2.5/pm10)不再超标的监测点不再作为目标点,基于狄克斯特拉(dijkstra)算法重新计算洒水降尘车所在点为洒水降尘车出发点到下一个目标点的耗时最短路径,直至粉尘颗粒物监测超标目标点为0;存在多个目标点时,洒水降尘车选择路径耗时最短的目标点作为路线;洒水降尘车依据狄克斯特拉(dijkstra)算法规划的耗时最短路径行驶并洒水,洒水流量依据温湿度传感器数值进行调整,温湿度高于设定阈值则增加洒水流量,温湿度高于区域均温则增加洒水流量,温湿度低于设定阈值则减少洒水流量;调用矿山多个摄像头,上传至阿里云服务器,采用图像拼接apap算法拼接矿山整体道路俯视图;采用深度学习yolov5算法检测洒水降尘车及行人,并将检测框尺寸增大至1.2倍,当增大尺寸后的检测框相互覆盖时,判定有碰撞风险,此时阿里云服务器向车载终端发出警报信息同时控制车载蜂鸣器响起。
23、本发明的有益效果是:
24、1、该种基于人工智能制造技术的矿山喷淋设备及其控制方法,利用控制网络标记不同位置的电磁阀,并控制需要喷淋处的对应位置的喷淋管组进行喷淋工作,且通过控制网络控制电磁阀的打开频率,可有效控制喷淋工作对巷道湿度的影响,有效避免了框上巷道湿度过高或者巷道积水的情况;
25、2、该种基于人工智能制造技术的矿山喷淋设备及其控制方法,在实际喷淋时,可利用额外安装的温湿度传感器监测此处的温湿度,对湿度足够的喷淋区域,可利用控制网络控制对应的电磁阀关闭,降低了矿山作业在喷淋工作中的人员消耗;
26、3、该种基于人工智能制造技术的矿山喷淋设备及其控制方法,可根据矿山开采深度的实际情况,按对应的密度分布安装喷淋管组,且利用控制网络控制电磁阀的开闭程度,也可控制喷淋程度,提高了装置在针对矿山不同的开采深度时的实用性;
27、4、该种基于人工智能制造技术的矿山喷淋设备及其控制方法,当有作业人员经过喷淋位置时,利用红外扫描组件检测该位置的人员通过情况,并通过喷淋调向控制组件控制对应位置喷淋管组转环喷淋的方向,降低了作业人员行进的影响。
- 还没有人留言评论。精彩留言会获得点赞!