一种用于攀爬机器人的喷涂机构的制作方法
1.本实用新型涉及塔筒外壁维护设备技术领域,特别涉及一种用于攀爬机器人的喷涂机构。
背景技术:
2.在碳达峰、碳中和的大背景下,作为绿色能源风力发电,已在世界各地广为应用。风电塔筒由于长期裸露在自然环境中,经受风沙、各种腐蚀性物质的侵袭,钢铁塔筒外壁表面的涂装会污损、油漆会脱落,加快塔筒的锈蚀过程、缩短其工作寿命。因此,需要定期对塔筒外壁进行维护保养,延长塔筒工作寿命。目前国内比较普遍的做法是:工作人员先到塔顶,用固定在机舱上的绳索将工作 人员悬吊在塔筒外围进行工作,或工作人员在大型起重机的提升吊笼内工作。由于塔筒直径大、塔身高达几十米至上百米,同时风电场多建在自然环境恶劣的场所,工作人员高空作业风险大、劳动强度大、效率低、成本高。因此,迫切需要用机器人来代替人工进行高空作业。
3.机器人在对塔筒外壁进行维护保养时需要根据维护的具体位置来控制打磨机构和喷涂机构相应的转动,使打磨机构和喷涂机构依次转动到维护位置,采取对维护位置先将污损或锈蚀打磨掉再进行喷漆遮盖处打磨位置来减缓塔筒外壁的进一步损坏。
技术实现要素:
4.因此,针对上述的问题,本实用新型提出一种结构设计合理、操作简易、能代替人工完成高空喷涂作业的一种用于攀爬机器人的喷涂机构。
5.为解决上述技术问题,本实用新型采取的解决方案为:一种用于攀爬机器人的喷涂机构,包括底板、可上下运动设置于所述底板上方的安装板,还包括油漆喷嘴、第一悬臂杆、用于驱动油漆碰嘴转动的转动座,所述转动座可转动设置于所述安装板上,所述转动座的转动中心线垂直于所述安装板,所述第一悬臂杆一端可转动设置于所述转动座上,所述油漆喷嘴设置于所述第一悬臂杆的自由端上,所述转动座上设置有用于驱动所述第一悬臂杆转动的第一悬臂杆转动装置,所述安装板四个角与底板之间分别设置有用于缓冲支撑安装板的缓冲支撑装置,所述底板与所述安装板之间设置有用于驱动所述转动座转动且可适应底板与安装板相对缓冲运动的旋转机构。
6.进一步改进的是:第一悬臂杆转动装置为第一中空旋转平台,所述第一中空旋转平台的转动中心线平行于所述安装板,所述第一中空旋转平台的壳体固定设置于所述转动座上,所述第一悬臂杆设置于所述第一中空旋转平台的转动平台上。
7.进一步改进的是:所述缓冲支撑装置包括下支撑座、上支撑座、弹性伸缩杆,所述下支撑座设置于所述底板上表面,所述上支撑座设置于所述安装板下表面,所述弹性伸缩杆两端部分别设置于所述下支撑座与上支撑座上。
8.进一步改进的是:所述旋转机构包括开设于所述安装板上的转动口,所述转动口内可转动设置有内齿圈,所述内齿圈上端面设置有可随内齿圈转动的用于承载转动座的转
动安装板,所述转动座设置于所述转动安装板上,所述底板上设置有同时可适应底板与安装板相对缓冲运动驱动内齿圈转动的驱动机构。
9.进一步改进的是:所述安装板下端面位于转动口位置设置有用于转动支撑所述内齿圈的上圆形支撑块、下圆形支撑块,所述上圆形支撑块上端面设置于所述安装板下端面,所述下圆形支撑块上端面设置于所述上圆形支撑块下端面,所述内齿圈的外壁同时贴合所述上圆形支撑块、下圆形支撑块的内壁,所述下圆形支撑块上设置有用于支撑内齿圈防止内齿圈向下脱离的支撑装置,所述上圆形支撑块、下圆形支撑块与内齿圈之间设置有用于限制内齿圈相对上圆形支撑块、下圆形支撑块上下滑移的限位装置。
10.进一步改进的是:所述支撑装置为下圆形支撑块内壁下端部向内凸起的支撑凸沿,所述内齿圈下端面设置于所述支撑凸沿上。
11.进一步改进的是:限位装置包括内齿圈外壁沿径向向外凸起的半圆形限位凸起,所述上圆形支撑块的内壁下端部与下圆形支撑块的内壁上端部分别开设有供所述半圆形限位凸起伸入且与半圆形限位凸起贴合的上限位槽、下限位槽。
12.进一步改进的是:所述上圆形支撑块、下圆形支撑块外部罩设有固定套,所述固定套下端面开设有供部件穿过的操作口,所述上圆形支撑块、下圆形支撑块的外壁与所述固定套内壁贴合,所述固定套外壁上端一体设置有安装凸沿,所述安装凸沿上可拆装设置有若干用于与所述安装板连接相连接的连接件。
13.进一步改进的是:所述驱动机构包括驱动齿轮,所述驱动齿轮的轴向尺寸小于内齿圈的轴向尺寸,所述驱动齿轮可适应底板与安装板相对缓冲运动与所述内齿圈齿合,所述底板上设置有用于驱动所述驱动齿轮带动内齿圈转动的驱动装置。
14.进一步改进的是:所述驱动装置为电机,所述电机的壳体固定设置于所述底板上,所述电机的旋转轴与所述驱动齿轮连接。
15.通过采用前述技术方案,本实用新型的有益效果是:
16.1、第一悬臂杆与转动座之间设置有第一悬臂杆转动装置,非喷涂作业时第一悬臂杆转动装置驱动油漆喷嘴转动至远离塔筒外壁位置,避免油漆喷嘴影响攀爬机器人的其他操作,避免干涉相互串接的其他攀爬机器人的操作。
17.2、本实用新型中的驱动齿轮轴向尺寸小于内齿圈的轴向尺寸,可以适应底板与安装板间的相对运动平稳啮合转动,驱动转动安装板转动带动安装板上的转动座平稳转动,提高油漆喷涂的喷涂精度。
18.3、内齿圈外壁的半圆形限位凸起与上圆形支撑块、下圆形支撑块上的上限位槽、下限位槽配合,使得内齿圈在缓冲支撑装置的缓冲下不会和上圆形支撑块、下圆形支撑块发生位移,同时上限位槽与下限位槽的开设便于内齿圈和上圆形支撑块、下圆形支撑块配合安装。
19.4、第一悬臂杆为可任意弯折形变并定型的金属管,便于攀爬机器人串接时可以调整第一悬臂杆的曲度以调整第一悬臂杆转动范围,避免影响其他攀爬机器人的运作。
附图说明
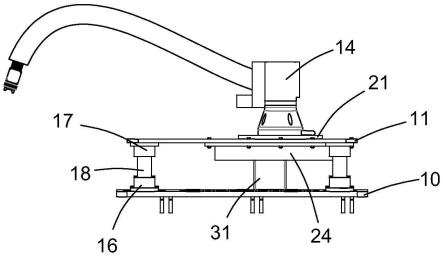
20.图1是本实用新型实施例一种用于攀爬机器人的喷涂机构的结构示意图。
21.图2是本实用新型实施例一种用于攀爬机器人的喷涂机构的结构示意图。
22.图3是本实用新型实施例一种用于攀爬机器人的喷涂机构的内部结构示意图。
23.图4是图3实用新型实施例一种用于攀爬机器人的喷涂机构中a处的局部结构放大图。
具体实施方式
24.现结合附图和具体实施例对本实用新型进一步说明。
25.参考图1至图4,本实用新型实施例所揭示的是一种用于攀爬机器人的喷涂机构,包括底板10、可上下运动设置于所述底板10上方的安装板11,还包括油漆喷嘴12、第一悬臂杆13、用于驱动油漆碰嘴转动的转动座14,所述转动座14可转动设置于所述安装板11上,所述转动座14的转动中心线垂直于所述安装板11,所述第一悬臂杆13一端可转动设置于所述转动座14上,所述油漆喷嘴12设置于所述第一悬臂杆13的自由端上,所述第一悬臂杆13为可任意弯折形变并定型的金属管,所述转动座14上设置有用于驱动所述第一悬臂杆13转动的第一悬臂杆13转动装置,所述安装板11四个角与底板10之间分别设置有用于缓冲支撑安装板11的缓冲支撑装置,所述底板10与所述安装板11之间设置有用于驱动所述转动座14转动且可适应底板10与安装板11相对缓冲运动的旋转机构。
26.第一悬臂杆13转动装置为第一中空旋转平台15,所述第一中空旋转平台15的转动中心线平行于所述安装板11,所述第一中空旋转平台15的壳体固定设置于所述转动座14上,所述第一悬臂杆13设置于所述第一中空旋转平台15的转动平台上。
27.所述缓冲支撑装置包括下支撑座16、上支撑座17、弹性伸缩杆18,所述下支撑座16设置于所述底板10上表面,所述上支撑座17设置于所述安装板11下表面,所述弹性伸缩杆18两端部分别设置于所述下支撑座16与上支撑座17上。
28.所述旋转机构包括开设于所述安装板11上的转动口19,所述转动口19内可转动设置有内齿圈20,所述内齿圈20上端面设置有可随内齿圈20转动的用于承载转动座14的转动安装板21,所述转动座14设置于所述转动安装板21上,所述安装板11下端面位于转动口19位置设置有用于转动支撑所述内齿圈20的上圆形支撑块22、下圆形支撑块23,所述上圆形支撑块22上端面设置于所述安装板11下端面,所述下圆形支撑块23上端面设置于所述上圆形支撑块22下端面,所述内齿圈20的外壁同时贴合所述上圆形支撑块22、下圆形支撑块23的内壁,所述上圆形支撑块22、下圆形支撑块23外部罩设有固定套24,所述固定套24下端面开设有供部件穿过的操作口,所述上圆形支撑块22、下圆形支撑块23的外壁与所述固定套24内壁贴合,所述固定套24外壁上端一体设置有安装凸沿25,所述安装凸沿25上可拆装设置有若干用于与所述安装板11连接相连接的连接件,所述连接件为螺栓和螺母。所述下圆形支撑块23上设置有用于支撑内齿圈20防止内齿圈20向下脱离的支撑装置,所述上圆形支撑块22、下圆形支撑块23与内齿圈20之间设置有用于限制内齿圈20相对上圆形支撑块22、下圆形支撑块23上下滑移的限位装置,所述底板10上设置有同时可适应底板10与安装板11相对缓冲运动驱动内齿圈20转动的驱动机构。
29.所述支撑装置为下圆形支撑块23内壁下端部向内凸起的支撑凸沿26,所述内齿圈20下端面设置于所述支撑凸沿26上。
30.限位装置包括内齿圈20外壁沿径向向外凸起的半圆形限位凸起27,所述上圆形支撑块22的内壁下端部与下圆形支撑块23的内壁上端部分别开设有供所述半圆形限位凸起
27伸入且与半圆形限位凸起27贴合的上限位槽28、下限位槽29。
31.所述驱动机构包括驱动齿轮30,所述驱动齿轮30的轴向尺寸小于内齿圈20的轴向尺寸,所述驱动齿轮30可适应底板10与安装板11相对缓冲运动与所述内齿圈20齿合,所述底板10上设置有用于驱动所述驱动齿轮30带动内齿圈20转动的驱动装置,所述驱动装置为电机31,所述电机31的壳体固定设置于所述底板10上,所述电机31的旋转轴与所述驱动齿轮30连接。
32.一种用于攀爬机器人的喷涂机构的使用方法:
33.攀爬机器人的前进或后退以及打磨机构和喷涂机构转动或工作中都会使的机器人发生晃动,触发柔性底盘上的缓冲支撑装置进行缓冲维持机器人的平稳,在缓冲的过程中安装板11与底板10会相对运动,带动内齿卷与驱动齿轮30沿轴向相对运动,驱动齿轮30的轴向尺寸小于内齿圈20的轴向尺寸,使得在相对运动过程中内齿卷与驱动齿轮30可以适应缓冲运动始终保持啮合转动状态,驱动转动安装板21带动油漆喷嘴12转动。
34.喷涂时第一悬臂杆13转动装置带动油漆喷嘴12转动使油漆喷嘴12的喷涂方向朝向塔筒外壁,非喷涂作业时第一悬臂杆13转动装置驱动油漆喷嘴12转动至远离塔筒外壁位置,避免油漆喷嘴12影响攀爬机器人的其他操作,避免干涉相互串接的其他攀爬机器人的操作。
35.以上显示和描述了本实用新型的基本原理和主要特征及其优点,本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内,本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1