一种基于机器视觉的汽车内饰喷胶设备的制作方法
1.本实用新型属于喷涂设备领域,具体涉及一种基于机器视觉的汽车内饰喷胶设备。
背景技术:
2.喷胶设备常用于对工件表面进行喷胶加工。传统的喷胶设备通常需要装载工具或工人直接将待喷胶工件安装到喷头附近,喷胶完成后再将工件取下,依次逐个完成喷胶。此种方式通常效率低、人力资源浪费情况严重。
3.随着科技的发展,一些新的喷胶设备会与输送设备相配合,依靠输送设备对工件进行输送喷胶。然而,传统的输送设备只有传送功能,并不支持在输送过程中对产品进行加工。且传统的输送设备的输送通道为条状,且存在严格的供料点和卸料点,即供料点和卸料点位于输送通道的两端,因此通常需要在卸料点和供料点处分别设置装载工具或工人。这会极大地影响加工效率,并且对人力资源也会造成一定的浪费。
技术实现要素:
4.本实用新型是为了解决上述问题而进行的,目的在于提供一种基于机器视觉的汽车内饰喷胶设备。
5.本实用新型提供了一种基于机器视觉的汽车内饰喷胶设备,具有这样的特征,包括:喷胶室;输送装置,用于对待喷胶工件进行输送,输送装置至少有一部分位于喷胶室内;喷胶装置,位于喷胶室内,用于对待喷胶工件进行喷胶。其中,输送装置包括输送部、滑台、感应组件、第一驱动组件以及定位组件。输送部包括多个输送单元。多个输送单元拼接组成闭合环形形状,输送部至少有一部分位于喷胶室内,输送单元包括两个平行设置的输送轨道,输送轨道为传动链条。
6.在本实用新型提供的基于机器视觉的汽车内饰喷胶设备中,还可以具有这样的特征:其中,滑台放置在两个输送轨道上,用于承托待喷胶工件,滑台的数量为多个,多个滑台依次排列设置在输送轨道上。
7.在本实用新型提供的基于机器视觉的汽车内饰喷胶设备中,还可以具有这样的特征:其中,定位组件用于将滑台定位在预定喷胶位置。定位组件包括至少一个气缸,该气缸设置在喷胶室内并用于对滑台的前部进行定位。
8.在本实用新型提供的基于机器视觉的汽车内饰喷胶设备中,还可以具有这样的特征:其中,第一驱动组件与输送部相连接,用于驱动输送部进行移动从而带动滑台移动,第一驱动组件包括与多个输送单元一一对应设置的多个电机。
9.在本实用新型提供的基于机器视觉的汽车内饰喷胶设备中,还可以具有这样的特征:其中,感应组件设置在喷胶室内,用于感应滑台是否到达喷胶室内的预定喷胶位置。
10.在本实用新型提供的基于机器视觉的汽车内饰喷胶设备中,还可以具有这样的特征:其中,感应组件为红外位置传感器。
11.在本实用新型提供的基于机器视觉的汽车内饰喷胶设备中,还可以具有这样的特征:其中,滑台上固定有至少一个仿形模胎,仿形模胎的形状与待喷胶工件的形状相适配。
12.在本实用新型提供的基于机器视觉的汽车内饰喷胶设备中,还可以具有这样的特征:其中,滑台上固定有复数个仿形模胎。
13.在本实用新型提供的基于机器视觉的汽车内饰喷胶设备中,还可以具有这样的特征:其中,喷胶装置包括:六轴式机器人,具有连接端和工作端;喷胶机构,与工作端连接,用于对待喷胶工件喷胶;移动机构,与连接端连接;以及限位导轨,用于引导移动机构沿该限位导轨移动,移动机构具有滑动组件以及第二驱动组件。滑动组件与限位导轨滑动连接。第二驱动组件用于驱动滑动组件沿限位导轨的延伸方向移动,进而带动六轴式机器人移动。
14.在本实用新型提供的基于机器视觉的汽车内饰喷胶设备中,还可以具有这样的特征:其中,滑动组件具有滑动平台以及移动滑块,滑动平台的一侧与移动滑块连接,另一侧与六轴式机器人连接,移动滑块套设在限位导轨上,该滑移动块与限位导轨相配合使得六轴式机器人沿限位导轨的延伸方向移动。限位导轨以及移动滑块的数量为两个,两个限位导轨相互平行,两个移动滑块分别套设在相对应的限位导轨上。第二驱动组件具有电机、丝杠、驱动滑块以及固定座,丝杠的一端与电机连接,另一端与固定座连接,驱动滑块套设在丝杠上,且与滑动平台连接。喷胶机构具有自动喷枪以及储胶组件,储胶组件用于存储喷胶用的胶液,自动喷枪用于喷出胶液,自动喷枪以及储胶组件连通设置。
15.实用新型的作用与效果
16.根据本实用新型所涉及的基于机器视觉的汽车内饰喷胶设备,因为包括:喷胶室;输送装置,用于对待喷胶工件进行输送,输送装置至少有一部分位于喷胶室内;喷胶装置,位于喷胶室内,用于对待喷胶工件进行喷胶。其中,输送装置包括输送部、滑台、感应组件、第一驱动组件以及定位组件。输送部包括多个输送单元。多个输送单元拼接组成闭合环形形状,输送部至少有一部分位于喷胶室内,输送单元包括两个平行设置的输送轨道,输送轨道为传动链条。
17.所以,本实用新型的基于机器视觉的汽车内饰喷胶设备中的输送装置不仅具有最基本的传送功能,而且在感应组件和定位组件的作用下,可以使滑台上的待加工工件到达一定位置后直接进行加工。且输送部为闭合环形形状,可以在位于喷胶室下游的操作工位上取下加工完成的工件,然后再放置新的待加工工件,从而实现批量喷胶。也可以在环形形状的线路上的任意位置设置装载工具或工人,实现高效率的加工过程。
18.此外,本实用新型的基于机器视觉的汽车内饰喷胶设备可以快速高效地进行多个工件的加工,大大提高了整体的加工效率。
附图说明
19.图1是本实用新型的实施例中基于机器视觉的汽车内饰喷胶设备的正视图;
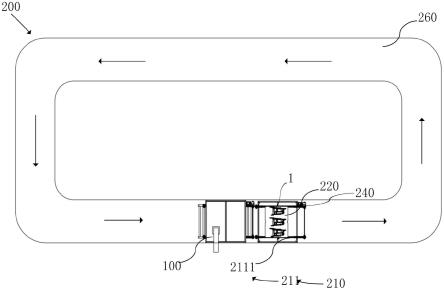
20.图2是本实用新型的实施例中基于机器视觉的汽车内饰喷胶设备中的输送装置的整体示意图;
21.图3是本实用新型的实施例中基于机器视觉的汽车内饰喷胶设备中的输送装置局部示意图;
22.图4是本实用新型的实施例中位于喷胶室内的输送单元和待喷胶工件的示意图;
23.图5是本实用新型的实施例中基于机器视觉的汽车内饰喷胶设备的中喷胶装置的结构示意图一;
24.图6是本实用新型的实施例中基于机器视觉的汽车内饰喷胶设备的中喷胶装置的结构示意图二;
25.图7是本实用新型实施例中喷胶装置的移动机构的结构示意图;
26.图8是本实用新型实施例中喷胶装置的第二驱动组件的结构示意图。
具体实施方式
27.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,以下实施例结合附图对本实用新型基于机器视觉的汽车内饰喷胶设备作具体阐述。
28.本实施例提供了一种基于机器视觉的汽车内饰喷胶设备1000。
29.图1是本实施例中基于机器视觉的汽车内饰喷胶设备的正视图。
30.如图1所示,本实施例的基于机器视觉的汽车内饰喷胶设备1000包括喷胶室100、输送装置200以及喷胶装置300。
31.图2是本实施例中基于机器视觉的汽车内饰喷胶设备中的输送装置的整体示意图。
32.图3是本实施例中基于机器视觉的汽车内饰喷胶中的输送装置局部示意图。
33.图4是本实施例中位于喷胶室内的输送单元和待喷胶工件的示意图。
34.如图2~图4所示,输送装置200包括输送部210、滑台220、感应组件230、第一驱动组件240以及定位组件250。
35.输送部210包括多个输送单元211,多个输送单元211拼接组成闭合环形线路260,输送部210有一部分位于喷胶室100内。本实施例中,输送单元211的数量为16个。
36.输送单元211包括两个平行设置的输送轨道2111,本实施例中的输送轨道2111为传动链条。
37.滑台220放置在两个输送轨道上211,滑台220上固定有三个仿形模胎,仿形模胎的形状与待喷胶工件1的形状相适配,从而承托待喷胶工件1。滑台220的数量为多个,多个滑台220依次排列设置在输送轨道2111上。本实施例中滑台220的数量为16个。
38.第一驱动组件240与输送部210相连接,用于驱动输送部210进行移动从而带动滑台220移动。第一驱动组件240包括与多个输送单元211一一对应设置的多个电机。本实施例中,电机的数量为16个。
39.感应组件230设置在喷胶室100内,用于感应滑台220是否到达喷胶室100内的预定喷胶位置。本实施例中的感应组件230为红外位置传感器。
40.定位组件250用于将滑台220定位在预定喷胶位置。本实施例中,定位组件250包括一个气缸,该气缸设置在喷胶室100内并用于对滑台220的前部进行定位。本实施例中的滑台220前部具有一个凹槽,当滑台220到达预定喷胶位置时,气缸顶起与凹槽的形状相适配从而卡住滑台220,实现定位。
41.图5是本实施例中基于机器视觉的汽车内饰喷胶设备的中喷胶装置的结构示意图一。
42.图6是本实施例中基于机器视觉的汽车内饰喷胶设备的中喷胶装置的结构示意图
二。
43.如图5和图6所示,喷胶装置300包括六轴式机器人310、喷胶机构320、移动机构330、限位导轨340以及底座360。
44.六轴式机器人310具有连接端311、工作端312以及机器人安装座313。连接端311与移动机构330连接。六轴式机器人310的末端为其工作端312。工作端312通过机器人安装座313与喷胶机构320连接。
45.喷胶机构320用于对汽车内饰进行喷胶,设置在机器人安装座313上。该喷胶机构320的结构为现有且常见的喷胶机构的结构。喷胶机构320具有自动喷枪321以及储胶组件(图中未示出)。储胶组件(图中未示出)用于存储喷胶用的胶液,自动喷枪321用于喷出胶液,自动喷枪321以及储胶组件连通设置。
46.图7是本实施例中喷胶装置的移动机构的结构示意图。
47.如图7所示,移动机构330具有滑动组件331以及第二驱动组件332。
48.滑动组件331与限位导轨340滑动连接。滑动组件331具有滑动平台3311以及移动滑块3312。滑动平台3311的一侧与移动滑块3312连接,另一侧与六轴式机器人310连接。移动滑块3312的数量为两个。两个移动滑块3312分别套设在相对应的两个限位导轨340上,该移动滑块3312与限位导轨340相配合,使得设置在滑动平台3311上的六轴式机器人310水平移动。
49.图8是本实施例中喷胶装置的第二驱动组件的结构示意图。
50.如图8所示,第二驱动组件332具有电机3321、丝杠3322、驱动滑块3323以及固定座3324。该第二驱动组件332用于驱动滑动组件331沿限位导轨340的延伸方向运动,进而带动六轴式机器人310运动。丝杠3322的一端与电机3321连接,另一端与固定座3324连接。固定座3324设置在底座360上。驱动滑块3323套设在丝杠3322上,且与滑动平台3311连接。在电机3321的驱动下丝杠3322与驱动滑块3323相配合使得滑动平台3311沿限位导轨340的延伸方向运动。
51.限位导轨340设置在底座360上。限位导轨340数量为两个,且两个限位导轨340相互平行。
52.本实施例中的基于机器视觉的汽车内饰喷胶设备1000的工作过程为:
53.输送单元211在驱动组件240的驱动作用下沿着图3所示的箭头方向进行移动,从而带动滑台220进行运动。
54.当滑台220上的待喷胶工件1到达喷胶室100内的预定喷胶位置时,感应组件230发生感应,驱动组件240停止工作,输送单元211停止移动,同时定位组件250中的气缸顶起从而顶住滑台220前部,喷胶室100内的喷胶装置300对待喷胶工件1进行喷胶。
55.喷胶完毕后气缸下移,同时驱动组件240继续工作,输送单元211继续移动。
56.喷胶完成的工件1到达喷胶室100的下游被取下,替换为待加工的工件1,实现批量喷胶。或者也可以将整个滑台220取下,替换新的装有仿形模胎和工件1的滑台220。
57.同时,环形线路260上的任意位置也可分别设置装载工具或工人,实现高效率的装载和加工运输过程。
58.实施例的作用与效果
59.根据本实施例所涉及的基于机器视觉的汽车内饰喷胶设备,因为包括:喷胶室;输
送装置,用于对待喷胶工件进行输送,输送装置至少有一部分位于喷胶室内;喷胶装置,位于喷胶室内,用于对待喷胶工件进行喷胶。其中,输送装置包括输送部、滑台、感应组件、第一驱动组件以及定位组件。输送部包括多个输送单元。多个输送单元拼接组成闭合环形形状,输送部至少有一部分位于喷胶室内,输送单元包括两个平行设置的输送轨道,输送轨道为传动链条。
60.所以,本实施例的基于机器视觉的汽车内饰喷胶设备中的输送装置不仅具有最基本的传送功能,而且在感应组件和定位组件的作用下,可以使滑台上的待加工工件到达一定位置后直接进行加工。且输送部为闭合环形形状,可以在位于喷胶室下游的操作工位上取下加工完成的工件,然后再放置新的待加工工件,从而实现批量喷胶。也可以在环形形状的线路上的任意位置设置装载工具或工人,实现高效率的加工过程。
61.此外,本实施例中的输送单元包括两个平行设置的输送轨道,滑台放置在并行设置的输送轨道上,实现更稳定的承托。且输送轨道为传动链条,使输送过程更为流畅。
62.此外,本实施例中滑台的数量为多个,且每个滑台可以承托三个工件,实现了批量快速加工。大大提高了整体的加工效率。
63.此外,定位组件中的气缸通过顶住滑台前部进行定位,使得定位位置更加准确,加工效果更好。
64.此外,第一驱动组件包括多个和输送单元数量相同的电机,一一对应的驱动设计使得传送速度更快,且若某一个输送单元发生故障时仍可继续输送,不会影响整体的输送过程。
65.此外,本实施例的喷胶装置,通过在六轴式机器人的连接端设置移动机构,从而使得六轴式机器人在更大范围内进行工作,本实施例的喷胶装置结构简单,易于安装。
66.此外,本实施例的喷胶装置,限位导轨以及移动滑块的数量均为两个,相比于仅具有一个限位导轨以及一个配套的移动滑块,本实施例的喷胶装置可以使得整个喷胶装置更为稳定。
67.上述实施方式为本实用新型的优选案例,并不用来限制本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1