一种用于涂胶施工设备的电控系统的制作方法
1.本实用新型涉及控制领域,特别涉及一种用于涂胶施工设备的电控系统。
背景技术:
2.在路面施工时,为了既改善地面使用条件,又延长路面的工作寿命,通常对路面喷涂防滑路面胶水,防滑路面胶水与基面有极高的粘结强度,且柔韧性好、耐磨防滑、耐水、耐老化、耐各类介质的腐蚀。在现有技术中,一般采用人工方式进行涂胶操作,但人工方式不仅效率低下,而且还存在涂抹不均匀的情况。
3.为解决上述技术问题,出现了用于实现自动涂胶的涂胶设备,涂胶设备作为路面铺装工艺中所使用的一种施工设备,具体可参考如专利号为zl201921060737.7(授权公告号为cn210288064u)的中国实用新型专利公开了一种路面坑侧壁喷涂机械,该专利中的涂胶设备设有能驱动该悬臂架水平移动的水平滑移机构以及涂胶出料机构(即:涂胶机构),以通过启动水平滑移机构,使得喷涂嘴的喷出口与待涂胶位置靠近,最终通过启动出料机构而完成涂胶。当然,上述涂胶设备中还通过行走机构控制其设备行走,以满足不同位置的路面喷涂,但由于现有技术中这种涂胶设备中的行走机构、涂胶机构、出料机构并未公开具体的电控系统,而实际上这些机构最普遍的控制方法为:采用单独的电气控制(例如:将各个机构与对应的按钮相连接),这样需要某个机构需要工作时,则打开对应的按钮,为此该方法的电气控制复杂,同时并不能实现涂胶机构和出料机构之间的配合,一旦出料机构出的胶水未及时使用时则会造成胶水凝固的情况,同时出料机构出料过多时则涂胶机构涂胶也会过多,故会影响涂胶效果。为此需要进一步改进。
技术实现要素:
4.本实用新型所要解决的技术问题是针对上述现有技术提供一种能实现涂胶和出料操作配合的用于涂胶施工设备的电控系统。
5.本实用新型解决上述技术问题所采用的技术方案为:一种用于涂胶施工设备的电控系统,包括:
6.执行模块,包括用于控制涂胶机构动作的第一执行单元;
7.电源模块,与执行模块相连接;
8.其特征在于:还包括有:
9.第一控制单元,与第一执行单元和出料机构的控制端相连接,用于分别控制第一执行单元和出料机构开启或关闭;
10.计时模块,与第一控制单元相连接,用于对出料机构的开启时间进行计时并将其计时结果反馈给第一控制单元;
11.所述第一控制单元并被配置为:同时开启第一执行单元和出料机构,并根据计时模块反馈的计时结果控制关闭第一执行单元的动作。
12.进一步地,所述第一控制单元包括用于控制出料机构出胶的开关和第一继电器,
所述第一继电器具有第一线圈、第一常闭触点和至少两个第一常开触点,所述开关和第一继电器的第一线圈串联组成第一支路,所述第一继电器的每个第一常开触点分别对应地与出料机构的控制端和第一执行单元相连接,以分别组成出料机构的控制支路和涂胶机构的控制支路;所述出料机构的控制支路、涂胶机构的控制支路和第一支路并联在电源模块的两端。
13.为使实现更加简单,还包括内置有计时模块的断电延时继电器,所述断电延时继电器包括第二线圈和第二常闭触点,所述第一常闭触点与第二线圈相串联后并与所述涂胶机构的控制支路相并联,所述第二常闭触点串联于涂胶机构的控制支路中。
14.所述涂胶机构的控制支路中还包括第二继电器,所述第二继电器包括第三线圈和两个第二常开触点,所述第一常开触点和一个第二常开触点相并联并与第二常闭触点和第三线圈相串联而组成涂胶机构的控制支路,另一个常开触点与第一执行单元相连接。
15.所述出料机构的控制支路中还包括设于出料机构上并作为出料机构的控制端的至少一个出胶阀,各个所述出胶阀与第一继电器对应的第一常开触点相串联并连接在电源模块两端。
16.另外为实现该涂胶施工设备可行走,避免人工搬运,所述执行模块还包括用于控制行走机构动作的第二执行单元,所述第二执行单元还连接有第二控制单元。
17.为使操作更加便捷,优选地,所述第二控制单元包括遥控操作电路,所述遥控操作电路包括遥控接收器以及至少一个继电器,每个继电器均包括线圈和随线圈动作的触点,所述遥控接收器设有多个控制端,每个继电器的线圈均与对应的控制端相串联在电源模块上以构成一个控制回路,每个控制回路均相并联。
18.为控制行走机构向左和向右,所述控制回路中包括用于控制行走机构向左的第一控制回路和用于控制行走机构向右的第二控制回路,所述第一控制回路中的继电器和第二控制回路中的继电器分别为第三继电器和第四继电器,所述第三继电器具有第四线圈、第三常开触点和第三常闭触点,所述第四继电器具有第五线圈、第四常开触点和第四常闭触点,所述第四常闭触点、第三常开触点和第四线圈串联在电源模块的两端组成左行控制回路,所述第三常闭触点、第四常开触点和第五线圈串联在电源模块的两端组成右行控制回路。
19.进一步地,所述控制回路还包括用于控制行走机构前进的第三控制回路、用于控制行走机构后退的第四控制回路和用于控制行走机构停止的第五控制回路,所述第三控制回路中的继电器、第四控制回路中的继电器和第五控制回路中的继电器分别为第五继电器、第六继电器和第七继电器,所述第五继电器具有第六线圈和第五常开触点,所述第六继电器具有第七线圈和第六常开触点,所述第七继电器具有第八线圈和第五常闭触点,所述第六线圈、第五常开触点和第五常闭触点串联在电源模块两端,所述第七线圈、第六常开触点和第五常闭触点串联在电源模块两端。
20.进一步地,所述第二控制单元还包括电控操作电路,所述电控操作电路包括用于控制行走机构左行的第八继电器和用于控制行走机构右行的第九继电器,所述第八继电器具有第九线圈和第七常开触点,所述第九继电器具有第十线圈和第八常开触点,所述第九线圈和第三常闭触点串联在电源模块两端,所述第十线圈和第四常闭触点串联在电源模块两端,所述第七常开触点和第八常开触点分别设于第二执行单元相连接,以用于控制行走
机构左行或右行。
21.与现有技术相比,本实用新型的优点在于:通过设置与第一执行单元和出料机构的控制端相连接的第一控制单元,从而实现涂胶机构和出料机构能同时通过第一控制单元控制,并通过计时模块对出料机构的开启时间进行计时,以使第一控制单元根据计时模块反馈的计时结果控制关闭第一执行单元的动作。因此该电控系统能保证出胶和涂胶操作之间的配合更加好,减少出胶和涂胶两操作之间配合度不高时而造成的出胶过多情况,无需人为控制出胶和涂胶操作之间的配合关系,减少施工时间,保证施工质量。
附图说明
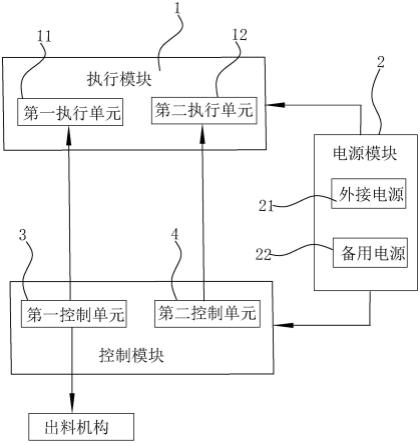
22.图1为本实用新型实施例中用于涂胶施工设备的电控系统原理框图;
23.图2为图1中电源模块的电路图;
24.图3为图1中第二控制单元的电路图;
25.图4为图1中第一控制单元的电路图。
具体实施方式
26.以下结合附图实施例对本实用新型作进一步详细描述。
27.涂胶施工设备包括行走机构、涂胶机构和出料机构,其中行走机构是为了无需人工搬运,而使涂胶施工设备实现不同位置的涂胶,出料机构为用于存储胶水,涂胶机构为用于执行涂胶工作的机构,该实施例中是针对现有技术中的涂胶施工设备,在此不再对涂胶施工设备的具体结构展开赘述,可参考如背景技术中给出的专利号为zl201921060737.7(授权公告号为cn210288064u)的中国实用新型专利公开的一种路面坑侧壁喷涂机械。
28.如图1~4所示,本实施例中的用于涂胶施工设备的电控系统包括执行模块1、控制模块以及与执行模块1和控制模块相连接的电源模块3。其中执行模块包括用于控制涂胶机构动作的第一执行单元11和用于控制行走机构动作的第二执行单元12;控制模块包括第一控制单元3和第二控制单元4,第一控制单元3与第一执行单元11和出料机构的控制端相连接,用于分别控制第一执行单元11和出料机构开启或关闭,计时模块与第一控制单元3相连接,用于对出料机构的开启时间进行计时并将其计时结果反馈给第一控制单元3;第一控制单元3并被配置为:同时开启第一执行单元11和出料机构,并根据计时模块反馈的计时结果控制关闭第一执行单元11的动作;第二控制单元4与第二执行单元12相连接。
29.本实施例中的电源模块2包括用于供电的外接电源21和/或备用电源22,如图2中所示,外接电源21为涂胶施工设备上卷线器插头,即可将外部电通入到该涂胶施工设备中,备用电源22为设于涂胶施工设备中的发电机g1,从而在外接电源21断电时能为该涂胶施工设备供电,当然电源回路上还具有电源保护开关qf1。
30.另外如图2所示,电源模块2还连接有供电输出模块23,供电输出模块23包括变压器t1、与变压器t1的初级绕组相连接的第三接触器km3以及与变压器t1的次级绕组相连接的第四接触器km4,第三接触器km3的另一端还与电源模块3的输出端相电连接,第四接触器km4的其中一触点与第一接触器km1相电连接,第四接触器km4的另一端则对应为供电输出模块23的输出端。图2中的x2为插座,即可使涂胶施工设备具有供电能力,在其他设备需要供电时可直接插入到插座x2中。
31.如图2所示,本实施例中的第一执行单元11包括用于控制涂胶机构工作的第一驱动电机m1和与该第一驱动电机m1相连接的第一变频器v1;第二执行单元12包括用于控制行走机构向左行走的第二驱动电机m2、用于控制行走机构向右行走的第三驱动电机m3以及与第二驱动电机m2和第三驱动电机m3相连接的第二变频器v2。
32.本实施例中的第二控制单元4包括遥控操作电路41,如图3所示,遥控操作电路41包括遥控接收器u1以及至少一个继电器,每个继电器均包括线圈和随线圈动作的触点,遥控接收器u1设有多个控制端,每个继电器的线圈均与对应的控制端相串联在电源模块2上以构成一个控制回路,每个控制回路均相并联。
33.涂胶施工设备在使用时,行走机构最常用的操作为:向左行走、向右行走、转弯、前进、后退和停止,为此本实施例中的控制回路包括用于控制行走机构向左行走的第一控制回路、用于控制向右行走的第二控制回路、控制行走机构前进的第三控制回路、用于控制行走机构后退的第四控制回路和用于控制行走机构停止的第五控制回路。其中,第一控制回路中的继电器和第二控制回路中的继电器分别为第三继电器和第四继电器,所述第三继电器具有第四线圈ka1、第三常开触点ka11和第三常闭触点ka12,第四继电器具有第五线圈ka2、第四常开触点ka21和第四常闭触点ka22,所述第四常闭触点ka22、第三常开触点ka11和第四线圈ka1串联在电源模块3的两端组成左行控制回路,第三常闭触点ka12、第四常开触点ka21和第五线圈ka2串联在电源模块3的两端组成右行控制回路。第三控制回路中的继电器、第四控制回路中的继电器和第五控制回路中的继电器分别为第五继电器、第六继电器和第七继电器,第五继电器具有第六线圈ka4和第五常开触点ka41,第六继电器具有第七线圈ka5和第六常开触点ka51,第七继电器具有第八线圈ka6和第五常闭触点ka61,第六线圈ka4、第五常开触点ka41和第五常闭触点ka61串联在电源模块2两端,第七线圈ka5、第六常开触点ka51和第五常闭触点ka61串联在电源模块2两端。
34.该第二控制单元4还包括电控操作电路42,电控操作电路42包括用于控制行走机构左行的第八继电器和用于控制行走机构右行的第九继电器,第八继电器具有第九线圈km6和第七常开触点km61,第九继电器具有第十线圈km7和第八常开触点km71,第九线圈km6和第三常闭触点ka12串联在电源模块2两端,第十线圈km7和第四常闭触点ka22串联在电源模块2两端,第七常开触点km61和第八常开触点km71分别设于第二执行单元12相连接,以用于控制行走机构左行或右行。
35.如图4所示,第一控制单元3包括用于控制出料机构出胶的开关sa1、第一继电器和内置有计时模块的断电延时继电器,第一继电器具有第一线圈kb1、第一常闭触点kb12和至少两个第一常开触点kb11,开关sa1和第一继电器的第一线圈kb1串联组成第一支路33,第一继电器的每个第一常开触点kb11分别对应地与出料机构的控制端和第一执行单元11相连接,以分别组成出料机构的控制支路31和涂胶机构的控制支路32;出料机构的控制支路31、涂胶机构的控制支路32和第一支路33并联在电源模块2的两端。断电延时继电器包括第二线圈kt1和第二常闭触点kt11,第一常闭触点kb12与第二线圈kt1相串联后并与涂胶机构的控制支路32相并联,第二常闭触点kt11串联于涂胶机构的控制支路32中。
36.涂胶机构的控制支路32中还包括第二继电器,第二继电器包括第三线圈kb2和两个第二常开触点kb21,第一常开触点kb11和一个第二常开触点kb21相并联并与第二常闭触点kt11和第三线圈kb2相串联而组成涂胶机构的控制支路32,另一个常开触点kb21与第一
执行单元11相连接。
37.出料机构的控制支路31中还包括设于出料机构上并作为出料机构的控制端的至少一个出胶阀y1,各个出胶阀y1与第一继电器对应的第一常开触点kb11相串联并连接在电源模块2两端。本实施例中出胶阀y1为三个。
38.电控操作电路42还包括电源输入切换开关sa1,电源输入切换开关sa1具有第一切换开关sa1-1和第二切换开关sa1-2,第一切换开关sa1-1和第二切换开关sa1-2始终保持只有一路开关关闭,另一路开关打开,当第一切换开关sa1-1关闭时,继电器km1的线圈得电,继电器km1的常闭触点断开,常开触点关闭(即:备用电源未工作,外接电源工作),当第二切换开关sa1-2关闭时,继电器km2的线圈得电,继电器km2的常闭触点断开,常开触点关闭(即:备用电源工作,外接电源不工作),在继电器km2的线圈得电时(即:备用电源工作时),继电器km2常开触点关闭,用于控制变压器的第三接触器km3和输出切换控制的第四接触器km4的线圈均得电,这样第三接触器km3的常开开关和第四接触器km4的常开开关均关闭而能使该插座x2有输出。另外电控操作电路42还包括用于控制执行模块的继电器km5,该继电器km5的常开触点与第一执行单元11和第二执行单元12相连接。
39.上述电控系统的工作过程:
40.1、涂胶机构和出料机构的工作过程:
41.当开关sa1关闭时,第一线圈kb1得电,第一常闭触点kb12断开,第一常开触点kb11关闭,这样三个出胶阀y1均开始工作,同时第三线圈kb2得电,第二常开触点kb21关闭,从而在断电延时继电器时间到期前能保证第三线圈kb2始终得电,以使而使第一变频器v1工作(即涂胶机构工作),直至当断电延时继电器时间到后,第二常闭触点kt11断开,此时第三线圈kb2失电,第一变频器v1不工作。因此该电控系统无需人为控制出胶和涂胶操作之间的配合,通过断电延时继电器设定的时间而保证每次出胶量相同、涂胶时间也相同;
42.2、行走机构的工作过程:
43.遥控接收器u1上未接收到联动信号(即:继电器ka3未得电)时,常闭触点ka31保持闭合状态,此时则通过遥控接收器u1接收到行走机构的行走信号(第四线圈ka1或第五线圈ka2通电)时,由于第三常闭触点ka12与第五线圈ka2的线圈相连接,第四常闭触点ka22与第四线圈ka1相连接,为此只能使左行控制回路和右行控制回路中的其中一个工作,不能使左行控制回路和右行控制回路同时工作,因此当第四线圈ka1得电时,则第三常闭触点k12断开,即第十线圈km7失电,第九线圈km6得电,与第二驱动电机m2相连接的第七常开触点km61即闭合,第二驱动电机m2开始工作是行走机构向左行走;反之,当第五线圈ka2得电时,则第四常闭触点ka22断开,即:第九线圈km6失电,第十线圈km7得电,与第三驱动电机m3相连接的第八常开触点km71即闭合,第三驱动电机m3开始工作是行走机构向右行走。
44.遥控接收器u1上接收到联动信号(即:继电器ka3得电)时,常闭触点ka31为断开状态,此时则左行控制回路和右行控制回路始终保持不能工作的状态,为此第三常闭触点ka12和第四常闭触点ka22始终为闭合状态,第九线圈km6和第十线圈km7得电,从而使第七常开触点km61和的第八常开触点km71同时闭合,第二驱动电机m2和第三驱动电机m3同时被驱动,这样行走机构执行转弯操作。
45.当然,只要第八线圈ka6未得电时,遥控接收器u1上即可以接收到前进信号(第六线圈ka4得电)或后退信号(第七线圈ka5得电)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1