一种涂布模头闭环调节装置的制作方法
本技术涉及涂布机及涂布机配件,具体涉及一种涂布模头闭环调节装置。
背景技术:
1、狭缝挤压涂布作为一种精密的湿式涂布技术,工作原理为浆料在一定压力一定流量下沿着涂布模头的缝隙挤压喷出而转移到基材上。相比其它涂布方式,具有很多优点,如涂布速度快、精度高、湿厚均匀;涂布系统封闭,在涂布过程中能防止污染物进入,浆料利用率高、能够保持浆料性质稳定,并能适应不同浆料粘度和固含量范围.
2、现在的涂布模头由上模头、下模头、流量调节机构及夹合在其中的垫片构成,垫片的高度决定了涂布狭缝的高度,在涂布过程中,由于浆料温度或黏度待因素影响,涂层的厚度不均一,需要对涂层厚度进行调节,
3、现有技术中,通过在涂布模头的上设置手动的流量调节机构,对垫片的高度进行调整,以调节涂布狭缝中流量,从而实现对涂层的厚度进行调节。通过手动调节,受人为因素的影响,调节误差较大,容易出现调节不到位或调节过量的情况,从而导致涂布厚度不均,涂布质量差,此外,人工操作调节,导致调节效率低下,不利于自动化生产。
技术实现思路
1、因此,本实用新型的目的在于提供一种涂布模头闭环调节装置,以解决现有技术中人工操作导致的调节误差大,涂布厚度不均,涂布质量差的问题
2、为解决上述技术问题,本实用新型的技术方案如下:
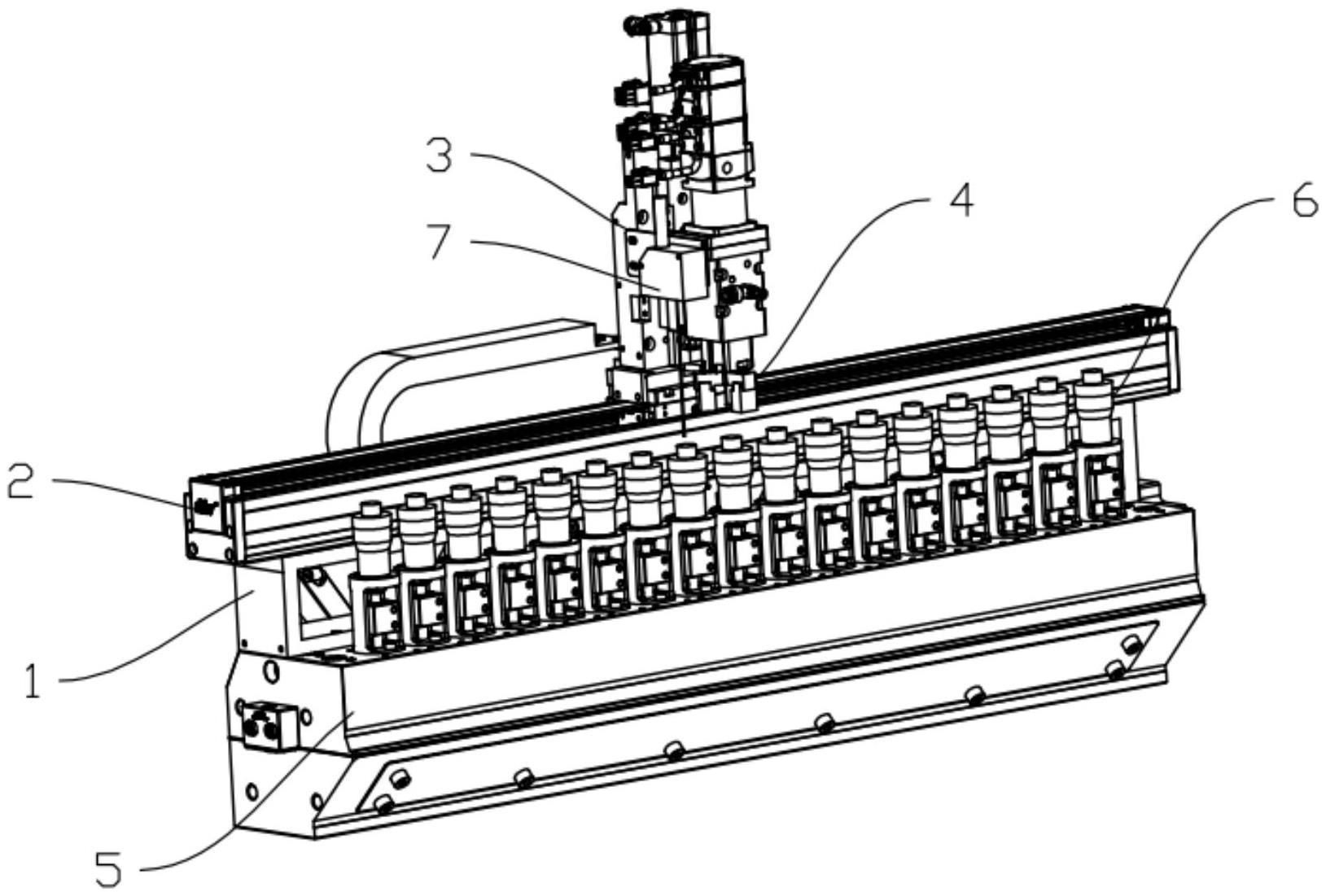
3、一种涂布模头闭环调节装置,包括:支架、水平运动模组、竖直运动模组、旋转模组、感应元件和控制系统;支架的长度方向与涂布模头上的多个流量调节机构的布设方向一致;水平运动模组设于所述支架上,所述水平运动模组的滑移端沿所述支架的长度方向做水平直线往复运动;竖直运动模组包括设置于所述滑移端上的第一驱动机构,以及与所述第一驱动机构的输出端传动连接的竖直垫板,所述竖直垫板相对于滑移端在竖直方向上做滑移运动;旋转模组装设于所述竖直垫板上,所述旋转模组上设有适于带动所述流量调节机构定量转动的旋转夹持件;控制系统设置于所述支架上,所述水平运动模组、所述竖直运动模组和所述旋转模组均与控制系统通信连接,所述控制系统适于控制所述水平运动模组、所述竖直运动模组和所述旋转模组的启停;感应元件固定安装于所述旋转模组上,并与所述控制系统通信连接,所述感应元件适于测定所述流量调节机构至所述旋转模组之间的距离参数,并反馈至所述控制系统以控制所述竖直运动模组的启停。
4、根据本实用新型的一些实施例,所述水平运动模组为直线电机,所述滑移端设有水平垫板,所述竖直运动模组固定安装于所述水平垫板上,所述滑移端的滑移方向与所述支架的长度方向一致,所述水平垫板随所述滑移端滑移以带动所述竖直运动模组水平滑移。
5、根据本实用新型的一些实施例,所述水平运动模组为滚珠丝杆直线模组或同步带直线模组。
6、根据本实用新型的一些实施例,所述竖直运动模组还包括垂直固定于所述水平垫板上的背板,所述第一驱动机构固定于所述背板顶部,所述竖直垫板滑动安装于所述背板面向所述流量调节机构的一侧,所述驱动机构的输出端与所述竖直垫板传动连接,以驱动所述竖直垫板在所述背板上竖直滑移。
7、根据本实用新型的一些实施例,所述背板面向所述流量调节机构的侧面上设有竖直导轨,所述竖直垫板与所述竖直导轨配合连接。
8、根据本实用新型的一些实施例,所述第一驱动机构为气缸。
9、根据本实用新型的一些实施例,所述旋转模组还包括固定安装于所述竖直垫板上的第二驱动机构,所述第二驱动机构与所述旋转夹持件传动连接,所述第二驱动机构驱动所述旋转夹持件旋转。
10、根据本实用新型的一些实施例,所述旋转夹持件包括与所述第二驱动机构传动连接的旋转手指气缸和夹爪,所述旋转手指气缸驱动所述夹爪进行夹紧或放松。
11、根据本实用新型的一些实施例,所述支架固定安装于所述涂布模头上。
12、根据本实用新型的一些实施例,所述感应元件为激光位移传感器。
13、本实用新型技术方案,具有如下优点:
14、本实用新型提供的涂布模头闭环调节装置,水平运动模组固定于支架上,水平运动模组的滑移端与竖直运动模组固定连接,竖直运动模组的竖直垫板上固定连接有旋转模组;当涂布模头上的流量调节机构需要调节时,根据定位待调节流量调节机构的位置,控制系统控制水平运动模组的滑移端沿支架的长度方向做水平直线往复运动,带动竖直运动模组和旋转模组滑移至对应的流量调节机构位置处;当水平运动模组与待调节的流量调节机构的位置相对应时,旋转模组上设置的感应元件测定该流量调节机构至旋转模组之间的距离参数,并将该距离参数反馈至控制系统,进而控制竖直垫板相对于滑移端在竖直方向上做滑移运动,带动旋转模组做升降运动,以使得旋转模组的旋转夹持件与流量调节机构连接,带动流量调节机构定量转动,以达到调节流量的目的;起到精准定位调节的作用,避免调节过量,实现精准调节控制,提高涂布质量。
技术特征:
1.一种涂布模头闭环调节装置,其特征在于,包括:
2.根据权利要求1所述的涂布模头闭环调节装置,其特征在于,所述水平运动模组(2)为直线电机,所述滑移端(21)设有水平垫板(22),所述竖直运动模组(3)固定安装于所述水平垫板(22)上,所述滑移端(21)的滑移方向与所述支架(1)的长度方向一致,所述水平垫板(22)随所述滑移端(21)滑移以带动所述竖直运动模组(3)水平滑移。
3.根据权利要求1所述的涂布模头闭环调节装置,其特征在于,所述水平运动模组(2)为滚珠丝杆直线模组或同步带直线模组。
4.根据权利要求2所述的涂布模头闭环调节装置,其特征在于,所述竖直运动模组(3)还包括垂直固定于所述水平垫板(22)上的背板(33),所述第一驱动机构(31)固定于所述背板(33)顶部,所述竖直垫板(32)滑动安装于所述背板(33)面向所述流量调节机构(6)的一侧,所述驱动机构的输出端与所述竖直垫板(32)传动连接,以驱动所述竖直垫板(32)在所述背板(33)上竖直滑移。
5.根据权利要求4所述的涂布模头闭环调节装置,其特征在于,所述背板(33)面向所述流量调节机构(6)的侧面上设有竖直导轨(34),所述竖直垫板(32)与所述竖直导轨(34)配合连接。
6.根据权利要求4所述的涂布模头闭环调节装置,其特征在于,所述第一驱动机构(31)为气缸。
7.根据权利要求1所述的涂布模头闭环调节装置,其特征在于,所述旋转模组(4)还包括固定安装于所述竖直垫板(32)上的第二驱动机构(42),所述第二驱动机构(42)与所述旋转夹持件(41)传动连接,所述第二驱动机构(42)驱动所述旋转夹持件(41)旋转。
8.根据权利要求7所述的涂布模头闭环调节装置,其特征在于,所述旋转夹持件(41)包括与所述第二驱动机构(42)传动连接的旋转手指气缸(412)和夹爪(411),所述旋转手指气缸(412)驱动所述夹爪(411)进行夹紧或放松。
9.根据权利要求1所述的涂布模头闭环调节装置,其特征在于,所述支架(1)固定安装于所述涂布模头(5)上。
10.根据权利要求1所述的涂布模头闭环调节装置,其特征在于,所述感应元件(7)为激光位移传感器。
技术总结
本技术公开了一种涂布模头闭环调节装置,包括:支架、水平运动模组、竖直运动模组、旋转模组、控制系统和感应元件;当定位好待调节的流量调节机构的位置后,控制系统控制水平运动模组运动到与之相应的位置,当水平运动模组与待调节的流量调节机构的位置相对应时,旋转模组上设置的感应元件测定该流量调节机构至旋转模组之间的距离参数,并将该距离参数反馈至控制系统,进而控制竖直垫板相对于滑移端在竖直方向上做滑移运动,带动旋转模组做升降运动,以使得旋转模组的旋转夹持件与流量调节机构连接,带动流量调节机构定量转动,以达到调节流量的目的;起到精准定位调节的作用,避免调节过量,实现精准调节控制,提高涂布质量。
技术研发人员:乐荣伟,诸葛挺,彭建林
受保护的技术使用者:深圳市曼恩斯特科技股份有限公司
技术研发日:20221221
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!