一种带门端腔体工件涂装防污染装置的制作方法
本新型涉及涂装领域,尤其涉及一种带门端腔体工件涂装防污染装置。
背景技术:
1、目前带门端腔体工件涂装缝隙都是没遮蔽,由于带门端腔体工件内外颜色需求不一致,涂装时涂料外涂料会沿着缝隙进入内部,从而污染内部涂装,内部涂装需要人工修补,造成人工和涂料的浪费。
2、带门端腔体生产自动化是未来的趋势,带门端腔体门端涂装防污染研发处于比较原始的阶段,目前主要是靠人拆装缝隙遮蔽工装来防腔体内部污染,人工拆装门端遮蔽工装,效率低,不安全。
3、因此,急需一种自动化程度高,使用方便的门端腔体工件涂装防污染装置及防污染方法,以解决上述问题。
技术实现思路
1、为缓解或解决上述问题中的至少一个方面或者至少一点,提出本新型。
2、本新型提供一种带门端腔体工件涂装防污染装置,包括:定位架,第一遮蔽条,第一寻位机械手、第二寻位机械手;第一寻位机械手和第二寻位机械手与定位架固定连接;第一寻位机械手包括第一寻位部、第一调节部、第一牵引部,第一寻位部可通过第一调节部在第一预定范围内进行位置调节,第一牵引部可随第一寻位部一起移动;第二寻位机械手包括第二寻位部、第二调节部、第二牵引部,第二寻位部可通过第二调节部在第二预定范围内进行位置调节,第二牵引部可随第二寻位部一起移动;第一牵引部与第二牵引部之间设置有第一遮蔽条,第一遮蔽条用于填充工件的门端与工件主体之间的间隙。
3、本新型通过第一调节部,第二调节部的调节,调节第一寻位部、第二寻位部的位置,进而调节第一牵引部、第二牵引部位置,从而可将位于第一牵引部、第二牵引部之间的第一遮蔽条安装在工件的门端与工件主体之间的间隙中。通过上述设置,可以将门端与工件主体之间的间隙中的至少一条遮蔽,可以有效的防止涂装污染、其自动化程度高、操作方便。
4、为了达到更好的遮蔽效果,本新型还提供如下优选技术方案:
5、优选的,还包括第三寻位机械手、第四寻位机械手;第三寻位机械手包括第三寻位部、第三调节部、第三牵引部,第三寻位部可通过第三调节部在第三预定范围内进行位置调节,第三牵引部可随第三寻位部一起移动;和第四寻位机械手包括第四寻位部、第四调节部、第四牵引部,第四寻位部可通过第四调节部在第四预定范围内进行位置调节,第四牵引部可随第四寻位部一起移动;第二牵引部与第三牵引部之间设有第二遮蔽条,第三牵引部和第四牵引部之间设有第三遮蔽条,第四牵引部和第一牵引部之间设有第四遮蔽条;第二遮蔽条与第四遮蔽条之间还连接有第五遮蔽条。
6、优选的,还包括压紧装置,压紧装置用于将第一遮蔽条、第二遮蔽条、第三遮蔽条、第四遮蔽条、第五遮蔽条中的至少之一压紧至上述间隙中。
7、优选的,第一调节部、第二调节部、第三调节部、第四调节部均为位置补偿件,其可以调节三维空间x,y,z方向的位置。
8、优选的,第一寻位部包括第一导向部,第二寻位部包括第二导向部,第三寻位部包括第三导向部,第四寻位部包括第四导向部;通过第一导向部、第二导向部、第三导向部和第四导向部,可以将第一寻位部、第二寻位部、第三寻位部、第四寻位部分别引导至工件的四个配合部中。
9、优选的,所述第一导向部、第二导向部、第三导向部、第四导向部均包括四个导向片,四个导向片呈十字形排列,每个导向片包括一个导向斜面;所述配合部为凹槽,其内设有与导向斜面配合的弧形引导面。
10、优选的,第一牵引部、第二牵引部、第三牵引部、第四牵引部的一端均固定连接有用于引导第一遮蔽条、第二遮蔽条、第三遮蔽条、第四遮蔽条进入间隙中的导角部,导角部上形成有可与间隙配合的导向角。
11、优选的,所述定位架包括第一支架和第二支架,第一定位机械手和第三定位机械手位于第一支架的两端;第二定位机械手和第四定位机械手位于第二支架的两端;第一支架与第二支架的长度均大致等于工件门端的宽度,第一支架与第二支架之间的纵向距离大致等于工件门端的高度。
12、优选的,第一调节部、第二调节部、第三调节部、第四调节部均包括弹性组件,通过弹性组件用于调节对应的第一寻位部、第二寻位部、第三寻位部、第四寻位部的位置。
13、优选的,所述工件是集装箱。
14、另外本新型还提供一种带门端腔体工件涂装防污染方法,包括如下步骤:采用前述的防污染装置,遮蔽工件的门端与工件主体之间的间隙;对工件的门端进行涂装作业。
15、优选的,集装箱沿箱长方向慢慢靠近带门端腔体防污染遮蔽装置,当寻位机械手与集装箱门端角件端口接触时,寻位机械手的导向斜面会根据箱位置偏差自动进行xy方向的调整,当集装箱停到位后,寻位机械手会根据箱位置沿z轴方向浮动最终定位。
16、优选的,寻位机械手与集装箱门端角件最终定位同时,导角部的引导角会自动沿着门边和门框边导入门缝,从而保证门缝定位机构可靠进入门缝。
17、本新型通过寻位机械手的设置,可以快速的将门端与工件主体之间的间隙遮蔽,可以有效的防止涂装污染、其自动化程度高、操作方便。并进一步的通过压紧装置,可以使其遮蔽严密;本新型进一步通过导向斜面的设置可以准备的引导寻位部到合适的位置,其寻位效率高。本新型进一步的调节部通过弹性组件的设置可以方便的进行三个方向的位置调节,其结构简单、调节方便。进一步的通过导角部的设置,可以准确的将遮蔽条安装到间隙中。
18、本新型进一步的通过第三、第四寻位机械手与第一、第二寻位机械手的配合,可以同时实现上下左右四个方向的密封,并进一步通过设置第五遮蔽条,可以同时实现中间处的间隙密封。本新型尤其适用于集装箱的遮蔽,通过上述方式,可以实现一次性遮蔽完成,操作简单,提高效率。
技术特征:
1.一种带门端(28)腔体工件涂装防污染装置,其特征在于:包括:
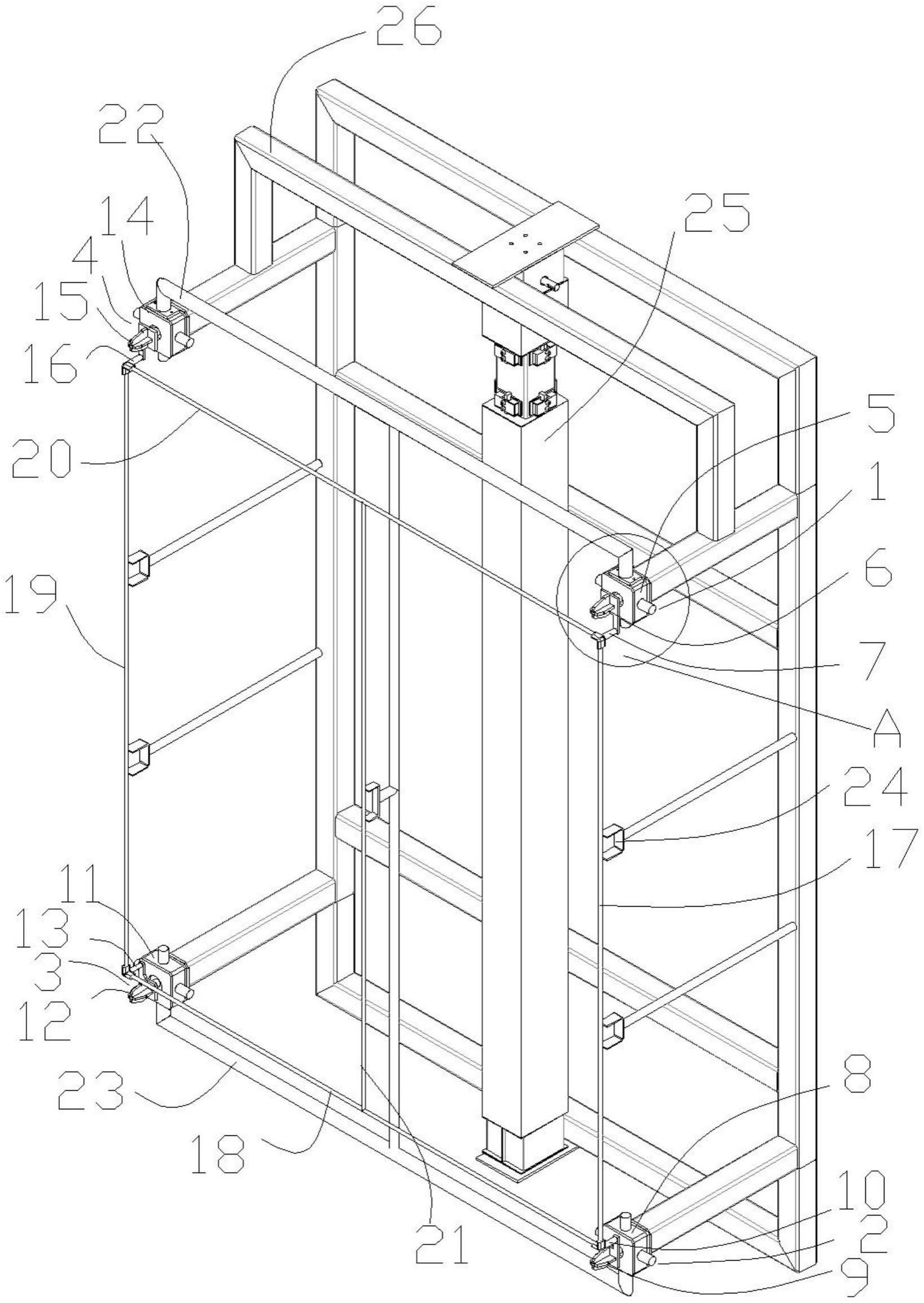
2.根据权利要求1所述的防污染装置,其特征在于:还包括第三寻位机械手(3)、第四寻位机械手(4);第三寻位机械手(3)包括第三寻位部(12)、第三调节部(11)、第三牵引部(13),第三寻位部(12)可通过第三调节部(11)在第三预定范围内进行位置调节,第三牵引部(13)可随第三寻位部(12)一起移动;和第四寻位机械手(4)包括第四寻位部(15)、第四调节部(14)、第四牵引部(16),第四寻位部(15)可通过第四调节部(14)在第四预定范围内进行位置调节,第四牵引部(16)可随第四寻位部(15)一起移动;第二牵引部(10)与第三牵引部(13)之间设有第二遮蔽条(18),第三牵引部(13)和第四牵引部(16)之间设有第三遮蔽条(19),第四牵引部(16)和第一牵引部(7)之间设有第四遮蔽条(20);第二遮蔽条(18)与第四遮蔽条(20)之间还连接有第五遮蔽条(21)。
3.根据权利要求2所述的防污染装置,其特征在于:还包括压紧装置(24),压紧装置(24)用于将第一遮蔽条(17)、第二遮蔽条(18)、第三遮蔽条(19)、第四遮蔽条(20)、第五遮蔽条(21)中的至少之一压紧至上述间隙(29)中。
4.根据权利要求2所述的防污染装置,其特征在于:第一调节部(5)、第二调节部(8)、第三调节部(11)、第四调节部(14)均为位置补偿件,其可以调节三维空间x,y,z方向的位置。
5.根据权利要求2所述的防污染装置,其特征在于:第一寻位部(6)包括第一导向部,第二寻位部(9)包括第二导向部,第三寻位部(12)包括第三导向部,第四寻位部(15)包括第四导向部;通过第一导向部、第二导向部、第三导向部和第四导向部,可以将第一寻位部(6)、第二寻位部(9)、第三寻位部(12)、第四寻位部(15)分别引导至工件的四个配合部(30)中。
6.根据权利要求5所述的防污染装置,其特征在于:所述第一导向部、第二导向部、第三导向部、第四导向部均包括四个导向片,四个导向片呈十字形排列,每个导向片包括一个导向斜面(32);所述配合部(30)为凹槽,其内设有与导向斜面(32)配合的弧形引导面。
7.根据权利要求2所述的防污染装置,其特征在于:第一牵引部(7)、第二牵引部(10)、第三牵引部(13)、第四牵引部(16)的一端均固定连接有用于引导第一遮蔽条(17)、第二遮蔽条(18)、第三遮蔽条(19)、第四遮蔽条(20)进入间隙(29)中的导角部(34),导角部(34)上形成有可与间隙(29)配合的引导角。
8.根据权利要求2所述的防污染装置,其特征在于:所述定位架(26)包括第一支架(22)和第二支架(23),第一定位机械手和第三定位机械手位于第一支架(22)的两端;第二定位机械手和第四定位机械手位于第二支架(23)的两端;第一支架(22)与第二支架(23)的长度均大致等于工件门端(28)的宽度,第一支架(22)与第二支架(23)之间的纵向距离大致等于工件门端(28)的高度。
9.根据权利要求2所述的防污染装置,其特征在于:第一调节部(5)、第二调节部(8)、第三调节部(11)、第四调节部(14)均包括弹性组件,通过弹性组件用于调节对应的第一寻位部(6)、第二寻位部(9)、第三寻位部(12)、第四寻位部(15)的位置。
10.根据权利要求1-9中任一项所述的防污染装置,其特征在于:所述工件是集装箱。
技术总结
本新型涉及一种带门端腔体工件涂装防污染装置,包括:定位架,第一遮蔽条,第一寻位机械手、第二寻位机械手;第一寻位机械手和第二寻位机械手与定位架固定连接;第一牵引部与第二牵引部之间设置有第一遮蔽条,第一遮蔽条用于填充工件的门端与工件主体之间的间隙。本新型通过寻位机械手的设置,可以快速的将门端与工件主体之间的间隙遮蔽,可以有效的防止涂装污染、其自动化程度高、操作方便。
技术研发人员:刘少均,吴文辉,朱加存,杨忠伟,谭柱江
受保护的技术使用者:深圳火葫芦智能技术有限公司
技术研发日:20221227
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!