一种输电线路地线喷涂养护机器人的喷涂装置及方法与流程
本发明属于电力线路故障检修,尤其涉及输电线路地线养护技术。
背景技术:
1、输电线路长期处于风吹日晒的工况下,地线运行15年以上即处于高危状态,须进行更换,但其处于复杂的地理环境以及工作环境下,更换难度非常大,进而提出地线的养护措施。如果采用人工涂护,存在危险性大、操作难度大、喷涂均匀性差等问题。所以采用机器喷涂是大势所趋。
2、相关研究表明,在输电线表面涂覆超疏水材料可以减少极端天气输电线的覆冰情况,因此对输电线防覆冰涂护的需求日益扩大。无论是地线的防腐涂护还是输电线的防覆冰涂护,都要求电力行业具备机器人带电工作的能力。
3、输电线引起的电网运行问题,会对社会造成重大经济损失以及严重影响用电居民的生活,所以地线养护以及输电线防覆冰涂护这个问题亟需解决。解决复杂环境下地线养护问题可以延长地线使用寿命,可以降低覆冰对输电线造成的危害,节省电网运行成本,并且保障电网平稳运行。
技术实现思路
1、针对现有技术的缺陷,本发明所要解决的技术问题就是提供一种输电线路地线喷涂养护机器人的喷涂装置及方法,解决现有技术中输电线路的自动喷涂机器人喷涂质量不够高的问题。
2、为解决上述技术问题,本发明采用如下技术方案:
3、一方面,提供了一种输电线路地线喷涂养护机器人的喷涂装置,包括:储料罐,所述储料罐用于储存喷涂用涂料;
4、挤压机构,所述挤压机构设有挤压部件,通过挤压部件挤压储料罐内涂料,将储料罐中的涂料推至出料口;
5、涂料输送机构,所述涂料输送机构包括出料口、输料软管和喷头,所述出料口与储料罐连接,所述出料口、输料软管和喷头依次相接,喷头向输电线路地线喷涂涂料;
6、液位监测机构,用于监测储料罐内涂料的液位,并且在涂料液位到达低液位时,发出警告并使喷涂装置停止喷涂。
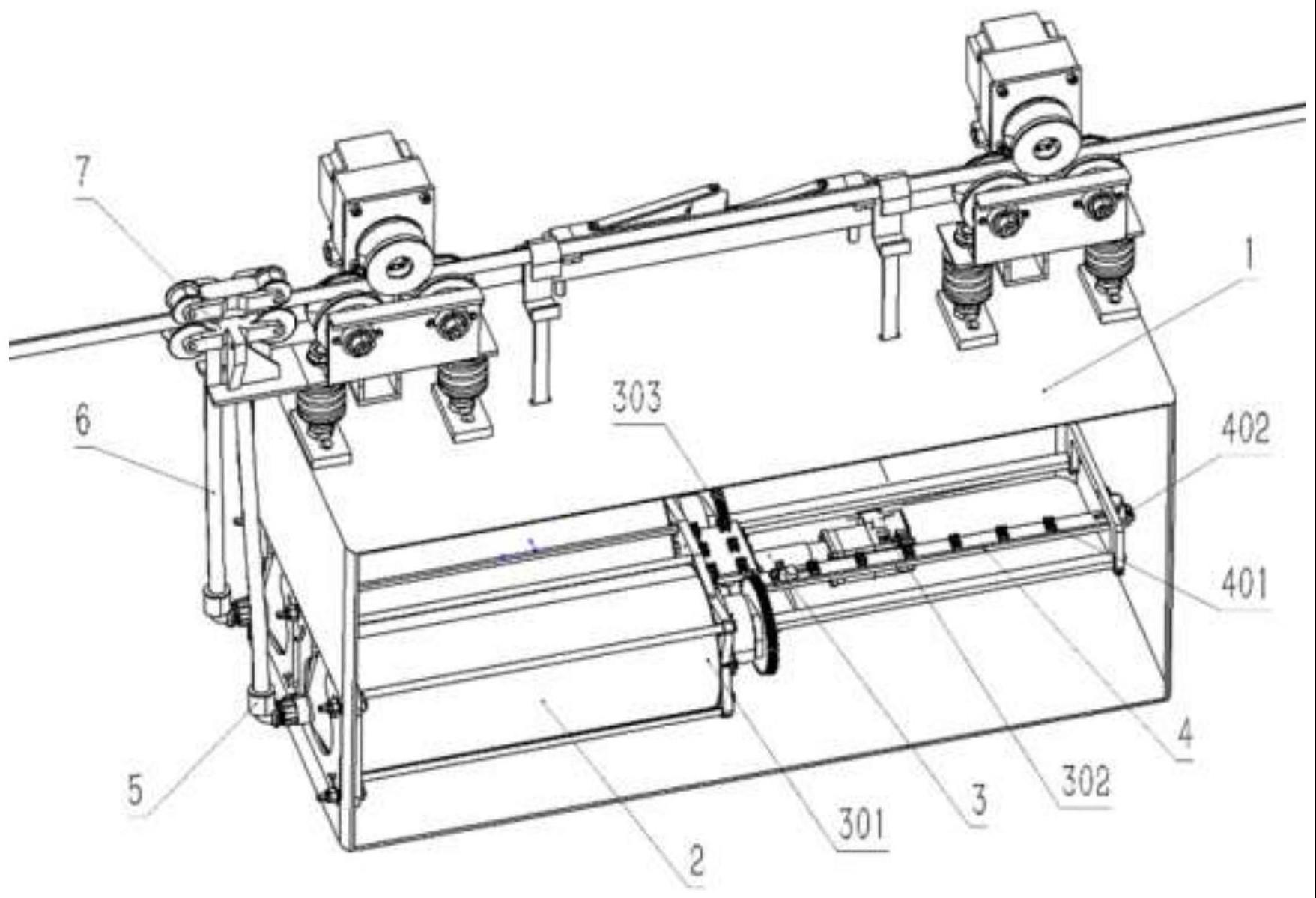
7、优选的,所述挤压部件为活塞,所述挤压机构包括驱动电机、传动机构和活塞,所述驱动电机的输出轴与传动机构连接,所述活塞与储料罐活动连接,通过传动机构将驱动电机的旋转运动转换成活塞的直线运动,通过活塞前进的动作实现储料罐内涂料的挤压、将储料罐中的涂料推至出料口。
8、优选的,所述传动机构设有直线运动部件,所述直线运动部件与活塞连接。
9、优选的,所述传动机构包括齿轮和与齿轮连接的螺旋丝杆,所述齿轮由驱动电机驱动旋转,所述齿轮带动螺旋丝杆转动,所述直线运动部件为螺旋丝杠上连接的驱动螺母。
10、优选的,所述液位监测机构包括遮光板和多个光电感应开关,所述遮光板与活塞连接,多个光电感应开关沿活塞移动方向间隔设置,用于感应遮光板的移动位置以实时监测涂料液位。
11、优选的,所述驱动电机的转速与喷涂机器人沿输电线路地线的行进速度成正比。
12、另外一方面,提供了一种输电线路地线喷涂养护机器人的喷涂方法,采用所述的一种输电线路地线喷涂养护机器人的喷涂装置进行喷涂工作,包括以下步骤:
13、步骤一:喷涂机器人进入输电线路,喷涂装置根据前进速度设定喷涂速度,等待喷涂指令;
14、步骤二:收到喷涂指令,驱动电机通过传动机构推动活塞,并带动遮光板前进,通过光电开关感应涂料液位;
15、步骤三:挤压机构开始工作,活塞匀速推动涂料,涂料经过出料口和输料软管输送至喷头,喷头按照设定的喷涂速度均匀地将涂料喷涂到输电线路地线表面;
16、步骤四:当储料罐内涂料液位到达低液位时,液位监测机构发出警告并且使喷涂装置停止工作。
17、本发明采用的技术方案,进行喷涂工作时,驱动电机开始运转,传动机构将电机旋转的转矩转换为活塞的前进推力,活塞将涂料推至出料口,涂料通过输料软管到达喷头,由多个喷头进行360°无死角喷涂,均匀地喷涂至地线上,喷涂过程中,由驱动电机控制出料速度,使其与喷涂机器人沿输电线路地线的行进速度对应。
18、因此,具有如下有益效果:
19、(1)喷涂装置喷涂速度(量)与机器人行进速度配合(成正比),确保喷涂的均匀性,喷涂时360°无死角喷涂,保证涂料均匀全面的喷涂在地线上,能增加输电线寿命,减少更换成本,防止输电线结冰,减少除冰作业。
20、(2)喷涂全面均匀,有利于涂料良好地附着在输电线上,避免了滴落到地面给环境和行人造成伤害的可能性。
21、(3)液位监测机构可以实时监测涂料液位,当涂料液位到达低液位时发出警告并使喷涂装置停止喷涂,有利于及时补充涂料,减少不必要的电力损耗,避免出现少涂、漏涂的情况,提升喷涂的质量。
22、本发明的具体技术方案及其带来的有益效果将会在下面的具体实施方式中结合附图中予以详细的揭露。
技术特征:
1.一种输电线路地线喷涂养护机器人的喷涂装置,其特征在于,包括:
2.根据权利要求1所述的一种输电线路地线喷涂养护机器人的喷涂装置,其特征在于,所述挤压部件为活塞,所述挤压机构包括驱动电机、传动机构和活塞,所述驱动电机的输出轴与传动机构连接,所述活塞与储料罐活动连接,通过传动机构将驱动电机的旋转运动转换成活塞的直线运动,通过活塞前进的动作实现储料罐内涂料的挤压、将储料罐中的涂料推至出料口。
3.根据权利要求2所述的一种输电线路地线喷涂养护机器人的喷涂装置,其特征在于,所述传动机构设有直线运动部件,所述直线运动部件与活塞连接。
4.根据权利要求3所述的一种输电线路地线喷涂养护机器人的喷涂装置,其特征在于,所述传动机构包括齿轮和与齿轮连接的螺旋丝杆,所述齿轮由驱动电机驱动旋转,所述齿轮带动螺旋丝杆转动,所述直线运动部件为螺旋丝杠上连接的驱动螺母。
5.根据权利要求2所述的一种输电线路地线喷涂养护机器人的喷涂装置,其特征在于,所述液位监测机构包括遮光板和多个光电感应开关,所述遮光板与活塞连接,多个光电感应开关沿活塞移动方向间隔设置,用于感应遮光板的移动位置以实时监测涂料液位。
6.根据权利要求2所述的一种输电线路地线喷涂养护机器人的喷涂装置,其特征在于,所述驱动电机的转速与喷涂机器人沿输电线路地线的行进速度成正比。
7.一种输电线路地线喷涂养护机器人的喷涂方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种输电线路地线喷涂养护机器人的喷涂装置及方法,其中喷涂装置包括储料罐、涂料输送机构、挤压机构、液位检测机构,涂料输送机构包括出料口、输料软管和喷头,出料口位于储料罐一侧,出料口通过输料软管连接喷头,挤压机构包括驱动电机,传动机构和活塞,驱动电机通过传动机构为活塞提供推力,液位监测机构用于感应储料罐内涂料余量。驱动电机通过传动机构将电机的力矩传给活塞,推动活塞挤压储料罐内的涂料,将涂料推送至出料口,再经由输料软管到达喷头,实现对地线的均匀喷涂,通过均匀喷涂特殊材料于地线上可减少线路覆冰,延长地线使用寿命。
技术研发人员:倪宏宇,黄武浩,颜文旭,邓益民,汪磊,李勇,储杰,金立东,石浩,劳铭杰,施加凯,王鹏,吴海静,金宇辰,朱吉刚,余海冬,沈雨竹
受保护的技术使用者:国网浙江省电力有限公司绍兴供电公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!