一种智能喷涂送粉装置的制作方法
本发明属于喷涂,更具体地说,涉及一种智能喷涂送粉装置。
背景技术:
1、随着现代工业的发展,喷涂技术也发展迅速,静电喷涂被越来越多人提及,它能满足我们对涂装外观、操作简易度和经济成本上的要求。静电喷涂是指利用电晕放电原理使雾化涂料在高压直流电场作用下荷负电,并吸附于荷正电基底表面放电的涂装方法。
2、但是,目前的喷涂作业过程中,还是无法避免静电痕的产生,喷涂物件的表面吸附有带电的颗粒会导致的静电痕的产生,现有技术中,虽然设置有离子风室对喷涂物件进行吹洗,但是均是大面积的风,若是喷涂物件带有曲面或者弯折等,离子风并不能很好地对喷涂物件的表面进行吹洗作业。
3、另,涂料的电阻值的大小也影响着喷涂过程的上漆率,也是静电痕产生的诱因之一。
4、由于静电喷涂是一次成型,静电痕后续的修复不仅耗时耗力,而且还不一定能够修复得和一次成型一样的完美,直接影响了整个作业的进度以及喷涂的品质。
技术实现思路
1、本发明要解决的技术问题在于提供一种智能喷涂送粉装置,它可以实现智能控制喷涂过程,避免静电痕的产生。
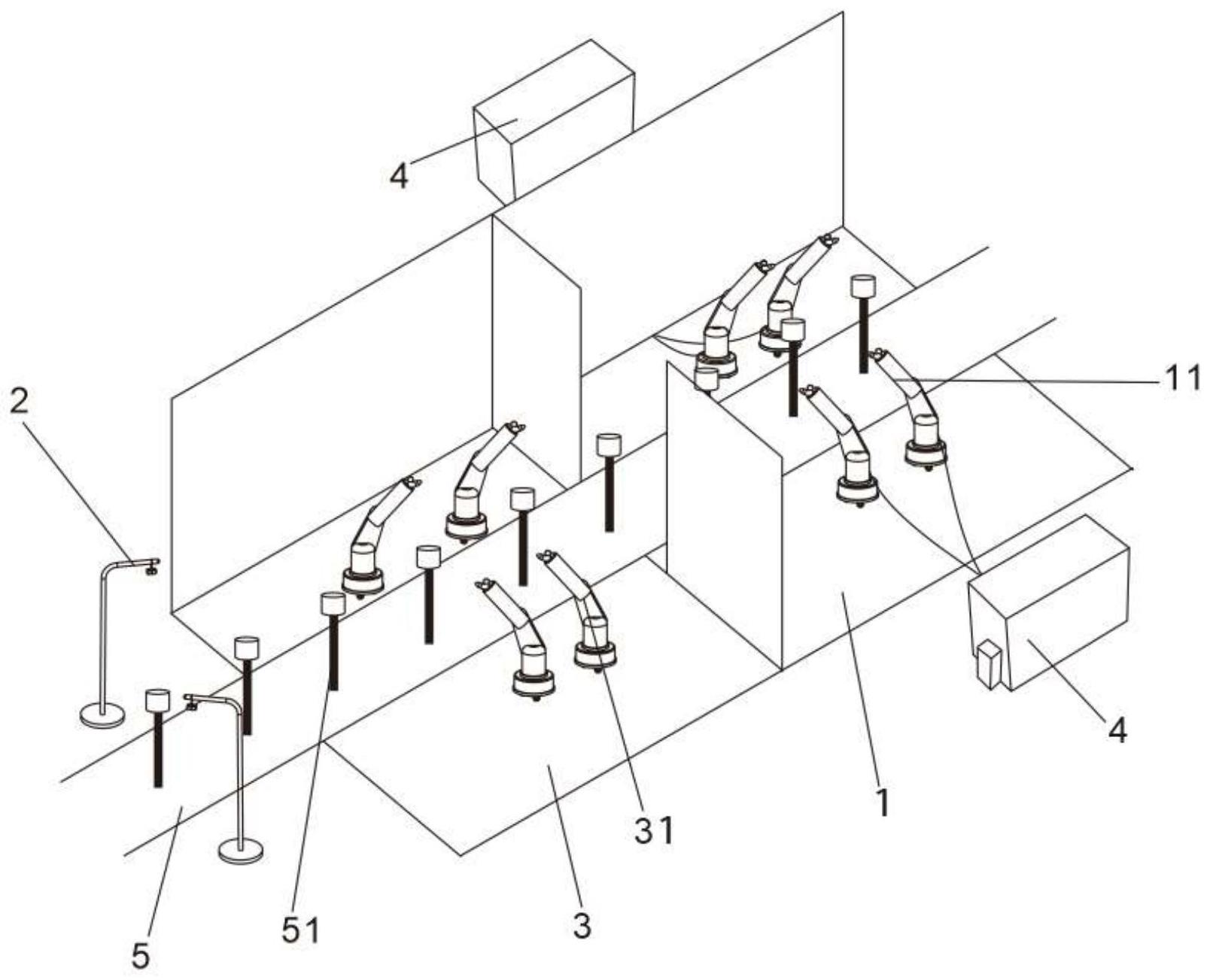
2、本发明的一种智能喷涂送粉装置,包括控制中心、扫描装置、离子风室、喷涂室和喷涂箱,控制中心分别与扫描装置、离子风室和喷涂箱电连接控制。
3、控制中心控制扫描装置对喷涂物件进行拍摄,得到三维数据;控制中心设置有三维数据处理程序,所述三维数据处理程序根据三维数据分别生成对应的离子风机路径和喷涂路径。
4、离子风室内设置有离子风机器人,控制中心驱动离子风机器人根据离子风路径运动;离子风机器人的出风口的风道内部设置有第一压力传感器;所述第一压力传感器对离子风机器人工作时喷射出的离子风的风压进行监控测试;离子风机器人的出风口的下端部设置有红外线感应器;红外线感应器监测离子风机器人出风口与喷涂物件表面之间的距离。
5、离子风室顶部依序活动设置有风压测试装置和静电测试装置,控制中心驱动风压测试装置对离子风机器人作用到喷涂物件表面的风压进行测试;静电测试装置受控制中心驱动,对消除静电后的喷涂物件进行静电测试。
6、喷涂箱内设置有电阻测试装置,电阻测试装置对喷涂箱内的涂料进行电阻值测试,并将电阻值反馈给控制中心,控制中心根据电阻值驱动喷涂箱内的涂料的输送。
7、喷涂室内设置有喷涂机器人,控制中心驱动喷涂机器人按照喷涂路径运动。
8、作为本发明的进一步改进,所述第一压力传感器与所述控制中心电连接控制;所述控制中心驱动第一压力传感器运行;红外感应器与控制中心电连接控制;所述控制中心驱动红外线感应器运行。
9、作为本发明的进一步改进,所述离子风室的顶部还设置有导轨;所述风压测试装置包括第一底座、旋转台、第一探头和机械臂;所述第一底座的上端部滑动安装于所述导轨中,所述风压测试装置可在所述导轨上进行往复运动;所述第一底座内安装有第二压力传感器;所述第一底座的下端部与所述旋转台的上端部滑动安装,旋转台的下端部与机械臂的上端部固定安装;所述机械臂由数节连接的支臂组成,每一节支臂能自由地旋转或移动;所述机械臂的下端部固定安装有第一探头,所述第一探头和所述第二压力传感器电连接控制。
10、作为本发明的进一步改进,所述静电测试装置包括第二底座、伸缩杆和第二探头;所述第二底座上端部滑动安装于所述导轨中,所述静电测试装置可在所述导轨上进行往复运动;所述第二底座内部设置有电压测试仪和电机,所述电压测试仪与第二探头电连接控制;所述电机的输出端贯穿所述第二底座下端部与伸缩杆上端部安装连接;所述伸缩杆的下端部与第二探头固定安装;所述伸缩杆在竖直方向上进行伸缩运动。
11、作为本发明的进一步改进,扫描装置设置有若干摄像机;所述摄像机为深度摄像机;所述摄像机对喷涂物件进行拍摄,输出深度图;所述三维数据处理程序根据深度图输出三维点云数据,并对其进行去噪、配准、精简及分割;并通过所述三维数据处理程序根据处理后的点云数据建模,得到喷涂物件的三维模型数据。
12、作为本发明的进一步改进,三维数据处理程序根据所述三维模型数据生成初始的离子风机路径和喷涂路径,再根据所述初始的离子风机路径和喷涂路径进行虚拟示教,最后根据所述虚拟示教的反馈结果对所述的离子风机路径和喷涂路径进行优化,得到优化后的离子风机路径和喷涂路径。
13、作为本发明的进一步改进,电阻值控制范围为500-1000kω。
14、作为本发明的进一步改进,离子风机器人产生的离子风的风压不小于0.2mpa;离子风机器人的出风口距离喷涂物件的表面的距离范围为295-305mm。
15、作为本发明的进一步改进,所述的智能喷涂送粉装置的喷涂方法,包括以下步骤:
16、s1、扫描装置对喷涂物件进行拍摄,输出图片,反馈给控制中心;
17、s2、控制中心根据图片,得到三维模型数据,并分别输出对应的离子风机路径和喷涂路径;
18、s3、控制中心驱动离子风机器人根据离子风路径运行;将喷涂物件表面吸附的静电颗粒吹净;
19、s4、静电测试装置对消除静电后的喷涂物件进行静电测试;
20、s5、电阻测试装置对喷涂箱内的涂料进行电阻值测试,并将电阻值反馈给控制中心;控制中心判定电阻值合格,则进行下一步作业;若控制中心判定电阻值不合格,则对涂料进行调整,直至电阻值测试合格后,再进行下一步作业;
21、s6、控制中心驱动喷涂机器人按照喷涂路径运动,对喷涂物件进行喷涂作业。
22、作为本发明的进一步改进,步骤s3还包括:
23、s31、离子风机器人通过第一压力传感器监测离子风机器人出风口和喷涂物件表面的距离;
24、s32、离子风机器人通过红外线感应器监测其出风口的风压;
25、s33、风压测试装置对喷涂物件表面受到的离子风的风压进行测试,并将测试数据反馈给控制中心。
26、相比于现有技术,本发明的有益效果在于:本发明的方案设置有离子风室,离子风室内设置有离子风机器人,通过三维扫描智能控制生成离子风路径,离子风机器人根据离子风路径对喷涂物件进行除静电工作;并且喷涂箱内还设置有电阻测试装置,通过控制中心对涂料的电阻值进行监测;如此设置,使得喷涂物件上的静电消除得更干净,避免因为静电的原因导致静电痕的出现,同时也避免因为涂料的电阻的原因使得喷涂过程中产生静电痕。
技术特征:
1.一种智能喷涂送粉装置,其特征在于:包括控制中心、扫描装置(2)、离子风室(3)、喷涂室(1)和喷涂箱(4),控制中心分别与扫描装置(2)、离子风室(3)和喷涂箱(4)电连接控制;
2.根据权利要求1所述的一种智能喷涂送粉装置,其特征在于:所述第一压力传感器与所述控制中心电连接控制;所述控制中心驱动第一压力传感器运行;红外感应器与控制中心电连接控制;所述控制中心驱动红外线感应器运行。
3.根据权利要求1所述的一种智能喷涂送粉装置,其特征在于:所述离子风室(3)的顶部还设置有导轨;所述风压测试装置(32)包括第一底座(321)、旋转台(322)、第一探头(323)和机械臂(324);所述第一底座(321)的上端部滑动安装于所述导轨中,所述风压测试装置(32)可在所述导轨上进行往复运动;所述第一底座(321)内安装有第二压力传感器;所述第一底座(321)的下端部与所述旋转台(322)的上端部滑动安装,旋转台(322)的下端部与机械臂(324)的上端部固定安装;所述机械臂(324)由数节连接的支臂组成,每一节支臂能自由地旋转或移动;所述机械臂(324)的下端部固定安装有第一探头(323),所述第一探头(323)和所述第二压力传感器电连接控制。
4.根据权利要求3所述的一种智能喷涂送粉装置,其特征在于:所述静电测试装置(33)包括第二底座(331)、伸缩杆(332)和第二探头(333);所述第二底座(331)上端部滑动安装于所述导轨中,所述静电测试装置(33)可在所述导轨上进行往复运动;所述第二底座(331)内部设置有电压测试仪和电机,所述电压测试仪与第二探头(333)电连接控制;所述电机的输出端贯穿所述第二底座(331)下端部与伸缩杆(332)上端部安装连接;所述伸缩杆(332)的下端部与第二探头(333)固定安装;所述伸缩杆(332)在竖直方向上进行伸缩运动。
5.根据权利要求1所述的一种智能喷涂送粉装置,其特征在于:扫描装置(2)设置有若干摄像机;所述摄像机为深度摄像机;所述摄像机对喷涂物件进行拍摄,输出深度图;所述三维数据处理程序根据深度图输出三维点云数据,并对其进行去噪、配准、精简及分割;并通过所述三维数据处理程序根据处理后的点云数据建模,得到喷涂物件的三维模型数据。
6.根据权利要求5所述的一种智能喷涂送粉装置,其特征在于:三维数据处理程序根据所述三维模型数据生成初始的离子风机路径和喷涂路径,再根据所述初始的离子风机路径和喷涂路径进行虚拟示教,最后根据所述虚拟示教的反馈结果对所述的离子风机路径和喷涂路径进行优化,得到优化后的离子风机路径和喷涂路径。
7.根据权利要求1所述的一种智能喷涂送粉装置,其特征在于:电阻值控制范围为500-1000kω。
8.根据权利要求1所述的一种智能喷涂送粉装置,其特征在于:离子风机器人产生的离子风的风压不小于0.2mpa;离子风机器人的出风口距离喷涂物件的表面的距离范围为295-305mm。
9.根据权利要求1所述的一种智能喷涂送粉装置,其特征在于:所述的智能喷涂送粉装置的喷涂方法,包括以下步骤:
10.根据权利要求9所述的一种智能喷涂送粉装置,其特征在于:步骤s3还包括:
技术总结
本发明公开了一种智能喷涂送粉装置,属于喷涂技术领域。一种智能喷涂送粉装置,包括控制中心、扫描装置、离子风室、喷涂室和喷涂箱,控制中心分别与扫描装置、离子风室和喷涂箱电连接控制;控制中心控制扫描装置对喷涂物件进行拍摄,得到三维数据;根据三维数据分别生成对应的离子风机路径和喷涂路径;离子风室内设置有离子风机器人,控制中心驱动离子风机器人根据离子风路径运动;喷涂箱内设置有电阻测试装置,电阻测试装置对喷涂箱内的涂料进行电阻值测试,并将电阻值反馈给控制中心,控制中心根据电阻值驱动喷涂箱内的涂料的输送;喷涂室内设置有喷涂机器人,控制中心驱动喷涂机器人按照喷涂路径运动,如此设置,能有效地防止静电痕的产生。
技术研发人员:陈蕾,陈华华,杜伟标
受保护的技术使用者:绍兴鼎华金属制品有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!