一种高精度的涂胶工业机器人的制作方法
本发明涉及涂胶工业机器人领域,具体为一种高精度的涂胶工业机器人。
背景技术:
1、涂胶工业机器人采用数控技术控制的工业五轴机械臂,利用机械臂末端的涂胶头进行涂胶,广泛应用于led灯具、显示屏、电子电器产品、水晶工艺品的灌胶等产品的生产加工过程中。
2、现有的高精度的涂胶工业机器人在进行涂胶工作时,胶水从涂胶管中流动至五轴机械臂末端的涂胶头内,利用直管式的涂胶头涂挤出条状的胶水,通过控制涂胶头与所需涂胶面的距离,伴随五轴机械臂的移动,使柱状的胶水粘附在工件的所需涂覆面上。
3、针对上述现有技术,现有的高精度涂胶工业机器人末端的涂胶头大多为固定式的管状结构,胶水通过管式结构的涂胶管后直接粘附在所需涂覆面上,在对一些复杂曲面的零件进行涂胶时,例如对内凹的弧面、倾角超过九十度的斜面等涂覆面进行涂胶时,由于涂胶头并不能够灵活的转动调节角度,因此五轴机械臂需要转动较大的角度,才能够适使涂胶头应复杂的涂覆面,并且也存在部分复杂表面涂胶头无法进行涂胶的情况,在进行连续的小幅度的蛇形涂胶工作时,五轴机械臂需要频繁的轻微摆动以实现涂胶头所涂出的胶水呈蛇形,而五轴机械臂频繁的小范围摆动容易产生一定的误差,并且可能会使涂胶头所涂出的胶水偏移预定路线。
4、因此,现有的高精度的涂胶工业机器人存在涂胶头不够灵活的问题。
技术实现思路
1、基于此,本发明的目的是提供一种高精度的涂胶工业机器人,以解决现有的高精度的涂胶工业机器人存在涂胶头不够灵活的技术问题。
2、为实现上述目的,本发明提供如下技术方案:一种高精度的涂胶工业机器人,包括机械臂,所述机械臂的末端连接有安装柱,所述安装柱的底端通过波纹管连接有涂胶头,所述安装柱的侧面皆设置有相互平行的滑轨与齿条,所述滑轨上滑动连接有滑块,所述滑块上固定连接有电机,所述电机的输出端通过连接结构固定连接有与齿条啮合的齿轮,所述齿轮的中心远离电机的一端固定连接有齿轮轴,所述齿轮轴通过阻尼结构转动连接有第一连杆,所述第一连杆转动连接有第二连杆,所述第二连杆转动连接在涂胶头侧面的连接结构上。
3、通过采用上述技术方案,在机械臂的末端设置安装柱,利用波纹管连接安装柱与涂胶头,并且在安装柱的四周设置电动的连杆结构,用电动电杆结构控制涂胶头的朝向,同时利用驱动电动连杆结构的电机驱使涂胶头远离或是靠近安装柱,以求达到更广泛的涂胶头调节角度,进而使高精度的涂胶工业机器人的涂胶头更为灵活,以便适应复杂的涂覆面。
4、本发明进一步设置为,所述安装柱与涂胶头皆有四个侧面,且相邻侧面相互正交。
5、通过采用上述技术方案,使安装柱与涂胶头的侧面一一对应,并且相互对应的侧面上的连杆结构能够较为精准的控制涂胶头的朝向角度。
6、本发明进一步设置为,所述涂胶头的中心竖向贯通并设置有涂胶软管,所述涂胶头内在涂胶软管的两侧滑动设置有第二斜块,所述第二斜块的斜面贴合有第一斜块,所述涂胶头内设置有限制第一斜块横向滑动以及第二斜块竖向滑动的限位结构。
7、通过采用上述技术方案,利用相向移动的两个第二斜块挤压涂胶软管,进而便捷的调节涂胶头的出胶量。
8、本发明进一步设置为,所述涂胶头相对的两端固定设置有固定杆,而相对的两侧皆设置有活动杆开口,所述涂胶头内上下滑动设置有移块,所述移块的一端朝向活动杆开口方向固定连接有伸出涂胶头的活动杆,所述移块的另一端固定连接第一斜块。
9、通过采用上述技术方案,利用上下滑动的移块使得第一斜块上下移动,进而利用第一斜块与第二斜块之间的相对滑动驱使第二斜块相向平移。
10、本发明进一步设置为,所述第二斜块与涂胶头的内壁之间设置有复位弹簧,所述复位弹簧用于使第二斜块远离涂胶软管方向滑动。
11、通过采用上述技术方案,利用复位弹簧的弹力以及涂胶软管的弹力使第二斜块滑动复位。
12、本发明进一步设置为,所述涂胶头在移块的滑动轨道与移块之间设置也有阻尼结构,并且所述涂胶头与移块之间的阻尼力度大于齿轮轴处的阻尼力度。
13、通过采用上述技术方案,使得连杆结构在调整涂胶头角度的时候,移块发生滑动。
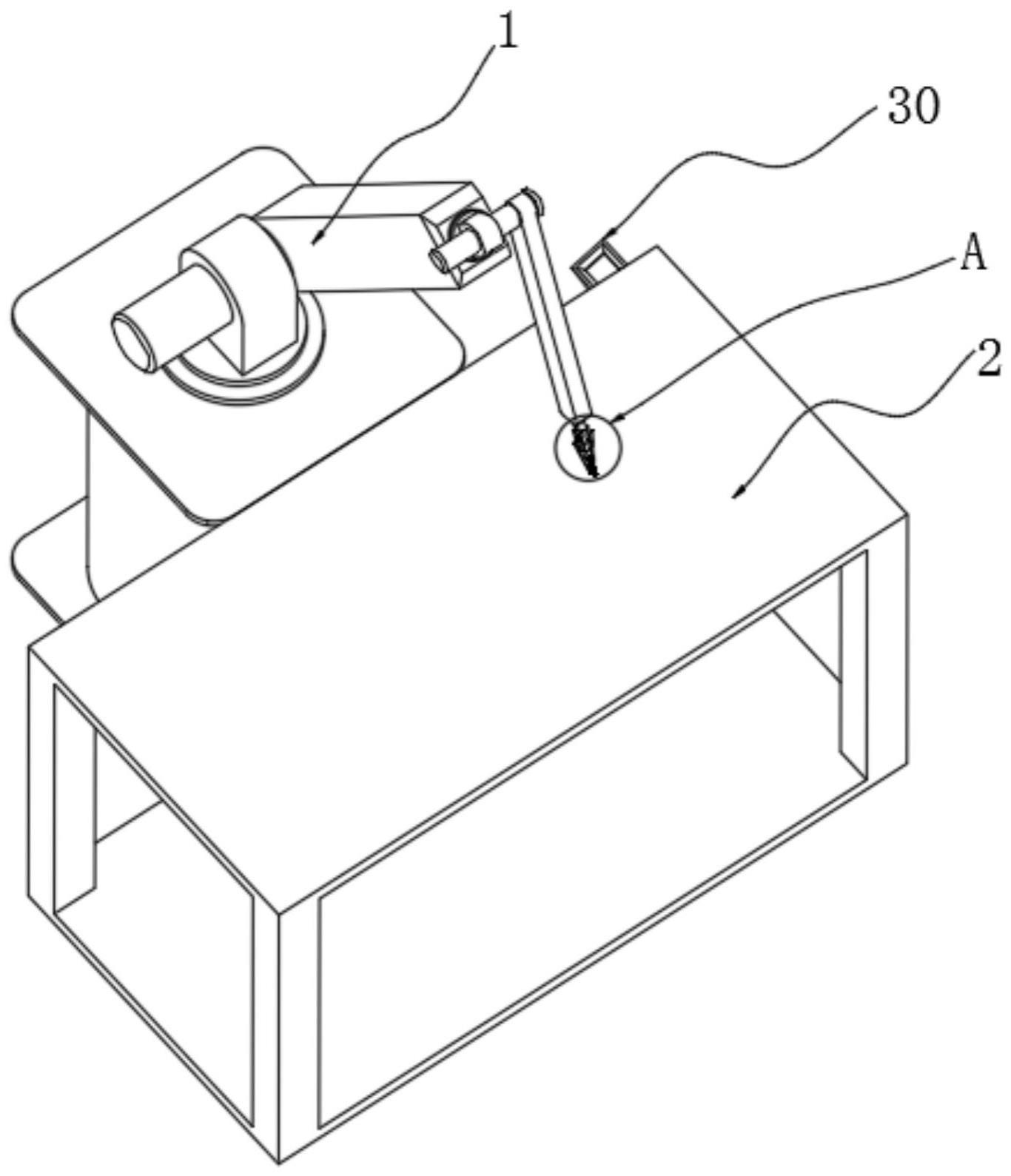
14、本发明进一步设置为,所述机械臂的一侧设置有工作台,所述工作台的一侧固定设置有保温盒,所述保温盒内设置有电热丝。
15、通过采用上述技术方案,利用保温盒在涂胶头不使用的时候对涂胶头保温,保持涂胶头内胶水的流动性。
16、本发明进一步设置为,所述保温盒顶端的开口处向内倾斜设置有斜挡板,所述电热丝设置在斜挡板的背面,所述保温盒的内壁设置有反光板,并且底端设置有漏胶口。
17、通过采用上述技术方案,有效避免胶水滴落在电热丝上影响电热丝工作。
18、综上所述,本发明主要具有以下有益效果:
19、1、本发明通过在机械臂的末端设置安装柱,利用波纹管连接安装柱与涂胶头,并且在安装柱的四周设置电动的连杆结构,用电动电杆结构控制涂胶头的朝向,同时利用驱动电动连杆结构的电机驱使涂胶头远离或是靠近安装柱,以求达到更广泛的涂胶头调节角度,进而使高精度的涂胶工业机器人的涂胶头更为灵活,以便适应复杂的涂覆面;
20、2、本发明通过电动连杆结构驱动涂胶头摆动,使涂胶头能够在小幅度内快速摆动,以使高精度的涂胶工业机器人在进行类似长距离的蛇形涂胶工作时能够尽可能的减小误差,进而使涂胶头保持在正确的运动轨迹上;
21、3、本发明通过控制斜块的上下滑动挤压涂胶头内的涂胶软管,进而便捷的实现对涂胶量的快速控制,并且涂胶量的电气控制组件距离涂胶头较远,在更换工作台上零件时,可以将注胶头伸入到保温组件内,不用担心保温组件影响涂胶头内的电气控制组件,有效避免涂胶头内的胶水降温后出现堵塞的情况;
22、4、本发明通过在工作台的一侧设置保温盒,在保温盒的开口处设置多组向内倾斜的挡板,在挡板的背面设置点热丝,利用保温盒内的反光结构将辐射照射至伸入保温盒内的涂胶头,对涂胶头进行保温,同时有效避免涂胶头内的胶水滴落在电热丝上,使电热丝能够更好的工作。
技术特征:
1.一种高精度的涂胶工业机器人,包括机械臂(1),所述机械臂(1)的末端连接有安装柱(3),其特征在于:所述安装柱(3)的底端通过波纹管(4)连接有涂胶头(5),所述安装柱(3)的侧面皆设置有相互平行的滑轨(8)与齿条(11),所述滑轨(8)上滑动连接有滑块(9),所述滑块(9)上固定连接有电机(10),所述电机(10)的输出端通过连接结构固定连接有与齿条(11)啮合的齿轮(13),所述齿轮(13)的中心远离电机(10)的一端固定连接有齿轮轴(12),所述齿轮轴(12)通过阻尼结构转动连接有第一连杆(17),所述第一连杆(17)转动连接有第二连杆(18),所述第二连杆(18)转动连接在涂胶头(5)侧面的连接结构上。
2.根据权利要求1所述的高精度的涂胶工业机器人,其特征在于:所述安装柱(3)与涂胶头(5)皆有四个侧面,且相邻侧面相互正交。
3.根据权利要求1所述的高精度的涂胶工业机器人,其特征在于:所述涂胶头(5)的中心竖向贯通并设置有涂胶软管(29),所述涂胶头(5)内在涂胶软管(29)的两侧滑动设置有第二斜块(26),所述第二斜块(26)的斜面贴合有第一斜块(25),所述涂胶头(5)内设置有限制第一斜块(25)横向滑动以及第二斜块(26)竖向滑动的限位结构。
4.根据权利要求3所述的高精度的涂胶工业机器人,其特征在于:所述涂胶头(5)相对的两端固定设置有固定杆(19),而相对的两侧皆设置有活动杆开口(21),所述涂胶头(5)内上下滑动设置有移块(23),所述移块(23)的一端朝向活动杆开口(21)方向固定连接有伸出涂胶头(5)的活动杆(20),所述移块(23)的另一端固定连接第一斜块(25)。
5.根据权利要求3所述的高精度的涂胶工业机器人,其特征在于:所述第二斜块(26)与涂胶头(5)的内壁之间设置有复位弹簧(28),所述复位弹簧(28)用于使第二斜块(26)远离涂胶软管(29)方向滑动。
6.根据权利要求4所述的高精度的涂胶工业机器人,其特征在于:所述涂胶头(5)在移块(23)的滑动轨道与移块(23)之间设置也有阻尼结构,并且所述涂胶头(5)与移块(23)之间的阻尼力度大于齿轮轴(12)处的阻尼力度。
7.根据权利要求1所述的高精度的涂胶工业机器人,其特征在于:所述机械臂(1)的一侧设置有工作台(2),所述工作台(2)的一侧固定设置有保温盒(30),所述保温盒(30)内设置有电热丝(32)。
8.根据权利要求7所述的高精度的涂胶工业机器人,其特征在于:所述保温盒(30)顶端的开口处向内倾斜设置有斜挡板(31),所述电热丝(32)设置在斜挡板(31)的背面,所述保温盒(30)的内壁设置有反光板(33),并且底端设置有漏胶口(34)。
技术总结
本发明公开了一种高精度的涂胶工业机器人,涉及涂胶工业机器人领域,包括机械臂,所述机械臂的末端连接有安装柱,所述安装柱的底端通过波纹管连接有涂胶头,安装柱的侧面皆设置有滑轨与齿条,所述滑轨上滑动连接有电机,所述电机的输出端通连接有与齿条啮合的齿轮,所述齿轮连接有齿轮轴,所述齿轮轴通过阻尼结构转动连接有连杆结构,连杆结构连接在涂胶头侧面的连接结构上。本发明在机械臂的末端设置安装柱,利用波纹管连接安装柱与涂胶头,并且在安装柱的四周设置电动的连杆结构,用电动电杆结构控制涂胶头的朝向,同时利用驱动电动连杆结构的电机驱使涂胶头远离或是靠近安装柱,使高精度的涂胶工业机器人的涂胶头更为灵活。
技术研发人员:刘猛
受保护的技术使用者:安徽辰德精密机械有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!