风电叶片喷涂机器人
本发明属于喷涂机器,特别涉及一种风电叶片喷涂机器人。
背景技术:
1、风电叶片的大型化将有利于进一步增强风电机组的捕风能力,扫风面积同发电功率呈正比,增加叶片长度可直接的提升单机组发电量。全球最长的123米风电叶片,将适配16mw的海上风电机组。其叶片直径达5000mm以上,成品总重达到62吨,与之伴随的还有超过1000m2以上的表面积。由2007年的40.5m、1.5mw,至今的123m、16mw,叶片的大型化是不可逆转的趋势。风电叶片的涂装作业是基于叶片外表面打磨作业之后的一项工序,当前叶片生产涂装过程中所包含漆料主要有底漆、面漆与警示漆等,各漆料成分主要由主剂、固化剂与稀释剂组成。当前风电叶片的涂装作业仍然以人工作业为主,开发高效低污染的全自动涂装设备成为迫切需求。当前人工进行叶片涂装作业具有以下难点:
2、1.风电叶片的大型化,尤其是海上超百米风电叶片通常具有1000m2以上的表面积,而人工手持工具宽度不超过0.5m,以至于风电叶片涂装作业存在大量重复性劳动,成为除叶片铺层工艺外,最耗工时的工序。
3、2.由于玻璃纤维作为风电叶片当前不可替代的主材,涂装前需要将叶片外表面整体进行打磨作业,更甚者涂装与打磨作业处于同一厂房,被磨削的玻璃粉尘肆意在空气中、或沉积与地面,导致极差的工作环境,工人至少需要佩戴n95级口罩进行作业,直接导致工人及其容易患上相应的职业病。
4、3.人工作业附属装备杂,例如为应对叶片不同高度的作业区域,需要大量的不同高度登梯架,且出于安全操作规范,严禁边进行作业,边移动登梯架。此外还有混料桶、过滤纱布等,均提升了作业的复杂程度,降低生产效率。
5、4.工人流动性大,生产难以保证工人数量稳定,生产旺季容易出现待滚涂叶片囤积,交货周期延长等。此外工人的作业熟练度,疲劳程度等,均会影响作业品质。
6、由以上分析人工涂装作业带来的缺点,研发出一种风电叶片自动喷涂机器人,进一步促进风电叶片智能化生产,具有非常重要的现实意义。
技术实现思路
1、针对现有技术的不足,本发明提供了一种风电叶片喷涂机器人,通过喷涂执行机构中喷涂机构衔接板与侧斜转动底板之间连接关系的设置以及转动支架和侧斜转动底板之间连接关系的设置,从而便于调整侧倾角度和俯仰角度,使得其能高效稳定的进行风电叶片喷涂作业;喷涂执行机构中的多孔气排还能使得喷涂区域与外界隔绝,从而创造良好的喷涂环境。
2、为实现上述目的,本发明公开了如下技术方案:
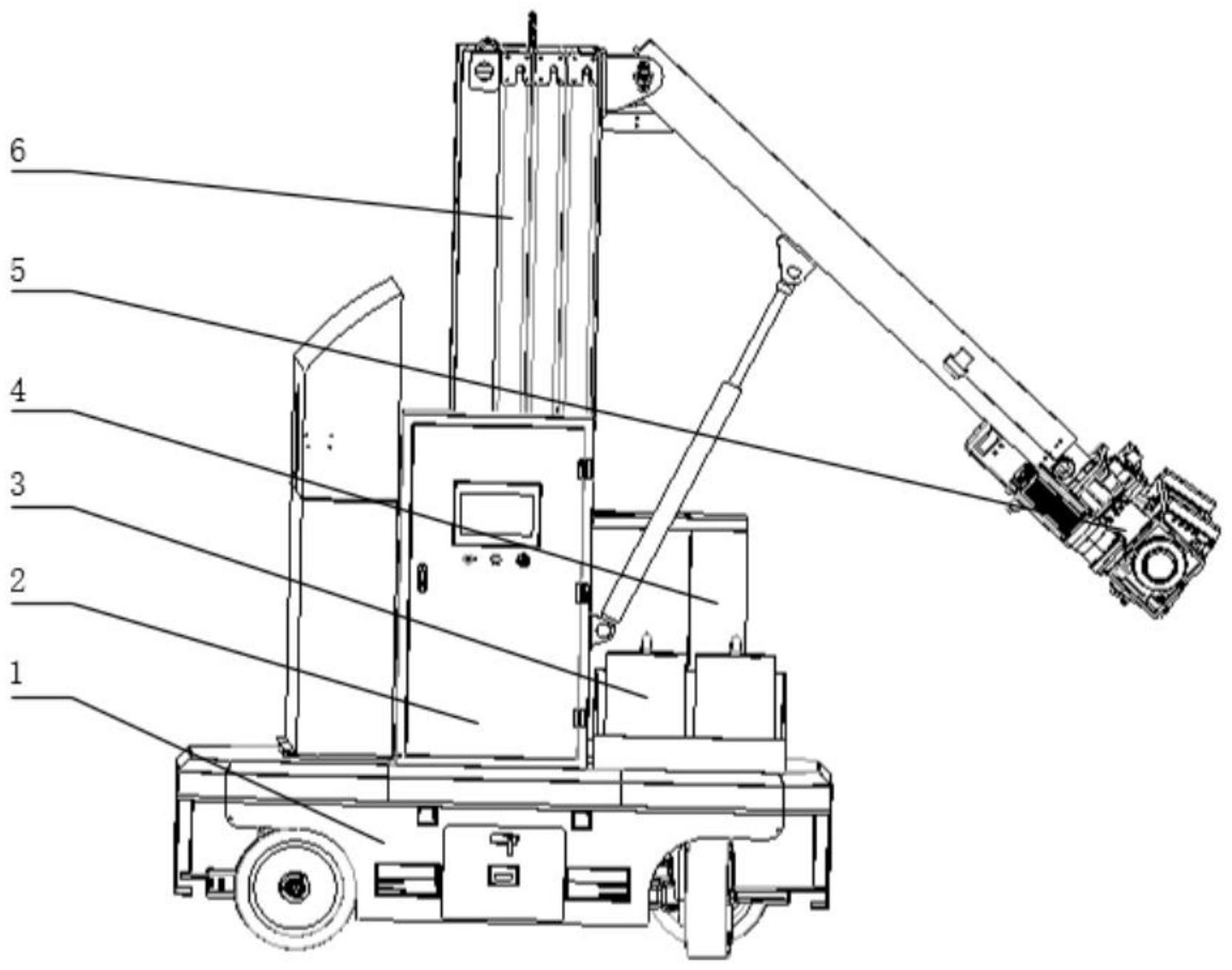
3、一种风电叶片喷涂机器人,其包括移动装置、喷涂执行机构和机械臂;所述喷涂执行机构和机械臂均设置在所述移动装置上;所述喷涂执行机构包括驱动端和执行端;所述驱动端与所述执行端连接;所述执行端包括喷涂机构衔接板、侧斜转动底板、双喷腔和多孔气排;所述喷涂机构衔接板的第一端与所述侧斜转动底板的顶面的第一端铰接,所述喷涂机构衔接板的第二端通过驱动器与所述侧斜转动底板的顶面的第二端连接;所述侧斜转动底板为倒u形结构,所述侧斜转动底板的u形侧壁的中心空间内设置有所述双喷腔,所述双喷腔的喷嘴处于所述侧斜转动底板对立设置;所述多孔气排设置在所述双喷腔的四周,且所述多孔气排的排气孔与所述喷嘴的方向一致;所述驱动端包括驱动电机和驱动器;所述驱动电机与所述侧斜转动底板的一侧连接,且所述驱动电机远离所述驱动器;所述驱动器别设置在所述喷涂机构衔接板上;所述驱动器能调整所述喷涂机构衔接板与所述侧斜转动底板之间的角度;所述机械臂包括回转支撑板、液压泵站、多级升降装置、开合装置、伸缩装置和机械臂输出衔接板;所述液压泵站和多级升降装置设置在所述回转支撑板上,所述多级升降装置的第一端与所述回转支撑板连接,所述多级升降装置的第二端与所述机械臂输出衔接板的第一端连接,所述机械臂输出衔接板的第二端上设置有所述伸缩结构;所述开合装置的第一端与所述多级升降装置的侧壁连接,所述开合装置的第二端与所述机械臂输出衔接板的侧壁连接。
4、可优选的,所述移动装置包括承载板、底盘外壳、车架、抽屉、舵轮驱动单元和回转承载装置;所述承载板的上方设置有所述底盘外壳,所述承载板的下方设置有所述车架;所述车架上开设有叉车槽和抽屉,所述车架的两侧分别设置有多个所述舵轮驱动单元,所述回转承载装置设置在所述底盘外壳的中部。
5、可优选的,所述喷涂机构衔接板的第一端与所述侧斜转动底板的顶面的第一端铰接处设置有角度编码器,能检测并控制驱动器,从而控制喷涂机构衔接板与侧斜转动底板的顶面之间的角度。
6、可优选的,所述侧斜转动底板的侧面还设置有液压电磁开关阀、气源电磁开关阀、气压表和激光测距传感器;所述液压电磁开关阀、气源电磁开关阀、气压表和激光测距传感器均分别与电控装置连接。
7、可优选的,其还包括配电模块、涂料泵送装置和空气压缩装置;所述配电模块分别与移动装置、喷涂执行机构、机械臂、涂料泵送装置和空气压缩装置电连接,并为其提供电力支撑;所述涂料泵送装置的泵送端与所述双喷腔的内部连通;所述空气压缩装置的输出端与所述多孔气排连通。
8、可优选的,其还包括总控制单元,所述总控制单元分别与移动装置、喷涂执行机构、机械臂、配电模块、涂料泵送装置和空气压缩装置无线连接,能接收各元器件传递的信号,并对传递的信号进行数据处理和分析后下发操作指令。
9、另一方面,本发明还公开了一种风电叶片喷涂机器人的角度控制方法,侧倾角度控制过程如下:
10、s1、计算喷涂装置姿态与叶片偏差的偏距角度,计算公式如下:
11、
12、式中,参数l1和l2表示喷涂装置所对应的俯仰激光传感器分别测量的喷涂装置至风电叶片表面的距离,d表示俯仰激光传感器之间的安装距离,θ表示喷涂装置姿态与叶片偏差的偏距角度;
13、s2、基于喷涂装置姿态与叶片偏差的偏距角度,通过模糊pid控制调整前端喷涂装置的侧倾角度和俯仰角度,直至调整θ至零度,使参数l1和l2相等,保证喷涂装置与叶片表面在喷涂点处的水平切线平行,并且在喷涂过程中进行实时调控,实现对风电叶片表面纵向的实时位置追踪。
14、另一方面,本发明还公开了一种风电叶片喷涂机器人的开合装置的控制方法,
15、所述多级升降装置与伸缩结构之间借助开合装置进行角度调节,调节角度为:
16、
17、其中,表示机械臂开合角速度,γ表示伸缩机械臂与调角液压缸的夹角;
18、所述开合装置的速度通过以下公式计算:
19、
20、其中,vα为角度调节液压缸的运行速度,为机械臂开合角速度,l3表示开合装置在多级升降装置上的安装位置距离机械臂调角回转中心的距离,l4表示开合装置在伸缩装置上的安装位置距离机械臂调角回转中心的距离,α为升降与伸缩机械臂之间的夹角。
21、进一步的,γ通过以下公式计算,
22、其中,l3表示开合装置在多级升降装置上的安装位置距离机械臂调角回转中心的距离;l4表示开合装置在伸缩装置上的安装位置距离机械臂调角回转中心的距离,α为升降与伸缩机械臂之间的夹角。
23、与现有技术相比,本发明具有以下有益效果:
24、1、在本发明提供一种风电叶片喷涂机器人,通过设置喷涂执行机构从而使得风电叶片上的喷涂工作更加的便捷,同时通过驱动器控制喷涂机构衔接板与侧斜转动底板之间的侧倾角度以及控制转动支架和侧斜转动底板之间俯仰角度,从而使得喷涂执行机构能有效的对叶片实现均匀喷涂。
25、2、本发明中在双喷腔的四周设置有多孔气排,多孔气排在工作时将喷出大量的气体形成气墙已实现气密封的作用,气密封能有效的防止多余喷涂颗粒扩散至空气中,极大地改良了工作环境,大幅直接的、间接的降低了各类喷涂作业风险。
26、3、本发明通过对开合装置驱动角度的控制,使得本装置在工作过程中能更准确快捷的进行操作,从而大幅度降低工作时间。
- 还没有人留言评论。精彩留言会获得点赞!