一种宠物食物搅碎装置及其搅碎方法与流程
本发明涉及宠物智能设备,尤其涉及一种宠物食物搅碎装置及其搅碎方法。
背景技术:
1、目前,宠物食物一般经过简单地处理后直接喂食给宠物,然而这种处理是按照固定的模式进行的,很容易对某些种类的宠物食物造成破坏,更甚者导致某些种类的宠物食物的营养成分流失,降低宠物食物的食用效果。
技术实现思路
1、鉴于上述的分析,本发明实施例旨在提供一种宠物食物搅碎装置及其搅碎方法,用以解决现有宠物食物处理效果差的问题。
2、一方面,本发明提供了一种宠物食物搅碎装置的搅碎方法,至少能够应用于宠物食物搅碎装置,所述宠物食物搅碎装置包括杯体和杯盖,所述杯盖上设置有搅碎组件和摄像组件,所述搅碎方法包括:
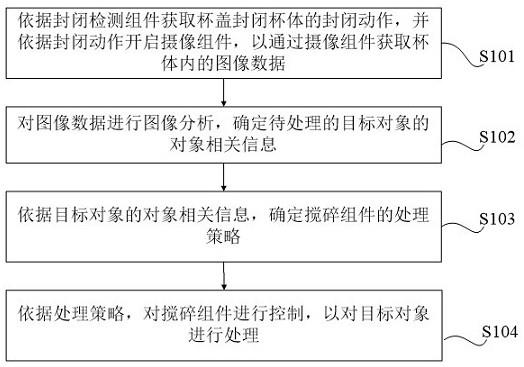
3、依据封闭检测组件获取杯盖封闭杯体的封闭动作,并依据封闭动作开启摄像组件,以通过摄像组件获取杯体内的图像数据;
4、对图像数据进行图像分析,确定待处理的目标对象的对象相关信息;
5、依据目标对象的对象相关信息,确定搅碎组件的处理策略;
6、依据处理策略,对搅碎组件进行控制,以对目标对象进行处理。
7、进一步地,所述依据处理策略,对搅碎组件进行控制,包括:
8、依据方位角传感器获取方位角信息;
9、依据方位角信息确定杯体的方位状态信息,所述方位状态信息包括:正立状态、倒立状态、目标方向的侧立状态;
10、依据方位状态信息,确定控制方案,并按照控制方案对搅碎组件进行控制。
11、进一步地,所述依据方位状态信息,确定控制方案,包括:
12、按照杯体的方位状态信息,确定历史方位状态信息和当前方位状态信息;
13、依据历史方位状态信息和处理策略,确定当前方位状态对应的当前控制方案。
14、进一步地,所述封闭检测组件包括方位角传感器,所述依据封闭检测组件获取杯盖封闭杯体的封闭动作,包括:
15、通过方位角传感器检测杯盖的方位角信息;
16、依据方位角信息,确定杯盖的旋转方向,并依据旋转方向确定杯盖旋入杯体的封闭动作。
17、进一步地,所述依据封闭动作开启摄像组件,以通过摄像组件获取杯体内的图像数据,包括,以下方式中的至少一个:
18、在检测到封闭动作之后,确定杯盖在封闭动作过程中的间歇静止状态,并在间歇静止状态时开启摄像组件,以通过摄像组件获取杯体内的图像数据;
19、在检测到封闭动作之后,确定封闭动作的结束静止状态,并在结束静止状态时,开启摄像组件,以通过摄像组件获取杯体内的图像数据。
20、进一步地,所述确定杯盖在封闭动作过程中的间歇静止状态,包括:
21、将封闭动作开始时的初始方位角信息输入到杯盖状态分析模型中,确定间歇方位角信息,所述杯盖状态分析模型依据历史方位角信息和采集的图像数据质量确定;
22、在方位角信息到达间歇方位角信息时,确定杯盖处在封闭动作过程中的间歇静止状态。
23、进一步地,所述封闭检测组件包括设置在杯盖上用于与杯体侧壁接触触发的触发组件,所述触发组件包括沿竖直方向设置的至少两个触发件;
24、所述依据封闭检测组件获取杯盖封闭杯体的封闭动作,包括:
25、依据触发组件的触发信息,确定杯盖封闭杯体的封闭动作。
26、进一步地,所述对图像数据进行图像分析,确定待处理的目标对象的对象相关信息,包括:
27、从图像数据的预设位置截取至少一张子图像,依据子图像与各类别的搅碎对象的对照图像进行匹配,所述预设位置为与搅碎组件交错的位置;
28、依据匹配结果,确定目标对象的对象相关信息。
29、另一方面,本发明提供了一种宠物食物搅碎装置,至少能够执行上述的搅碎方法,所述宠物食物搅碎装置包括杯体和杯盖,所述杯盖上设置有搅碎组件和摄像组件;所述宠物食物搅碎装置还包括:
30、图像数据采集模块,用于依据封闭检测组件获取杯盖封闭杯体的封闭动作,并依据封闭动作开启摄像组件,以通过摄像组件获取杯体内的图像数据;
31、图像数据分析模块,用于对图像数据进行图像分析,确定待处理的目标对象的对象相关信息;
32、处理策略生成模块,用于依据目标对象的对象相关信息,确定搅碎组件的处理策略;
33、搅碎组件控制模块,用于依据处理策略,对搅碎组件进行控制,以对目标对象进行处理。
34、进一步地,所述杯盖中设有控制中心,所述控制中心能够执行上述的搅碎方法。
35、与现有技术相比,本发明至少可实现的有益效果之一:本发明通过封闭检测组件获取用户使用杯盖封闭杯体的封闭动作,并依据封闭动作来自动开启摄像组件,进而拍摄图像数据;拍摄到图像数据之后,依据图像数据进行分析,进而确定待处理的目标对象的对象相关信息,对象相关信息可以包括食物的种类等信息。进而依据对象相关信息,确定对于该食物的处理策略。并按照处理策略对搅碎组件的搅拌功率、搅拌速度、搅拌力度、搅拌位置等进行控制和调整,以更好地对宠物食物进行处理,提高对宠物食物的处理效果,方便宠物更好地食用吸收宠物食物。此外,本发明可以通过检测用户的封闭动作来自动开启摄像组件,可以更早的采集数据并进行分析,从而更快的响应用户的操作来开始食物处理。
36、本发明中,上述各技术发明之间还可以相互组合,以实现更多的优选组合发明。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
技术特征:
1.一种宠物食物搅碎装置的搅碎方法,其特征在于,至少能够应用于宠物食物搅碎装置,所述宠物食物搅碎装置包括杯体和杯盖,所述杯盖上设置有搅碎组件和摄像组件,所述搅碎方法包括:
2.根据权利要求1所述的搅碎方法,其特征在于,所述依据处理策略,对搅碎组件进行控制,包括:
3.根据权利要求2所述的搅碎方法,其特征在于,所述依据方位状态信息,确定控制方案,包括:
4.根据权利要求2所述的搅碎方法,其特征在于,所述封闭检测组件包括方位角传感器,所述依据封闭检测组件获取杯盖封闭杯体的封闭动作,包括:
5.根据权利要求4所述的搅碎方法,其特征在于,所述依据封闭动作开启摄像组件,以通过摄像组件获取杯体内的图像数据,包括,以下方式中的至少一个:
6.根据权利要求5所述的搅碎方法,其特征在于,所述确定杯盖在封闭动作过程中的间歇静止状态,包括:
7.根据权利要求1所述的搅碎方法,其特征在于,所述封闭检测组件包括设置在杯盖上用于与杯体侧壁接触触发的触发组件,所述触发组件包括沿竖直方向设置的至少两个触发件;
8.根据权利要求1所述的搅碎方法,其特征在于,所述对图像数据进行图像分析,确定待处理的目标对象的对象相关信息,包括:
9.一种宠物食物搅碎装置,其特征在于,至少能够执行如权利要求1~8任一所述的搅碎方法,所述宠物食物搅碎装置包括杯体和杯盖,所述杯盖上设置有搅碎组件和摄像组件;所述宠物食物搅碎装置还包括:
10.根据权利要求9所述的宠物食物搅碎装置,其特征在于,所述杯盖中设有控制中心,所述控制中心能够执行如权利要求1~8任一所述的搅碎方法。
技术总结
本发明涉及一种宠物食物搅碎装置及其搅碎方法,用以解决现有宠物食物处理效果差的问题。其中,所述搅碎方法,至少能够应用于宠物食物搅碎装置,所述宠物食物搅碎装置包括杯体和杯盖,所述杯盖上设置有搅碎组件和摄像组件,所述搅碎方法包括:依据封闭检测组件获取杯盖封闭杯体的封闭动作,并依据封闭动作开启摄像组件,以通过摄像组件获取杯体内的图像数据;对图像数据进行图像分析,确定待处理的目标对象的对象相关信息;依据目标对象的对象相关信息,确定搅碎组件的处理策略;依据处理策略,对搅碎组件进行控制,以对目标对象进行处理。
技术研发人员:陈辉
受保护的技术使用者:北京猫猫狗狗科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!