基于PLC的喷涂机器人控制系统
本发明涉及喷涂机器人,具体为基于plc的喷涂机器人控制系统。
背景技术:
1、高层建筑物的壁面喷涂是一项量大面广的作业,在我国高空作业最原始的方法是通过架设脚手支架,进行人工喷涂作业,一个喷涂工程完毕后再撤除脚手支架,然后进行下一个工程的喷涂作业,这种方式费时费力,需要大量的材料来搭建脚手支架,特别是对于高层建筑外墙的喷涂成本更高,而且效率低,工人长期在此环境中工作会对他们的身体有损伤。
2、目前我国对高层建筑外墙的喷涂工作主要是用特定的载人提升设备吊篮,将工人及喷涂工具和材料等依次悬挂于墙面四周,通过工人手持喷枪对墙面进行喷涂,但是高空中由于有强气流的存在使工人很难保持平衡,工人易发生坠落,造成伤亡事故发生,存在一定安全隐患。
3、为此我们提出了基于plc的喷涂机器人控制系统。
技术实现思路
1、本发明的目的在于提供基于plc的喷涂机器人控制系统,具备喷涂机器人完成喷涂工作的优点,解决了背景技术中的问题。
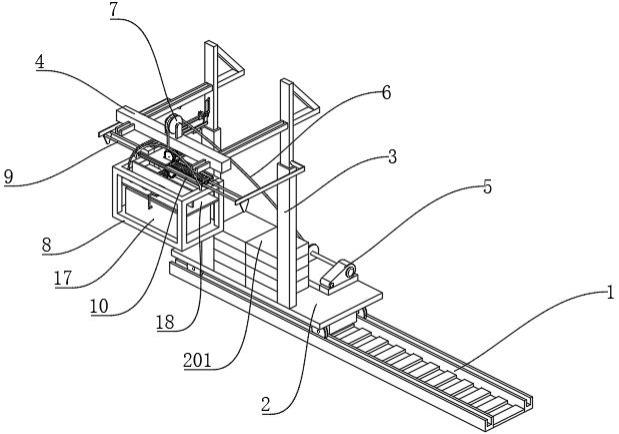
2、为实现上述目的,本发明提供如下技术方案:基于plc的喷涂机器人控制系统,该系统包括轨道,所述轨道上设有进给悬挂机构;
3、所述进给悬挂机构包括轨道上活动连接有进行水平往复移动的移动车,所述移动车一侧的两端对称位置均固定连接有支撑架,所述支撑架上固定连接有避障进给装置,且移动车上靠近支撑架的一侧上固定连接有提高进给悬挂机构稳定性的重块,所述移动车远离支撑架的一侧固定连接有卷扬机,所述卷扬机上滚卷收纳有拉绳,所述避障进给装置上固定连接有对拉绳进行限位的尼龙轮,且拉绳在尼龙轮外轮廓的滑槽内活动连接,所述拉绳设有对墙面进行喷涂操作的喷涂机器人。
4、优选的,所述喷涂机器人包括拉绳上靠近尼龙轮的一端固定连接有矩形框,所述矩形框的顶部固定连接有第一滑轨,所述第一滑轨上活动连接有进行水平往复移动的第二滑轨,所述第二滑轨上活动连接有进行水平往复移动的移动板,所述移动板上的一侧固定连接有伸缩杆,所述伸缩杆远离移动板的一端固定连接有矩形板,所述矩形板上固定连接有喷头,所述移动板上靠近伸缩杆的一端固定连接有对矩形板和喷头进行伸缩调节的电动缸,且移动车上设有对喷头与墙面距离检测的超声波传感器。
5、优选的,所述矩形框上固定连接有存放涂料的储料箱,所述储料箱上固定连接有t形板,所述t形板的一侧固定连接有对储料箱内部涂料进行抽排的泵,所述泵上的进液管与储料箱相连通,且泵上的排液管与喷头相连通,所述矩形框上远离第一滑轨一侧的两端对称位置均固定连接有减缓气流的风扇。
6、优选的,所述第二滑轨上下两个面上均固定连接有齿牙板,所述移动板上远离伸缩杆的一端固定连接有由电机带动转动的第一齿轮,且t形板上固定连接有由电机带动转动的第二齿轮,且第二齿轮和第一齿轮均与第二滑轨上下两个面上的齿牙板进行啮合传动。
7、优选的,所述矩形板上设有对墙面上异物进行清洁的清洁机构,所述清洁机构包括矩形板底部的一端通过销轴转动连接有凸轮,所述凸轮上凸块相对称位置固定连接有对墙面上异物进行刮除的毛刷。
8、优选的,所述矩形板上远离凸轮的一端固定连接有u形框,所述u形框靠近凸轮一端的内壁活动连接有对凸轮进行支撑的矩形滑块,所述矩形滑块与u形框相对面上固定连接有推动矩形滑块进行复位移动的弹簧,所述第一滑轨的两端均固定连接有推动毛刷进行往复摆动的l形杆。
9、优选的,所述喷涂机器人上设有控制模块,所述控制模块包括plc控制、算法控制、传感器检测和上位机四个部分。
10、优选的,所述喷涂机器人四周均设有对周围障碍物进行检测的激光传感器和超声波传感器,且喷涂机器人顶部安装有风杯式风速传感器。
11、与现有技术相比,本发明的有益效果如下:
12、通过将plc用于喷涂机器人控制系统。区别于传统喷涂机器人基于嵌入式的控制系统,我们将基于plc作为喷涂机器人的控制系统。
13、通过改良pid控制算法,将其与模糊控制算法相结合,从而可以实时调整pid控制算法的参数,能够更好的使喷涂机器人维持稳定。
14、伴随着喷头15往复移动进行喷涂作业时,使得毛刷能够对墙表面上粘附的异物进行清扫,进一步避免了墙表面存在异物造成墙面喷涂缺失,存在空白面。
15、通过上述结构的配合使用解决了,用特定的载人提升设备吊篮,将工人及喷涂工具和材料等依次悬挂于墙面四周,通过工人手持喷枪对墙面进行喷涂,但是高空中由于有强气流的存在使工人很难保持平衡,工人易发生坠落,造成伤亡事故发生,存在一定安全隐患的问题。
技术特征:
1.基于plc的喷涂机器人控制系统,其特征在于:该系统包括轨道(1),所述轨道(1)上设有进给悬挂机构;
2.根据权利要求1所述的基于plc的喷涂机器人控制系统,其特征在于:所述喷涂机器人包括拉绳(6)上靠近尼龙轮(7)的一端固定连接有矩形框(8),所述矩形框(8)的顶部固定连接有第一滑轨(9),所述第一滑轨(9)上活动连接有进行水平往复移动的第二滑轨(10),所述第二滑轨(10)上活动连接有进行水平往复移动的移动板(11),所述移动板(11)上的一侧固定连接有伸缩杆(12),所述伸缩杆(12)远离移动板(11)的一端固定连接有矩形板(14),所述矩形板(14)上固定连接有喷头(15),所述移动板(11)上靠近伸缩杆(12)的一端固定连接有对矩形板(14)和喷头(15)进行伸缩调节的电动缸(16),且移动车(2)上设有对喷头(15)与墙面距离检测的超声波传感器。
3.根据权利要求2所述的基于plc的喷涂机器人控制系统,其特征在于:所述矩形框(8)上固定连接有存放涂料的储料箱(17),所述储料箱(17)上固定连接有t形板(18),所述t形板(18)的一侧固定连接有对储料箱(17)内部涂料进行抽排的泵(19),所述泵(19)上的进液管与储料箱(17)相连通,且泵(19)上的排液管与喷头(15)相连通,所述矩形框(8)上远离第一滑轨(9)一侧的两端对称位置均固定连接有减缓气流的风扇(29)。
4.根据权利要求2所述的基于plc的喷涂机器人控制系统,其特征在于:所述第二滑轨(10)上下两个面上均固定连接有齿牙板(20),所述移动板(11)上远离伸缩杆(12)的一端固定连接有由电机带动转动的第一齿轮(21),且t形板(18)上固定连接有由电机带动转动的第二齿轮(22),且第二齿轮(22)和第一齿轮(21)均与第二滑轨(10)上下两个面上的齿牙板(20)进行啮合传动。
5.根据权利要求2所述的基于plc的喷涂机器人控制系统,其特征在于:所述矩形板(14)上设有对墙面上异物进行清洁的清洁机构,所述清洁机构包括矩形板(14)底部的一端通过销轴转动连接有凸轮(26),所述凸轮(26)上凸块相对称位置固定连接有对墙面上异物进行刮除的毛刷(27)。
6.根据权利要求5所述的基于plc的喷涂机器人控制系统,其特征在于:所述矩形板(14)上远离凸轮(26)的一端固定连接有u形框(23),所述u形框(23)靠近凸轮(26)一端的内壁活动连接有对凸轮(26)进行支撑的矩形滑块(24),所述矩形滑块(24)与u形框(23)相对面上固定连接有推动矩形滑块(24)进行复位移动的弹簧(25),所述第一滑轨(9)的两端均固定连接有推动毛刷(27)进行往复摆动的l形杆(28)。
7.根据权利要求1所述的基于plc的喷涂机器人控制系统,其特征在于:所述喷涂机器人上设有控制模块,所述控制模块包括plc控制、算法控制、传感器检测和上位机四个部分。
8.根据权利要求7所述的基于plc的喷涂机器人控制系统,其特征在于:所述喷涂机器人四周均设有对周围障碍物进行检测的激光传感器和超声波传感器,且喷涂机器人顶部安装有风杯式风速传感器。
技术总结
本发明公开了基于PLC的喷涂机器人控制系统,该系统包括轨道,所述轨道上设有进给悬挂机构,所述进给悬挂机构包括轨道上活动连接有进行水平往复移动的移动车,所述移动车一侧的两端对称位置均固定连接有支撑架,所述支撑架上固定连接有避障进给装置,且移动车上靠近支撑架的一侧上固定连接有提高进给悬挂机构稳定性的重块,所述移动车远离支撑架的一侧固定连接有卷扬机,所述卷扬机上滚卷收纳有拉绳,所述避障进给装置上固定连接有对拉绳进行限位的尼龙轮,且拉绳在尼龙轮外轮廓的滑槽内活动连接,所述拉绳设有对墙面进行喷涂操作的喷涂机器人,本申请具有通过PLC控制系统控制喷涂机器人完成喷涂工作,进一步提高工作效率。
技术研发人员:段辉义,郭志坚
受保护的技术使用者:内蒙古工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!