路亚鱼饵精细化喷涂机器人系统
本发明涉及钓鱼用假鱼饵制造,具体而言,涉及一种路亚鱼饵精细化喷涂机器人系统。
背景技术:
1、使用路亚鱼竿钓鱼过程中,假饵用来引诱鱼类上钩,假饵的形状类似小鱼、虾或虫类。假饵的生产工艺中,通过以塑料、金属或硅胶为原材料生产,定型后需要对假饵进行喷漆上色处理。
2、目前,主要是采用人工喷涂的作业方式,操作工人手持喷枪对挂在流水线上的假饵进行喷漆上色,喷涂完正面再喷背面,这种方式存在劳动强度大、人工成本高、效率低的技术问题。
技术实现思路
1、本发明就是为了解决现有假鱼饵生产过程中采用人工喷涂方式进行喷漆,劳动强度大、人工成本高、效率低的技术问题,提供了一种代替人工喷涂,提高作业效率的路亚鱼饵精细化喷涂机器人系统。
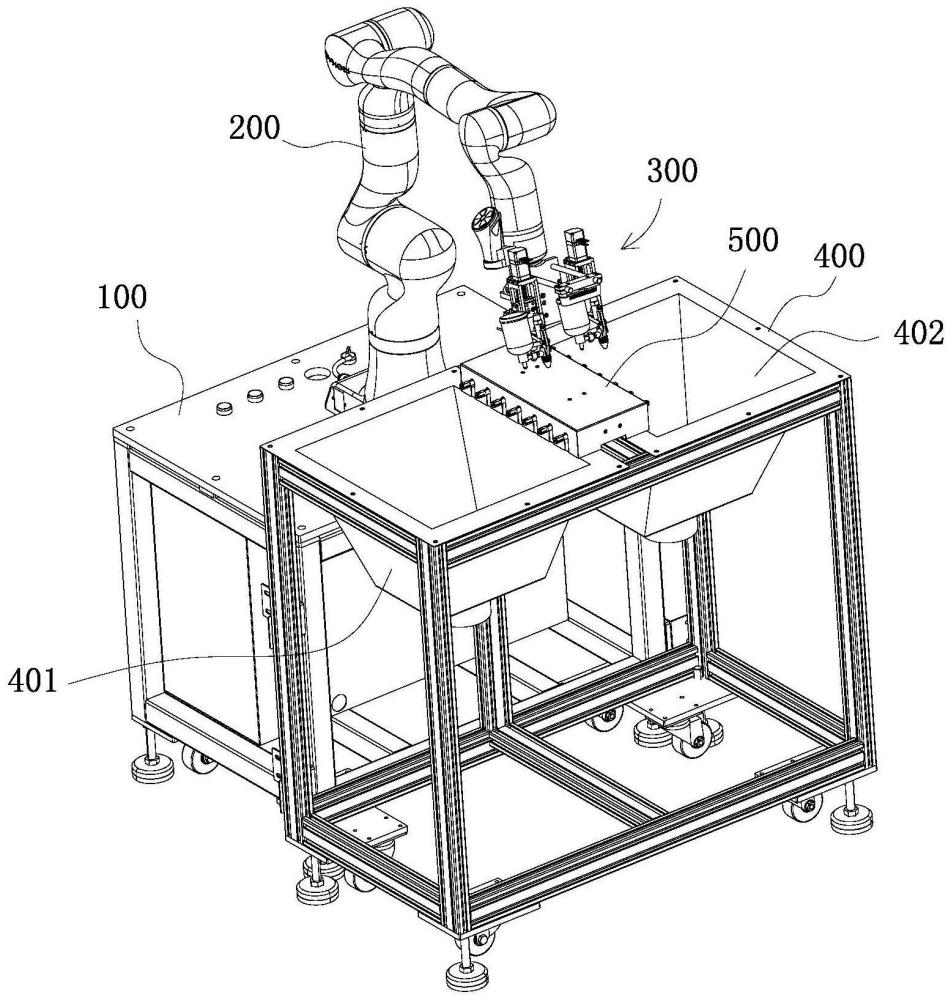
2、本发明提供一种路亚鱼饵精细化喷涂机器人系统,包括机械臂连接支架、机械臂、执行末端、工作台和鱼饵定位装置,机械臂与机械臂连接支架连接,执行末端与机械臂的末端连接,鱼饵定位装置与工作台的中部连接;
3、执行末端包括固定架、第一气动油漆喷枪、第二气动油漆喷枪、第一喷枪自动开启机构和第二喷枪自动开启机构,第一喷枪自动开启机构、第二喷枪自动开启机构分别固定连接在固定架上,第一气动油漆喷枪连接定位在第一喷枪自动开启机构上,第二气动油漆喷枪连接定位在第二喷枪自动开启机构上;固定架与机械臂的末端固定连接;
4、第一喷枪自动开启机构包括第一固定块、第一支撑框架、第一伸缩架、第一螺母座、第一丝杆和第一驱动电机,第一支撑框架与第一固定块固定连接,第一驱动电机固定连接在第一支撑框架上,第一丝杆与第一驱动电机的输出轴固定连接,第一丝杆位于第一支撑框架的空间内,第一螺母座与第一丝杆连接,第一螺母座位于第一支撑框架的空间内,第一伸缩架的后端与第一螺母座的两侧固定连接,第一伸缩架的前端设有第一压杆,第一伸缩架位于第一固定块的两侧,第一压杆位于第一固定块的前面;第一固定块设有连接孔,第一固定块的前部设有第一阻挡斜面;
5、第一固定块与固定架固定连接;
6、第二喷枪自动开启机构包括第二固定块、第二支撑框架、第二伸缩架、第二螺母座、第二丝杆和第二驱动电机,第二支撑框架与第二固定块固定连接,第二驱动电机固定连接在第二支撑框架上,第二丝杆与第二驱动电机的输出轴固定连接,第二丝杆位于第二支撑框架的空间内,第二螺母座与第二丝杆连接,第二螺母座位于第二支撑框架的空间内,第二伸缩架的后端与第二螺母座的两侧固定连接,第二伸缩架的前端设有第二压杆,第二伸缩架位于第二固定块的两侧,第二压杆位于第二固定块的前面;第二固定块设有连接孔,第二固定块的前部设有第二阻挡斜面;
7、第二固定块与固定架固定连接;
8、第一气动油漆喷枪设有手柄和扣压扳机,第一气动油漆喷枪的手柄插入第一固定块的连接孔中,第一气动油漆喷枪的扣压扳机位于第一压杆和第一阻挡斜面之间;第二气动油漆喷枪设有手柄和扣压扳机,第二气动油漆喷枪的手柄插入第二固定块的连接孔中,第二气动油漆喷枪的扣压扳机位于第二压杆和第二阻挡斜面之间;第一气动油漆喷枪和第二气动油漆喷枪并排布置;
9、鱼饵定位装置包括基座、第一鱼饵连接杆、第一主动齿轮、第一左鱼饵连接杆、第二左鱼饵连接杆、第三左鱼饵连接杆、第一左从动齿轮、第二左从动齿轮、第三左从动齿轮、第一左中间过渡齿轮、第二左中间过渡齿轮、第三左中间过渡齿轮、第一右鱼饵连接杆、第二右鱼饵连接杆、第三右鱼饵连接杆、第一右从动齿轮、第二右从动齿轮、第三右从动齿轮、第一右中间过渡齿轮、第二右中间过渡齿轮、第三右中间过渡齿轮、从动同步带轮、主动同步带轮、同步带和翻转驱动电机,第一鱼饵连接杆穿过基座,第一鱼饵连接杆通过轴承与基座转动连接,第一主动齿轮与第一鱼饵连接杆的中部固定连接,第一左鱼饵连接杆穿过基座,第一左鱼饵连接杆通过轴承与基座转动连接,第二左鱼饵连接杆穿过基座并通过轴承与基座转动连接,第三左鱼饵连接杆穿过基座并通过轴承与基座转动连接,第一左从动齿轮与第一左鱼饵连接杆的中部固定连接,第二左从动齿轮与第二左鱼饵连接杆的中部固定连接,第三左从动齿轮与第三左鱼饵连接杆的中部固定连接,第一左中间过渡齿轮通过轴承与基座转动连接,第一左中间过渡齿轮与第一主动齿轮啮合的同时与第一左从动齿轮啮合,第一左中间过渡齿轮设于第一主动齿轮和第一左从动齿轮之间,第二左中间过渡齿轮通过轴承与基座转动连接,第二左中间过渡齿轮与第一左从动齿轮啮合的同时与第二左从动齿轮啮合,第二左中间过渡齿轮设于第二左从动齿轮和第一左从动齿轮之间,第三左中间过渡齿轮通过轴承与基座转动连接,第三左中间过渡齿轮与第二左从动齿轮啮合的同时与第三左从动齿轮啮合;第一右鱼饵连接杆穿过基座并通过轴承与基座转动连接,第二右鱼饵连接杆穿过基座并通过轴承与基座转动连接,第三右鱼饵连接杆穿过基座并通过轴承与基座转动连接,第一右从动齿轮与第一右鱼饵连接杆的中部固定连接,第二右从动齿轮与第二右鱼饵连接杆的中部固定连接,第三右从动齿轮与第三右鱼饵连接杆的中部固定连接,第一右中间过渡齿轮通过轴承与基座转动连接,第一右中间过渡齿轮与第一主动齿轮啮合的同时与第一右从动齿轮啮合,第一右中间过渡齿轮设于第一主动齿轮和第一右从动齿轮之间,第二右中间过渡齿轮通过轴承与基座转动连接,第二右中间过渡齿轮与第一右从动齿轮啮合的同时与第二右从动齿轮啮合,第三右中间过渡齿轮通过轴承与基座转动连接,第三右中间过渡齿轮与第二右从动齿轮啮合的同时与第三右从动齿轮啮合,第三右中间过渡齿轮设于第二右从动齿轮和第三右从动齿轮之间,从动同步带轮与第一鱼饵连接杆固定连接,主动同步带轮与翻转驱动电机的输出轴连接,同步带连接于主动同步带轮和从动同步带轮之间;
10、鱼饵定位装置的基座固定连接在工作台的中部,翻转驱动电机与工作台固定连接;
11、工作台设有第一油漆引流收集通道和第二油漆引流收集通道,第一油漆引流收集通道、第二油漆引流收集通道分别位于鱼饵定位装置的两侧。
12、优选地,鱼饵定位装置还包括外壳,外壳罩在基座上。
13、优选地,执行末端还包括支撑杆和双目相机,支撑杆与执行末端的固定架固定连接,双目相机固定连接在支撑杆。
14、优选地,第二固定块连接有第二u槽型光电开关,第二伸缩架连接有第二触发板;第一固定块连接有第一u槽型光电开关,第一伸缩架连接有第一触发板。
15、本发明的有益效果是,代替人工手动喷漆作业,节省人力,大幅降低人工成本,劳动强度低,大幅提高喷漆作业效率。喷涂效果更好,实现精准喷涂。
16、本发明进一步的特征和方面,将在以下参考附图的具体实施方式的描述中,得以清楚地记载。
技术特征:
1.一种路亚鱼饵精细化喷涂机器人系统,其特征在于,包括机械臂连接支架、机械臂、执行末端、工作台和鱼饵定位装置,所述机械臂与机械臂连接支架连接,所述执行末端与机械臂的末端连接,所述鱼饵定位装置与工作台的中部连接;
2.根据权利要求1所述的路亚鱼饵精细化喷涂机器人系统,其特征在于,所述鱼饵定位装置还包括外壳,所述外壳罩在基座上。
3.根据权利要求1所述的路亚鱼饵精细化喷涂机器人系统,其特征在于,所述执行末端还包括支撑杆和双目相机,所述支撑杆与执行末端的固定架固定连接,所述双目相机固定连接在支撑杆。
4.根据权利要求1所述的路亚鱼饵精细化喷涂机器人系统,其特征在于,所述第二固定块连接有第二u槽型光电开关,所述第二伸缩架连接有第二触发板;所述第一固定块连接有第一u槽型光电开关,所述第一伸缩架连接有第一触发板。
技术总结
本发明涉及一种路亚鱼饵精细化喷涂机器人系统,其解决了现有假鱼饵生产过程中,采用人工喷涂方式进行喷漆劳动强度大、人工成本高、效率低的技术问题,其包括机械臂连接支架、机械臂、执行末端、工作台和鱼饵定位装置,鱼饵定位装置与工作台的中部连接,执行末端与机械臂的末端连接,执行末端包括固定架、第一气动油漆喷枪、第二气动油漆喷枪、第一喷枪自动开启机构和第二喷枪自动开启机构,第一喷枪自动开启机构、第二喷枪自动开启机构分别固定连接在固定架上,第一气动油漆喷枪连接定位在第一喷枪自动开启机构上,第二气动油漆喷枪连接定位在第二喷枪自动开启机构上,固定架与机械臂的末端固定连接。本发明广泛用于路亚鱼饵的喷漆上色工艺。
技术研发人员:路士州,成振,毕值源,王鹤翔,方松涛,肖珺相,张嘉乾,李欣茹,于泽璞
受保护的技术使用者:山东大学
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!