一种工业材料煅烧智能机械臂及煅烧设备的制作方法
本发明涉及化工设备,具体涉及一种工业材料煅烧智能机械臂及煅烧设备。
背景技术:
1、新材料是指在自然界或实验室中,最近几年发现或者发展起来的具有特殊性能或功能的物质或材料。这类新材料通常包括以下几个方面:先进金属材料:例如,纳米金属、高性能合金等;高分子材料:如,高性能塑料、弹性体、高分子复合材料等;无机非金属材料:如,纳米陶瓷、氧化物等;新型复合材料:如,碳纤维复合材料、玻璃纤维复合材料等;功能性或智能材料:如,自修复材料、导电纸、磁性材料等;新型能源材料:如,锂离子电池正极材料、燃料电池等。新材料的出现,极大地推动了科技的发展,为人类的生产和生活带来了许多便利和创新。比如,在交通工具领域,新型轻质金属材料的应用使得汽车更加轻便、高效;在医疗领域,生物医用材料的研发和应用使得手术效果得到提升,且对患者身体的伤害更小。
2、新材料处理过程通常分为几个步骤:原料选择和预处理:根据需要制备的新材料种类,选择相应的原材料,并对这些原材料进行必要的预处理,如粉碎、混合、清洗等。配料:将处理好的原材料按一定的比例进行配比,并加入适量的辅助剂,如催化剂、增塑剂等。混合:将配料充分混合均匀,形成所需的物料。成型:将混合好的物料进行煅烧然后成型处理,常见的成型方法有压延、挤压、注塑等。干燥:将成型后的产品进行干燥处理,去除多余的水分和其他挥发性物质,以保证产品的质量和稳定性。烧结:将经过干燥处理的产品进行烧结处理,这一步是将原材料的微观结构改变,从而使材料获得所需的功能和性能。后处理:对烧结后的产品进行后处理,如磨粉、表面处理等,以满足使用要求。需要注意的是,不同的材料和产品可能需要不同的煅烧工艺和条件,因此,在实际生产过程中,需要根据具体情况进行调整和优化。
3、在进行新材料煅烧时,我们一般使用煅烧池进行煅烧,新材料煅烧过程中会发生结块现象,需要人工采用钢钎不停的进行破碎,往往需要4-5个人配合工作,由于是高温环境,工作环境差,劳动强度大,且存在危险性。
技术实现思路
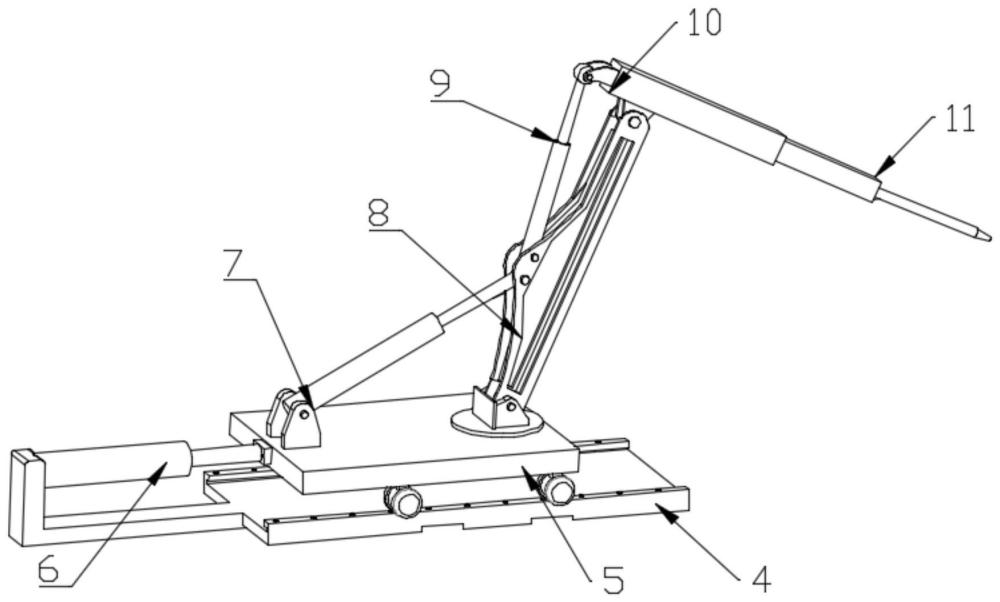
1、为解决上述技术问题,本发明提供一种工业材料煅烧智能机械臂,用于对材料煅烧结块进行破碎和挑起,从而便于新材料的煅烧和转运,所述的工业材料煅烧智能机械臂包括:
2、基座,用于滑动安装在机械臂轨道上,并形成安装支撑,所述的基座可以是矩形的板状结构、方形板结构或者其他形状,保证基座的上表面平整,其中以水平为宜。由于需要配合形成轨道,所以基座的形状以矩形为宜,由于配合工艺需求,所述的基座的中心线可以指向机械臂轨道的中心点设置。
3、基座驱动结构,可以安装在基座上,用于驱动基座在机械臂轨道上滑动。所述的基座驱动结构可以安装在基座的底部,从而可以减少安装空间的占用,还能增加工业材料煅烧智能机械臂美观。所述的基座驱动结构可以通过链条拉动,还可以通过电机和驱动轮组合进行驱动。当所述的基座驱动结构为电机和驱动轮组合时,所述的电机可以安装在基座的底部,电机的输出轴同轴固定连接在驱动轮的中心位置,驱动轮与机械臂轨道所在地平或者机械臂轨道侧面接触,其中以齿轮啮合为宜。
4、给进座,滑动放置在基座上,并形成安装支撑的载体,给进座的滑动路线指向基座运动轨迹的圆心上。具体的给进座的底部可以设置有滚动轮,基座的上表面设置有滚动轨道,且滚动轨道与滚动轮吻合,所述的滚动轮放置在滚动轨道上,滚动轮在滚动轨道上滚动,从而减少给进座与基座之间的摩擦力。
5、给进驱动结构,可以安装在基座上,并与给进座连接,给进驱动结构用于驱动给进座在基座上滑动,使给进座的滑动方向始终在基座移动轨迹的圆形经线上。
6、第一转动臂,其一端转动连接在给进座上,第一转动臂转动所在平面可以与地平垂直,当然垂直只是一个最佳方式,并不能代表第一转动臂转动平面其他角度方式设置,第一转动臂可以是钢构架结构或者其他的刚性材质制成,保证其具有一定的刚性,从而使其形成支撑骨架。
7、第二转动臂,转动连接在第一转动臂的另一端,其转动平面可以和第一转动臂的转动平面吻合,第一转动臂和第二转动臂配合,可以形成类似人手臂的结构,相互配合进行作业。
8、第二转动臂驱动结构安装在第一转动臂上,用于驱动第二转动臂围绕着其转动连接点转动。
9、伸缩驱动钎杆,安装在连接在第二转动臂上,用于对煅烧结块的材料进行破碎,所述的伸缩驱动钎杆的非连接端可以设置为尖端,从而减少受力面积,便于对结块的材料进行破碎。所述的伸缩驱动钎杆需要用耐高温材料制成,避免伸缩驱动钎杆在作业过程中受损。
10、控制器,与基座驱动结构、给进驱动结构、第一转动臂驱动结构、第二转动臂驱动结构和伸缩驱动结构信号连接,可以是有线或者无线连接,控制器用于控制工业材料煅烧智能机械臂圆周移动、给进座的移动给进、第一转动臂和第二转动臂的转动以及伸缩驱动钎杆的伸缩。控制器一键破碎设置,一键破碎不包括基座和给进座的移动,基座和给进座的移动需要手动操作。通过控制器控制基座驱动结构驱动工业材料煅烧智能机械臂移动到需要破碎的圆周位置,然后通过给进驱动结构控制给进座到指定径向位置。所述一键破碎控制方法包括:获得操作深度h;计算获得伸缩驱动钎杆的调节长度l,控制器控制伸缩驱动钎杆长度为l。控制器控制第二转动臂驱动结构使第一转动臂与第二转动臂之间的夹角为δ,然后控制器控制第一转动臂驱动结构使伸缩驱动钎杆向下移动,伸缩驱动钎杆与材料的摊铺平面接触并进行破碎,当伸缩驱动钎杆对材料的破碎后,控制器控制第二转动臂驱动结构使第二转动臂与第一转动臂之间的角度增大。第二转动臂到第一转动臂转动到预设的角度a时停止转动,控制器控制第二转动臂驱动结构使第二转动臂与第一转动臂之间角度增大到一个预设的角度b进行挑料,从而使伸缩驱动钎杆向上挑起,以此完成煅烧材料的破碎与向煅烧池内部排料区域的翻动。
11、优选的:基座的底部可以开设有与机械臂轨道配合的轨道槽状结构,将基座放置在机械臂轨道上时,机械臂轨道可以配合的嵌套在轨道槽状结构的内部,轨道槽状结构的内部可以设置有滚动轮,滚动轮用于放置在机械臂轨道上,从而减少基座与机械臂轨道之间的摩擦力,使基座的滑动更加顺畅。
12、优选的:基座和给进座之间可以设置有滑动稳定结构,滑动稳定结构用于增加给进座滑动的稳定性,所述的滑动稳定结构可以包括导向杆和直线轴承,基座上可以固定设置有至少一个导向杆,导向杆设置方向与给进座的滑动方向一致,给进座的底部固定设置有直线轴承,直线轴承与导向杆的数量和位置对应,直线轴承滑动嵌套在导向杆上,从而对给进座的滑动进行导向,同时还可以避免给进座受力翻倒。
13、优选的:所述的伸缩驱动钎杆可以是伸缩驱动结构和钎杆组成,钎杆一端滑动嵌套在第二转动臂的内部,钎杆的另一端为工作端且伸出第二转动臂,伸缩驱动结构安装在第二转动臂的内部,伸缩驱动结构用于驱动钎杆滑动。所述伸缩驱动结构液压驱动杆、电动伸缩杆,所述的给进驱动结构、第一转动臂驱动结构、第二转动臂驱动结构和伸缩驱动结构可以统一设置为液压驱动杆,从而便于运行和管理,并节约成本,在进行运作时,可以通过编号进行控制,具体在此不做赘述。
14、优选的:所述的操作深度h=h-h1+h2,其中h1为工业材料煅烧智能机械臂的作业平面高度,即煅烧池内部材料的堆积高度,我们可以通过检测或者目测获得,然后通过人工或者电信号导入获得。h2为第一转动臂的安装平面高度,当第一转动臂为直线时,可以是给进座的上表面高度。h为煅烧池的总深度,可以通过系统输入或者设备参数收集获得。
15、优选的:所述的伸缩驱动钎杆的调节长度l=h-l0+α,其中l0为第二转动臂的长度和伸缩驱动钎杆的基础长度之和,ɑ为破碎插钎深度,其数值与结块厚度有关,可以固定数值,因为一般为特定材料煅烧,一般其数值为0.1-0.5m。
16、优选的:所述的破碎插钎深度可以根据材料性质和煅烧深度而定,破碎插钎深度ɑ的具体计算方法为α=h'+h”,其中,h’为进料的摊铺厚度,与进料流量有关,可以通过经验获得,当然还可以通过计算获得,h”为破碎后材料结块的平均厚度,一般为固定值,数值在0.1-0.3m之间,具体在此不做赘述。
17、优选的:所述的第二转动臂与第一转动臂之间的角度增大的速度其中,ω2为第一转动臂的实时转动角速度,可以通过第二转动臂驱动结构的伸缩速度计算获得。
18、优选的:具体的可以为进料的摊铺厚度其中q为单位时间内的进料流量,可以通过进料流量获得,ε为摊铺有效面积比例因子,在煅烧池的表面积并不是所有的表面都在摊铺材料,基本上是煅烧池的外部摊铺面积占总体面积的比例,具体可以是其中r为非摊铺面积的半径,可以根据煅烧池的设备参数获得,r为煅烧池的上表面半径,均可以根据设备参数获得,具体在此不做赘述。n为单位时间内的破碎次数,一般我们在进行材料煅烧时,通过周向围绕着煅烧池转动,从而一边进料煅烧,一边进行破碎,实现连续作业,
19、优选的:控制器控制第二转动臂驱动结构使第一转动臂与第二转动臂之间的夹角为其中,s为第一转动臂的有效长度,第一转动臂与第二转动臂连接处的第一转动臂端部所在直线延长线与给进座所在平面的交点定义为有效交点,有效交点到第一转动臂与第二转动臂转动连接点之间的连线长度定义为第一转动臂的有效长度s。
20、本发明还提出一种工业材料智能煅烧设备,所述的工业材料智能煅烧设备包括:
21、煅烧池,用于对进料的材料进行煅烧和排料,所述的煅烧池可以是倒置的圆台或者圆柱凹槽结构,其配套设置有加热装置、进料装置、排料装置、排烟装置等等,加热装置用于对材料进行煅烧,进料装置可以通过管道进料,排料装置可以设置在煅烧池的中心位置,其覆盖和延伸半径为上述所述的非摊铺面积的半径r,排烟装置可以在煅烧池的上方,煅烧池上可以设置有带有开门的保温罩。
22、机械臂轨道,固定安装在煅烧池的外围,可以与煅烧池上表面同心设置,机械臂轨道可以是双轨道设置,即两个轨道处于同一平面上,且为同心圆;以及
23、上述所述的工业材料煅烧智能机械臂,放置在机械臂轨道上,并围绕着煅烧池圆周转动,用于对煅烧池内部煅烧的材料结块进行破碎和转移。
24、本发明的技术效果和优点:本发明可以通过工业材料煅烧智能机械臂对煅烧材料结块进行破碎,避免了多人工操作,提高了工作效率,且避免了人为操作的危险。可以时刻保持伸缩驱动钎杆与结块的材料以最节省力的方式插入,避免了伸缩驱动钎杆因为偏转力造成的设备损伤,同时增加有效力的运用,可以最快的对结块的煅烧材料进行破碎,提高工作效率。通过半自动控制可以实现一键破碎和挑料,避免第一转动臂、第二转动臂和伸缩驱动钎杆分别操作,并且能以最佳的方式进行破碎,提高破碎的效率,保护设备且避免繁琐操作。
- 还没有人留言评论。精彩留言会获得点赞!