一种喷涂机器人结构的制作方法
本技术涉及喷涂机器人,具体为一种喷涂机器人结构。
背景技术:
1、市面上的喷涂机器人分为有气喷涂机器人和无气喷涂机器人两种。有气喷涂机器人也称低压有气喷涂,喷涂机依靠低压空气使油漆在喷出枪口后形成雾化气流作用于物体表面(墙面或木器面),有气喷涂相对于手刷而言无刷痕,而且平面相对均匀,单位工作时间短,可有效地缩短工期。但有气喷涂有飞溅现象,存在漆料浪费,在近距离查看时,可见极细微的颗粒状。一般有气喷涂采用装修行业通用的空气压缩机,相对而言一机多用、投资成本低,市面上也有抽气式有气喷涂机、自落式有气喷涂机等专用机械。
2、但是目前现有喷涂机器人存在一定的缺陷,传统喷涂机器人只能采用一种喷涂液,共用一个油漆桶,导致喷涂液混杂,降低喷涂效果,同时,传统喷涂多采用普通喷雾机进行喷洒,喷洒出来的喷涂液剂,颗粒大,使得雾化喷涂液弥散范围小,且一经喷出,就会迅速落地,无法长时间悬停在半空,喷涂液剂时效端,导致喷涂时间较短,使得喷涂效果不够理想,因此需要一种一种喷涂机器人结构来解决背景技术中存在的问题。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种喷涂机器人结构,具备喷涂效果好,喷涂范围大等优点。
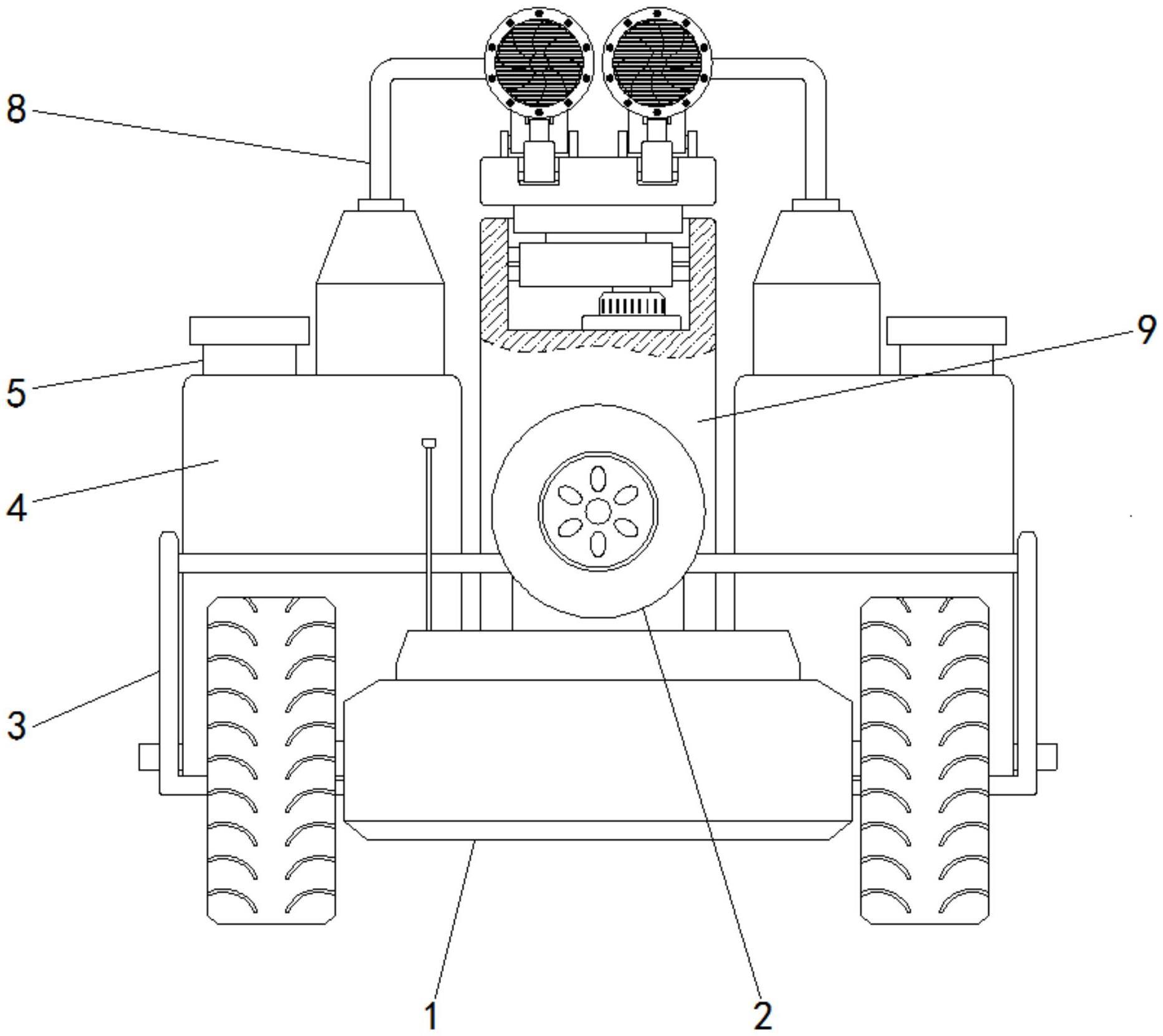
2、为实现上述喷涂效果好,喷涂范围大的目的,本实用新型提供如下技术方案:一种喷涂机器人结构,包括行走机器人,在行走机器人顶部设有监控器,所述行走机器人中部的两侧均设有安装架,所述安装架内安置有喷涂液箱,所述喷涂液箱内设有雾化机构,所述行走机器人中部的顶部设有立柱,所述立柱顶端设有转向机构,所述转向机构上设有与雾化机构连接的风炮;
3、所述雾化机构包括两个固定安装在喷涂液箱内底壁的立杆,所述立杆的表面滑装有滑套,两个所述滑套之间设有漂浮圈,所述漂浮圈内壁设有雾化器,所述喷涂液箱顶部设有聚气筒,所述聚气筒内壁设有风机。
4、进一步,所述立柱为圆柱体,立柱顶端开设有顶槽,转向机构的一部分设置在顶槽内部。
5、进一步,所述转向机构包括安装在顶槽内底壁的电机,顶槽内侧壁设有与电机对接的减速箱,减速箱输出端设有转向柱,转向柱顶端设有基板。
6、进一步,所述转向柱延伸至立柱的顶部并与立柱转动连接,基板为矩形板,基板的顶部通过立座转动安装有与风炮连接的后置活动座。
7、进一步,所述基板的顶部且位于后置活动座的正面开设有基槽,基槽内部转动安装有与风炮转动连接的电动伸缩杆,风炮设置有两个,且两个所述风炮并列设置。
8、进一步,所述行走机器人为遥控智能机器人,行走机器人底部设有驱动轮,行走机器人顶部设有接收天线。
9、进一步,所述喷涂液箱顶部且位于聚气筒的边侧固定安装有补充管,补充管表面螺纹安装有拧盖,喷涂液箱远离行走机器人一侧的底端固定安装有排放管,排放管表面装有阀门。
10、进一步,所述雾化器为超声波陶瓷雾化器,立杆顶部固定安装有限位块,聚气筒顶部螺纹安装有输气管,输气管另一端与风炮活动连接。
11、与现有技术相比,本实用新型提供了一种喷涂机器人结构,具备以下有益效果:
12、该喷液喷涂机器人利用超声波陶瓷雾化器将喷涂液剂迅速雾化,然后通过风炮进一步将喷涂液雾散布到外界,以喷涂液雾的形式代替传统喷洒机构,可让喷涂液剂长时间悬停在半空,增长了喷涂液剂的时效,从而有效的提升了喷涂效果,电机和电动伸缩杆可让风炮360度旋转并喷射角度随意改变,扩大了喷涂液雾的笼罩范围,而且采用风炮让喷涂液雾分布范围进一步扩张,在同等喷涂液剂下,喷涂范围得到了提升,最后,可选择不同的喷涂液分别投入不同的喷涂液箱中,避免了多种喷涂液共有一个喷涂液箱,导致喷涂液混杂,降低喷涂效果的问题,而且通过设置两个风炮和两个雾化机构,可同时通过两个风炮进行喷洒喷涂液,提高喷洒效率的同时,两种喷涂液也不会混杂,从而保证了喷涂效果。
技术特征:
1.一种喷涂机器人结构,包括行走机器人(1),在行走机器人(1)顶部设有监控器(2),其特征在于:所述行走机器人(1)中部的两侧均设有安装架(3),所述安装架(3)内安置有喷涂液箱(4),所述喷涂液箱(4)内设有雾化机构(7),所述行走机器人(1)中部的顶部设有立柱(9),所述立柱(9)顶端设有转向机构(11),所述转向机构(11)上设有与雾化机构(7)连接的风炮(13);
2.根据权利要求1所述的一种喷涂机器人结构,其特征在于:所述立柱(9)为圆柱体,立柱(9)顶端开设有顶槽(10),转向机构(11)的一部分设置在顶槽(10)内部。
3.根据权利要求2所述的一种喷涂机器人结构,其特征在于:所述转向机构(11)包括安装在顶槽(10)内底壁的电机(111),顶槽(10)内侧壁设有与电机(111)对接的减速箱(112),减速箱(112)输出端设有转向柱(113),转向柱(113)顶端设有基板(114)。
4.根据权利要求3所述的一种喷涂机器人结构,其特征在于:所述转向柱(113)延伸至立柱(9)的顶部并与立柱(9)转动连接,基板(114)为矩形板,基板(114)的顶部通过立座转动安装有与风炮(13)连接的后置活动座(12)。
5.根据权利要求4所述的一种喷涂机器人结构,其特征在于:所述基板(114)的顶部且位于后置活动座(12)的正面开设有基槽,基槽内部转动安装有与风炮(13)转动连接的电动伸缩杆(14),风炮(13)设置有两个,且两个所述风炮(13)并列设置。
6.根据权利要求1所述的一种喷涂机器人结构,其特征在于:所述行走机器人(1)为遥控智能机器人,行走机器人(1)底部设有驱动轮,行走机器人(1)顶部设有接收天线。
7.根据权利要求1所述的一种喷涂机器人结构,其特征在于:所述喷涂液箱(4)顶部且位于聚气筒(75)的边侧固定安装有补充管(5),补充管(5)表面螺纹安装有拧盖,喷涂液箱(4)远离行走机器人(1)一侧的底端固定安装有排放管(6),排放管(6)表面装有阀门。
8.根据权利要求1所述的一种喷涂机器人结构,其特征在于:所述雾化器(74)为超声波陶瓷雾化器,立杆(71)顶部固定安装有限位块,聚气筒(75)顶部螺纹安装有输气管(8),输气管(8)另一端与风炮(13)活动连接。
技术总结
本技术涉及一种喷涂机器人结构,包括行走机器人,在行走机器人顶部设有监控器,行走机器人中部的两侧均设有安装架,安装架内安置有喷涂液箱,喷涂液箱内设有雾化机构,行走机器人中部的顶部设有立柱,立柱顶端设有转向机构。该喷液喷涂机器人及喷涂机器人的,利用超声波陶瓷雾化器将喷涂液剂迅速雾化,然后通过风炮进一步将喷涂液雾散布到外界,以喷涂液雾的形式代替传统喷洒机构,可让喷涂液剂长时间悬停在半空,增长了喷涂液剂的时效,从而有效的提升了喷涂效果,电机和电动伸缩杆可让风炮360度旋转并喷射角度随意改变,扩大了喷涂液雾的笼罩范围,而且采用风炮让喷涂液雾分布范围进一步扩张,在同等喷涂液剂下,喷涂范围得到了提升。
技术研发人员:黄睿,黄生科
受保护的技术使用者:江苏睿科大器机器人有限公司
技术研发日:20230410
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!