一种自动喷塑机器人的制作方法
本发明属于工业喷塑机器人,具体是指一种自动喷塑机器人。
背景技术:
1、在对球形工业制品进行喷塑时,一般由工人手持喷塑枪环绕一周对球形工业制品进行喷塑,但是喷塑过程中喷塑粉末会大量扩散在周围空气中,工人极易吸入,严重危害了工人的生命安全,而且目前一般使用静电喷塑工艺,导致喷塑粉末本身携带静电,更容易对工人的身体造成损害;同时由于球形工业制品本身固定困难,喷塑过程中对球形工业制品的底部进行喷塑时,需要将球形工业制品提升至一定的高度,工人需要靠近球形工业制品,保持仰视的姿势对工业制品进行喷塑,这就导致喷塑粉末更容易被人体吸入,因此急需一种自动喷塑机器人替代工人进行喷塑,来解决上述问题。
技术实现思路
1、针对上述情况,为克服现有技术的缺陷,本发明提出了一种自动喷塑机器人,解决了球形工业制品喷塑过程中容易对工人的身体造成损害、球形工业制品本身固定困难、喷塑粉末容易被人体吸入的各种问题。
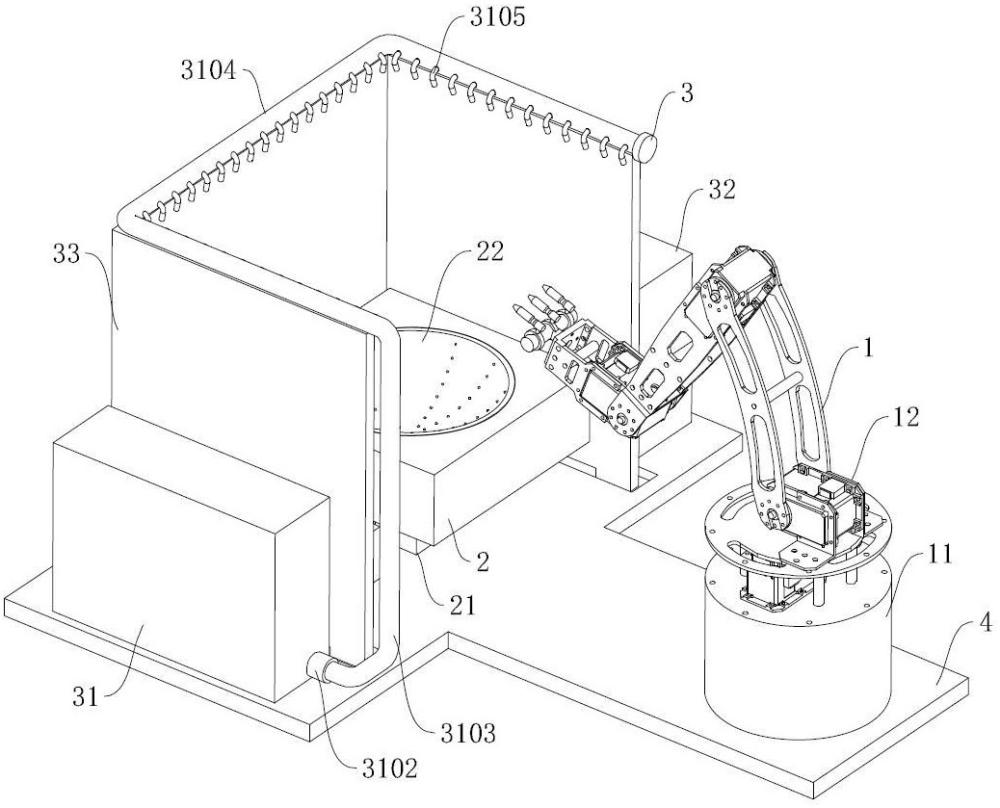
2、本发明采取的技术方案如下:本发明提出了一种自动喷塑机器人,包括t形底板,还包括自动喷塑组件,自动喷塑组件安装在t形底板上,自动喷塑组件包括底部调节装置和喷塑装置,喷塑装置安装在底部调节装置的顶部;支撑摆动组件,支撑摆动组件设于自动喷塑组件的一侧,支撑摆动组件包括摆动装置和支撑装置,摆动装置设于t形底板上,支撑装置安装在摆动装置上;水幕拦截组件,水幕拦截组件环绕于支撑摆动组件设置,水幕拦截组件包括供液装置、回收装置和u形拦截板,u形拦截板环绕于支撑装置设置,供液装置和回收装置设于u形拦截板的两侧,t形底板上转动设有支撑转轴。
3、作为本发明的一种优选技术方案,底部调节装置包括底座、限位立柱、滚珠安装座、限位滚珠、安装底盘、限位滑槽、连接轴和调节电机,底座设于t形底板上,限位立柱固定连接设于底座上,限位立柱呈圆周阵列布置,滚珠安装座设于限位立柱的顶壁上,限位滚珠滚动连接设于滚珠安装座上,调节电机设于底座上,连接轴与调节电机保持转动连接,连接轴的顶端与安装底盘的底壁保持固定连接,限位滑槽设于安装底盘的底壁上,限位滚珠与限位滑槽之间保持滚动连接。
4、作为本发明的一种优选技术方案,喷塑装置包括第一电机、第一安装侧板、第一曲臂、第二电机、第二安装侧板、第二曲臂、第三电机、第三安装侧板、第三曲臂和静电喷枪,第一安装侧板固定连接设于安装底盘上,第一安装侧板设有两组,第一电机设于第一安装侧板上,第一曲臂的底部与第一安装侧板和第一电机保持转动连接,第一曲臂的顶部与第二安装侧板和第二电机保持转动连接,第二电机和第二曲臂安装在第二安装侧板上,第二曲臂的一端与第三电机和第三安装侧板保持转动连接,第三电机和第三曲臂安装在第三安装侧板上,静电喷枪安装在第三曲臂的一端。
5、作为本发明的一种优选技术方案,摆动装置包括底部立板、摆动电机、驱动弧形板、驱动滚珠、弓形板、滚珠滑槽和安装块,支撑转轴穿过安装块,支撑转轴与安装块之间保持固定连接,底部立板设于支撑转轴的一侧,摆动电机设于底部立板的侧壁上,驱动弧形板与摆动电机保持转动连接,驱动滚珠滚动连接设于驱动弧形板的内环上,弓形板设于安装块的侧壁上,滚珠滑槽设于弓形板的外环上,驱动滚珠与滚珠滑槽保持滚动连接。
6、作为本发明的一种优选技术方案,支撑装置包括支撑仓、支撑球座、降阻滚珠、开口、驱动滚轮、滚轮转轴、转轴安装板和驱动电机,支撑仓固定连接设于支撑转轴上,支撑球座安装在支撑仓的顶壁上,降阻滚珠滚动连接设于支撑球座上,转轴安装板设于支撑仓的底部内壁上,滚轮转轴的两端与转轴安装板保持转动连接,驱动电机安装在转轴安装板上,滚轮转轴与驱动电机保持转动连接,驱动滚轮安装在滚轮转轴上,驱动滚轮穿过开口,开口贯穿支撑球座的壳体。
7、作为本发明的一种优选技术方案,供液装置包括供液箱、供液泵、供液弯管、u形管、出水管和阻塞件,供液箱设于u形拦截板的一侧,供液泵设于供液箱的侧壁上,供液弯管的一端与供液泵连接,供液弯管的另一端与u形管连接,u形管安装在u形拦截板的顶壁上,出水管设于u形管上,出水管呈阵列布置,出水管的一端朝向u形拦截板的内侧侧壁,阻塞件设于u形管的一端。
8、作为本发明的一种优选技术方案,回收装置包括回收箱、回收泵和回收弯管,回收箱设于u形拦截板的一侧,回收泵设于回收箱上,回收泵的一端与回收箱的顶壁连接,回收泵的另一端与回收弯管连接。
9、作为本发明的一种优选技术方案,t形底板上设有集水槽,集水槽位于u形拦截板的正下方,u形拦截板的底部侧壁上设有出水口。
10、作为本发明的一种优选技术方案,回收弯管的一端伸入集水槽内。
11、作为本发明的一种优选技术方案,转轴安装板设有两组。
12、优选地,底座上设有中央控制器,辅助实现自动喷塑等功能,中央控制器型号为at89c51。
13、本发明提出的一种自动喷塑机器人的有益效果如下:
14、(1)调节电机带动连接轴转动时,安装底盘会跟随连接轴一同转动,从而可以转动静电喷枪,提高静电喷枪的喷塑范围。
15、(2)通过第一电机、第二电机和第三电机可以控制曲臂的弯曲角度,方便调整静电喷枪的喷塑高度和喷塑角度。
16、(3)限位立柱上的限位滚珠,不仅可以起到支撑安装底盘的作用,而且可以降低安装底盘转动时的摩擦力。
17、(4)摆动电机带动驱动弧形板转动时,驱动滚珠会在滚珠滑槽内上下往复滚动,并带动支撑转轴和上方的支撑球座左右往复摆动,从而在不需要任何传感器的情况下,带动支撑球座上的球形工业制品左右往复摆动,极大增加了的喷塑范围,有利于对工业制品进行均匀喷塑。
18、(5)驱动电机带动驱动滚轮转动时,驱动滚轮可以带动支撑球座上的球形工业制品滚动,从而将球形工业制品后部和底部的未喷塑区域暴露出来,实现对球形工业制品的全面喷塑,同时球形工业制品滚动过程中,支撑球座上的降阻滚珠可以减小球形工业制品与支撑球座之间的摩擦力。
19、(6)出水管中流出的水拍打在u形拦截板上后,可以在u形拦截板上形成水幕,对喷塑过程中扩散到空气中的喷塑粉末进行拦截捕捉,并且水流还可以消除掉喷塑粉末上携带的静电。
20、(7)回收泵可以将集水槽内的污水收集至回收箱中,防止集水槽内的污水漫出。
技术特征:
1.一种自动喷塑机器人,包括t形底板(4),其特征在于:还包括,
2.根据权利要求1所述的一种自动喷塑机器人,其特征在于:所述底部调节装置(11)包括底座(1101)、限位立柱(1102)、滚珠安装座(1103)、限位滚珠(1104)、安装底盘(1105)、限位滑槽(1106)、连接轴(1107)和调节电机(1108),所述底座(1101)设于t形底板(4)上,所述限位立柱(1102)固定连接设于底座(1101)上,所述限位立柱(1102)呈圆周阵列布置,所述滚珠安装座(1103)设于限位立柱(1102)的顶壁上,所述限位滚珠(1104)滚动连接设于滚珠安装座(1103)上,所述调节电机(1108)设于底座(1101)上,所述连接轴(1107)与调节电机(1108)保持转动连接,所述连接轴(1107)的顶端与安装底盘(1105)的底壁保持固定连接,所述限位滑槽(1106)设于安装底盘(1105)的底壁上,所述限位滚珠(1104)与限位滑槽(1106)之间保持滚动连接。
3.根据权利要求2所述的一种自动喷塑机器人,其特征在于:所述摆动装置(21)包括底部立板(2101)、摆动电机(2102)、驱动弧形板(2103)、驱动滚珠(2104)、弓形板(2105)、滚珠滑槽(2106)和安装块(2107),所述支撑转轴(2108)穿过安装块(2107),所述支撑转轴(2108)与安装块(2107)之间保持固定连接,所述底部立板(2101)设于支撑转轴(2108)的一侧,所述摆动电机(2102)设于底部立板(2101)的侧壁上,所述驱动弧形板(2103)与摆动电机(2102)保持转动连接,所述驱动滚珠(2104)滚动连接设于驱动弧形板(2103)的内环上,所述弓形板(2105)设于安装块(2107)的侧壁上,所述滚珠滑槽(2106)设于弓形板(2105)的外环上,所述驱动滚珠(2104)与滚珠滑槽(2106)保持滚动连接。
4.根据权利要求3所述的一种自动喷塑机器人,其特征在于:所述供液装置(31)包括供液箱(3101)、供液泵(3102)、供液弯管(3103)、u形管(3104)、出水管(3105)和阻塞件(3106),所述供液箱(3101)设于u形拦截板(33)的一侧,所述供液泵(3102)设于供液箱(3101)的侧壁上,所述供液弯管(3103)的一端与供液泵(3102)连接,所述供液弯管(3103)的另一端与u形管(3104)连接,所述u形管(3104)安装在u形拦截板(33)的顶壁上,所述出水管(3105)设于u形管(3104)上,所述出水管(3105)呈阵列布置,所述出水管(3105)的一端朝向u形拦截板(33)的内侧侧壁,所述阻塞件(3106)设于u形管(3104)的一端。
5.根据权利要求4所述的一种自动喷塑机器人,其特征在于:所述回收装置(32)包括回收箱(3201)、回收泵(3202)和回收弯管(3203),所述回收箱(3201)设于u形拦截板(33)的一侧,所述回收泵(3202)设于回收箱(3201)上,所述回收泵(3202)的一端与回收箱(3201)的顶壁连接,所述回收泵(3202)的另一端与回收弯管(3203)连接。
6.根据权利要求5所述的一种自动喷塑机器人,其特征在于:所述t形底板(4)上设有集水槽(5),所述集水槽(5)位于u形拦截板(33)的正下方,所述u形拦截板(33)的底部侧壁上设有出水口(6)。
7.根据权利要求6所述的一种自动喷塑机器人,其特征在于:所述回收弯管(3203)的一端伸入集水槽(5)内。
8.根据权利要求7所述的一种自动喷塑机器人,其特征在于:所述转轴安装板(2207)设有两组。
9.根据权利要求8所述的一种自动喷塑机器人,其特征在于:所述第一安装侧板(1202)固定连接设于安装底盘(1105)上。
技术总结
本发明公开了一种自动喷塑机器人,包括T形底板、自动喷塑组件、支撑摆动组件和水幕拦截组件。本发明属于工业喷塑机器人技术领域,通过中央控制器启动第一电机、第二电机和第三电机,来调整第一曲臂、第二曲臂和第三曲臂的弯曲角度,以此来调整静电喷枪的位置,实现本喷塑机器人的调节功能,摆动电机带动驱动弧形板转动时,驱动滚珠会在滚珠滑槽内上下往复滚动,并带动支撑转轴和上方的支撑球座左右往复摆动,带动支撑球座上的球形工业制品左右往复摆动,极大增加了的喷塑范围,有利于对工业制品进行均匀喷塑,驱动滚轮可以带动支撑球座上的球形工业制品滚动,将球形工业制品后部和底部的未喷塑区域暴露出来,实现对球形工业制品的全面喷塑。
技术研发人员:王国香
受保护的技术使用者:江苏神舟灯饰有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!