一种基于视觉测量的连接器分拣装配系统的制作方法
1.本发明涉及上料装配技术领域,具体涉及一种基于视觉测量的连接器分拣装配系统。
背景技术:
2.现在电子产品组装过程中,需要很多重复单一的动作,使用人工作业来进行这些重复单一的动作,不仅劳动强度较大,效率低,且装配质量一致性差,例如目前雷达组件连接器的装配还是由人工完成,而不同的连接器的尺寸和待装配壳体上不同孔的直径均存在一定差异,人工在装配过程存在试装的过程,导致装配效率低、精度低,装配质量和一致性差,进一步的严重影响了产品生产效率。因此,提出一种基于视觉测量的连接器分拣装配系统。
技术实现要素:
3.本发明所要解决的技术问题在于:如何解决现有雷达组件连接器在装配过程中存在的装配效率低、精度低、装配质量和一致性差的问题,提供了一种基于视觉测量的连接器分拣装配系统。
4.本发明是通过以下技术方案解决上述技术问题的,本发明包括机器人本体、装配控制组件、缓冲组件、移动组件、末端治具、测量组件、翻转组件、上料组件;所述末端治具与机器人本体连接,所述移动组件与所述翻转组件连接,通过所述缓冲组件承放与当前装配过程中的工件不匹配的连接器,通过所述测量组件分别测量工件上连接器安装孔的内径与待装配连接器的直径,通过所述上料组件存放待装配连接器;所述机器人本体、所述移动组件、所述末端治具、所述测量组件、所述翻转组件均与所述装配控制组件电连接,由所述装配控制组件控制动作。
5.更进一步地,所述移动组件包括移动电机、支撑台、垫板、第一导轨、第一滑块、丝杠、移动螺母,所述垫板设置在所述支撑台上,所述移动电机设置在所述垫板上,与所述丝杠连接,所述移动螺母套设置所述丝杠上,所述第一导轨、所述第一滑块的数量均至少为两个,两个所述第一导轨平行设置在所述垫板上,所述第一滑块与所述第一导轨滑动连接。
6.更进一步地,所述末端治具包括用于夹持待装配连接器的气动夹爪、治具支撑板、治具电机、用于取放工件的取放夹板、夹板尺寸调节模块,所述治具支撑板与所述机器人本体连接,所述治具电机设置在所述治具支撑板上,所述取放夹板与所述夹板尺寸调节模块上,所述气动夹爪与所述取放夹板连接。
7.更进一步地,所述夹板尺寸调节模块包括齿条、齿轮、转动轴,所述齿条的数量为四个,两个为一组,所述齿轮的数量为两个,所述转动轴的数量为两个,所述转动轴均与所述治具支撑板转动连接,所述齿轮设置在所述转动轴上,一组中两个所述齿条分别设置所述齿轮的两侧,与所述齿轮啮合传动,所述齿条与所述治具支撑板滑动连接,所述取放夹板分别设置各所述齿条的端部,其中一个所述转动轴与所述治具电机的转轴连接。
8.更进一步地,两个所述转动轴上均设置有带轮,两个所述带轮之间通过同步带转动连接。
9.更进一步地,所述末端治具还包括第一光源、第一相机,所述第一光源、所述第一相机均与所述治具支撑板连接。
10.更进一步地,所述测量组件的数量为两套,每套所述测量组件均包括固定支架、第二相机、第二光源,所述第二相机、所述第二光源均与所述固定支架连接,其中一个所述第二相机位于所述移动组件的上方,另一个所述第二相机位于所述上料组件的上方。
11.更进一步地,所述翻转组件包括底部支撑板、翻转电机、旋转导轨支架、旋转支撑板,所述底部支撑板同时与所述移动螺母、所述第一滑块连接,所述翻转电机设置在所述底部支撑板上,所述旋转导轨支架设置在所述底部支撑板的两端,所述旋转支撑板与所述底部支撑板转动连接,并与所述旋转导轨支架滑动连接,还与所述翻转电机的转轴连接。
12.更进一步地,所述翻转电机的转轴与所述旋转支撑板之间设置有摆杆,所述摆杆与所述旋转支撑板设置有滚轴,远离所述翻转电机的所述滚轴贯穿所述旋转导轨支架上设置的弧形槽与所述旋转支撑板连接,所述摆杆通过所述滚轴与所述旋转支撑板连接,所述摆杆与所述翻转电机的转轴连接。
13.更进一步地,所述翻转组件还包括工件夹持模块,所述工件夹持模块的数量为两组,分别设置在工件两端,与所述旋转支撑板连接,所述工件夹持模块包括气动单元、随动连接板、气动夹板,所述气动夹板设置在所述气动单元上,所述气动单元通过所述随动连接板与所述旋转支撑板连接。
14.更进一步地,所述上料组件包括上料台、工装盘,所述工装盘设置所述上料台上。
15.更进一步地,所述机器人本体、所述移动电机、所述气动夹爪、所述治具电机、所述第一相机、所述第二相机、所述翻转电机、所述气动单元均与所述装配控制组件电连接,由所述装配控制组件控制动作。
16.本发明相比现有技术具有以下优点:该基于视觉测量的连接器分拣装配系统,与现有的技术相比,能够实现连接器装配前的尺寸分拣,提高装配效率、装配的质量和一致性;并且末端治具具有柔性夹取功能,可以兼顾大尺寸壳体和小尺寸连接器,值得被推广使用。
附图说明
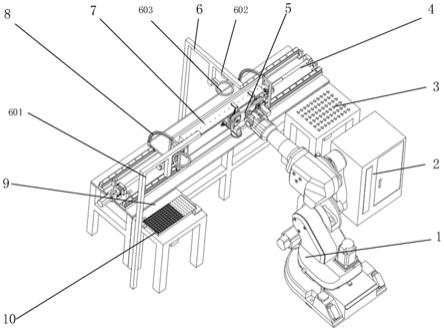
17.图1为本发明实施例二装配系统的总体结构示意图;
18.图2为本发明实施例二装配系统中缓冲组件的结构示意图;
19.图3为本发明实施例二装配系统中移动组件的结构示意图;
20.图4为本发明实施例二装配系统中末端治具的结构示意图;
21.图5为本发明实施例二装配系统中末端治具的局部结构示意图;
22.图6为本发明实施例二装配系统中翻转组件的结构示意图;
23.图7为本发明实施例二装配系统中上料组件的结构示意图;
24.图8为本发明实施例二装配系统中连接器的结构示意图。
25.图中:1、机器人本体;2、装配控制组件;3、缓冲组件;4、移动组件;5、末端治具;6、测量组件;7、工件;8、翻转组件;9、上料组件;10、连接器;301、缓冲台;302、条形码;401、支
撑台;402、垫板;403、第一导轨;404、第一滑块;405、丝杠;406、移动螺母;407、缓冲块;408、移动组件轴承座;409、移动联轴器;410、移动电机;501、气动夹爪;502、气动手指;503、齿条;504、第一光源;505、第一相机;506、相机支撑板;507、第二滑块;508、第二导轨;509、齿轮轴承座;510、连接支撑板;511、治具电机;512、治具电机支架;513、治具支撑板;514、支撑条;515、齿轮;516、转动轴;517、橡胶层;518、取放夹板;519、同步带;520、套筒;521、轴承;522、轴承端盖;523、带轮;524、治具组件联轴器;525、衬套;601、固定支架;602、第二相机;603、第二光源;801、底部支撑板;802、翻转驱动转轴;803、翻转组件联轴器;804、翻转电机;805、旋转导轨支架;806、气动单元;807、缓冲板;808、支撑块;809、托板;810、旋转支撑板;811、摆杆;812、随动连接板;813、气动夹爪;814、橡胶块;815、滚轴;816、翻转电机支架;817、铰链;901、上料台;902、上料定位角;903、工装盘。
具体实施方式
26.下面对本发明的实施例作详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
27.实施例一
28.本实施例提供一种技术方案:一种基于视觉测量的连接器分拣装配系统,包括机器人本体、装配控制组件、缓冲组件、移动组件、末端治具、测量组件、翻转组件、上料组件;
29.所述末端治具与机器人本体连接,所述移动组件与所述翻转组件连接,通过所述缓冲组件承放与当前装配过程中的工件不匹配的连接器,通过所述测量组件分别测量工件上连接器安装孔的内径与待装配连接器的直径,通过所述上料组件存放待装配连接器;
30.所述机器人本体、所述移动组件、所述末端治具、所述测量组件、所述翻转组件均与所述装配控制组件电连接,由所述装配控制组件控制动作。
31.所述移动组件包括移动电机、支撑台、垫板、第一导轨、第一滑块、丝杠、移动螺母,所述垫板设置在所述支撑台上,所述移动电机设置在所述垫板上,与所述丝杠连接,所述移动螺母套设置所述丝杠上,所述第一导轨、所述第一滑块的数量均至少为两个,两个所述第一导轨平行设置在所述垫板上,所述第一滑块与所述第一导轨滑动连接。
32.所述末端治具包括用于夹持待装配连接器的气动夹爪、治具支撑板、治具电机、用于取放工件的取放夹板、夹板尺寸调节模块,所述治具支撑板与所述机器人本体连接,所述治具电机设置在所述治具支撑板上,所述取放夹板与所述夹板尺寸调节模块上,所述气动夹爪与所述取放夹板连接。
33.所述夹板尺寸调节模块包括齿条、齿轮、转动轴,所述齿条的数量为四个,两个为一组,所述齿轮的数量为两个,所述转动轴的数量为两个,所述转动轴均与所述治具支撑板转动连接,所述齿轮设置在所述转动轴上,一组中两个所述齿条分别设置所述齿轮的两侧,与所述齿轮啮合传动,所述齿条与所述治具支撑板滑动连接,所述取放夹板分别设置各所述齿条的端部,其中一个所述转动轴与所述治具电机的转轴连接。
34.两个所述转动轴上均设置有带轮,两个所述带轮之间通过同步带转动连接。
35.所述末端治具还包括第一光源、第一相机,所述第一光源、所述第一相机均与所述治具支撑板连接。
36.所述测量组件的数量为两套,每套所述测量组件均包括固定支架、第二相机、第二光源,所述第二相机、所述第二光源均与所述固定支架连接,其中一个所述第二相机位于所述移动组件的上方,另一个所述第二相机位于所述上料组件的上方。
37.所述翻转组件包括底部支撑板、翻转电机、旋转导轨支架、旋转支撑板,所述底部支撑板同时与所述移动螺母、所述第一滑块连接,所述翻转电机设置在所述底部支撑板上,所述旋转导轨支架设置在所述底部支撑板的两端,所述旋转支撑板与所述底部支撑板转动连接,并与所述旋转导轨支架滑动连接,还与所述翻转电机的转轴连接。
38.所述翻转电机的转轴与所述旋转支撑板之间设置有摆杆,所述摆杆与所述旋转支撑板设置有滚轴,远离所述翻转电机的所述滚轴贯穿所述旋转导轨支架上设置的弧形槽与所述旋转支撑板连接,所述摆杆通过所述滚轴与所述旋转支撑板连接,所述摆杆与所述翻转电机的转轴连接。
39.所述翻转组件还包括工件夹持模块,所述工件夹持模块的数量为两组,分别设置在工件两端,与所述旋转支撑板连接,所述工件夹持模块包括气动单元、随动连接板、气动夹板,所述气动夹板设置在所述气动单元上,所述气动单元通过所述随动连接板与所述旋转支撑板连接。
40.所述上料组件包括上料台、工装盘,所述工装盘设置所述上料台上。
41.所述机器人本体、所述移动电机、所述气动夹爪、所述治具电机、所述第一相机、所述第二相机、所述翻转电机、所述气动单元均与所述装配控制组件电连接,由所述装配控制组件控制动作。
42.实施例二
43.如图1~3所示,一种基于视觉测量的连接器分拣装配系统,包括机器人本体1、装配控制组件2、缓冲组件3、移动组件4、末端治具5、测量组件6、工件7、翻转组件8、上料组件9和连接器10;所述缓冲组件3包括缓冲台301和条形码302,所述缓冲台301上面有60个孔,用来承放与当前装配过程中的工件7不匹配的连接器10,所述条形码302有60个,编号从1到60,粘贴在每个孔的一侧。所述移动组件4包括支撑台401、垫板402、第一导轨403、第一滑块404、丝杠405、移动螺母406、缓冲块407、移动组件轴承座408、移动联轴器409和移动电机410,所述支撑台401起到支撑移动组件4和翻转组件8的作用,所述垫板402的四角有四个通孔,与支撑台401相连接,所述第一导轨403有两个,均置于垫板402的上表面,平行设置,分别与垫板407的两个侧面对齐,且使用螺栓与垫板402相连接,所述第一滑块404有4个,均置于第一导轨403之上,且每条第一导轨403上有两个,所述丝杠405使用移动联轴器409与移动电机410相连接,所述移动螺母406置于丝杠405的外围,且通过螺纹与丝杠405配合,并与底部支撑板801相连接,所述缓冲块407有4个,置于丝杠405的两端,且每两个置于移动组件轴承座408的两侧,起到缓冲作用,所述移动组件轴承座408有两个,置于丝杠405的两端,且用于支撑轴承,所述移动联轴器409置于联轴器座内,起到传递扭矩的作用,所述移动电机410与联轴器座相连接。
44.如图4和图5所示,所述末端治具5包括气动夹爪501、气动手指502、齿条503、第一光源504、第一相机505、相机支撑板506、第二滑块507、第二导轨508、齿轮轴承座509、连接支撑板510、治具电机511、治具电机支架512、治具支撑板513、支撑条514、齿轮515、转动轴516、橡胶层517、取放夹板518、同步带519、套筒520、轴承521、轴承端盖522、带轮523、治具
组件联轴器524和衬套525,所述气动夹爪501一端与气动手指502中导轨上的小滑块相连接,另一端用于夹取连接器10,所述气动手指502与取放夹板518相连接,用于调节气动夹爪501的间距,所述齿条503有4个,两条组成一组,每组分别置于连接支撑板510上,每组中的每条分别置于齿轮515的两侧,与齿轮515啮合,且每条上面有4个通孔,与第二滑块507连接,所述第一光源504与第一相机505连接支架相连接,所述第一相机505置于相机支撑架506之上,所述相机支撑架506置于治具支撑板513的一侧,且与治具支撑板513相连接,支撑着第一相机505和第一光源504,所述第二滑块507有4个,分别置于4条第二导轨508之上,所述第二导轨508有4条,2条成为一组置于连接支撑板510上两侧位置,且与连接支撑板510相连接,所述齿轮轴承座509有三个,其中两个置于连接支撑板510之上,且与连接支撑板510相连接,另一个置于治具支撑板513的另一面,且置于治具支撑板513之上,与治具支撑板513相连接,所述连接支撑板510有两块,分别置于支撑条514之上,且与支撑条514相连接,支撑着齿轮515与齿条503传动,所述治具电机511置于治具电机支架512上侧,且与治具电机支架512相连接,所述治具电机支架512置于治具支撑板513上部另一面,且通过螺母固定,所述治具支撑板513置于机器人本体1的末端,且与机器人本体1相连接,所述支撑条514有两个,分别置于治具支撑板513的上下部,且与治具支撑板513相连接,起到支撑着连接支撑板510和调节治具电机511末端到治具支撑板513的距离,防止治具支撑板513的一端过高不协调,所述齿轮515有两个,分别置于转动轴516的外围,且通过键与转动轴516相连接,所述转动轴516有2个,其中一个转动轴516的端部通过治具组件联轴器524与治具电机511转轴相连接且另一端嵌在轴承521内,所述橡胶层517有4块,分别置于取放夹板518之上且与取放夹板518相连接,起到防撞作用,所述取放夹板518有4个,分别置于齿条503的端部,且与齿条503相连接,用于夹取工件,所述同步带519置于两个带轮523的外围,起到传递扭矩作用,所述套筒520置于转动轴516的外围,一端与齿轮515端面接触,另一端与轴承521的内圈接触,起到轴向定位作用,所述轴承521有2个,分别置于两个齿轮轴承座509内,所述轴承端盖522有2个,分别置于两个转动轴516的外围,且与齿轮轴承座509相连接,起到轴向定位轴承521的作用,所述带轮523有两个,分别置于转动轴516的外围,且通过键与转动轴516相连接,通过轴肩、衬套525进行轴向定位,所述治具组件联轴器524置于转动轴516和治具电机511转轴的外围,起到传递扭矩作用,所述衬套525置于转动轴516的外围,且一端与治具组件联轴器524接触,另一端与带轮523接触。
45.如图1和图6所示,所述测量组件6有两套,每一套包括固定支架601、第二相机602和第二光源603,其中一套所述固定支架601置于移动组件4的前侧,另一套置于上料组件9的前左侧,所述第二相机602固定连接在固定支架601之上,所述第二光源603固定连接在固定支架601之上且置于第二相机602的正下方。所述工件7底面置于旋转支撑板810上,两端壁被气动夹板813夹持,且侧壁上有16个孔,用来与连接器10装配;
46.所述翻转组件8由底部支撑板801、翻转驱动转轴802、翻转组件联轴器803、翻转电机804、旋转导轨支架805、气动单元806、缓冲板807、支撑块808、托板809、旋转支撑板810、摆杆811、随动连接板812、气动夹板813、橡胶块814、滚轴815、翻转电机支架816和铰链817组成,所述底部支撑板801置于移动组件4之上,且与第一滑块404相连接,起到支撑整个翻转组件8的作用,所述翻转驱动转轴802有两个,一端与摆杆811相连接,另一端通过翻转组件联轴器803与翻转电机804的转轴相连接,所述翻转组件联轴器803有两个,翻转组件联轴
器803通过键与翻转驱动转轴802、翻转电机804的转轴相连接,起到传递扭矩作用,所述翻转电机804有两个,分别置于翻转电机支架816上,所述旋转导轨支架805有两个,分别置于移动组件4的两端,且与底部支撑板801相连接,起到支撑定位作用,所述摆杆811有两个,分别置于旋转导轨支架805的外侧,与滚轴815、翻转驱动转轴802相连接,所述随动连接板812有两个,分别置于旋转支撑板810的两端,起到支撑及连接固定气动单元806的作用,所述气动夹板813有两个,分别置于气动单元806的末端,且与气动单元806末端相连接,所述滚轴815有4个,每两个置于旋转支撑板810的一端,且其中一个置于旋转导轨支架805上设置的弧形槽内,起到连接旋转支撑板810和摆杆811的作用,所述翻转电机支架816有两个,分别置于底部支撑板801的两端,且与底部支撑板801相连接,所述铰链817有两个,一端与旋转支撑板810相连接,另一端与底部支撑板801相连接。
47.如图7和图8所示,所述上料组件9由上料台901、上料定位角902和工装盘903组成,所述上料台901置于移动组件4的一端,上料定位角902有两个,分别置于上料台901的上端,斜对角布置且与上料台901相连接,对工装盘903的起到定位作用,所述工装盘903上有很多孔,用于存放连接器10。
48.需要说明的是,所述机器人本体1、所述移动电机410、所述气动夹爪501、所述治具电机511、所述第一相机505、所述第二相机602、所述翻转电机804、所述气动单元806均与所述装配控制组件2电连接,由所述装配控制组件控制动作。
49.使用时,机器人本体1转动,在末端治具5上的第一相机505作用下,末端治具5利用取放夹板518抓起传送带上的工件7(传送带放置在机械人本体1的另一侧且和移动组件4平行放置),再在第一相机505的作用下,将工件7不带孔的侧壁沿着托板809放在旋转支撑板810上。气动单元806运动,两个气动夹板813伸缩,夹紧工件7,同时对工件7起到定位作用。然后,翻转组件8整体在翻转电机804作用下沿着旋转导轨支架805发生90度转动。然后,测量组件6启动,第二相机602开始对工件7侧壁上的孔的直径进行测量,接着移动组件4启动,工件7移动,使工件7侧壁上的16个孔都能测出直径值。然后移动组件4中的移动电机410反转,使工件7往回移动工件7的长度的一半。机器人本体1带着末端治具5在第一相机505的作用下使用气动手指502和气动夹爪501对连接器10进行夹取,夹取后,末端治具5转动180度,然后在上料组件9左侧的测量组件6下进行连接器10装配部分直径的测量工作。
50.为了满足装配质量的一致性和装配精度的要求,定义连接器10与工件7孔的装配公差为s。夹取的连接器10在测出直径之后,与此时工件7上的16个孔有满足装配公差≤s的,若是16个孔中有多个孔满足,则按照从工件7的左边开始优先进行装配,若是16个孔中只有一个孔满足,则直接将测量的连接器10装到工件7的侧壁孔里,若是16个孔里没有孔满足,则末端治具5使用末端治具5上的第一相机505进行缓冲组件3中条形码302的扫描,将此连接器10放进缓冲组件3上与条形码302对应的孔里。依次类推,直到工件7上的16个孔都装好连接器10为止。然后旋转组件8旋转90度,使工件7水平放置,机器人使用末端治具5中的取放夹板518将装好后的工件7取走,放到传送带上进行下一工位。然后机器人本体1从传送带上再抓取待装配的工件7放置在旋转支撑板810上,重复第一个工件7的测量方法,将16个孔测量出来。然后机器人会优选缓冲组件3中已经测过的连接器10。针对工件7上的一个孔,若缓冲组件3有多个连接器10满足,则按照从左到右,从上到下的原则优先装配,若是只有一个,则直接夹起进行装配,若是缓冲组件3上没有满足的,则从上料组件9上夹取连接器10
进行测量,重复第一次测量装配的方法,直至工件7上的16个孔装配完为止。
51.综上所述,上述实施例的基于视觉测量的连接器分拣装配系统,与现有的技术相比,能够实现连接器装配前的尺寸分拣,提高装配效率、装配的质量和一致性;并且末端治具具有柔性夹取功能,可以兼顾大尺寸壳体和小尺寸连接器,值得被推广使用。
52.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1