一种垃圾识别和自动分选装置
1.本实用新型涉及垃圾自动识别和分类领域,具体的说是一种垃圾识别和自动分选装置。
背景技术:
2.垃圾的分类对于自然环境的保护、城市良好生活环境的建立和资源最大化利用具有重要意义。随着城市化程度的不断提高,垃圾的产生不断增加。目前的垃圾分类系统借助多种传感器来进行工作,无法有效的将不同材质的垃圾精确的分开,只能对一些具有特殊性质的垃圾来进行分类,例如废铁可以被磁选装置分开,而对大多数无特殊性质的垃圾无法区分,造成资源无法回收导致资源的浪费并对自然环境造成破坏。
技术实现要素:
3.本实用新型的目的是针对现有技术的不足,提供一种垃圾识别和自动分选装置。
4.技术方案:本实用新型解决问题所采取的技术方案为:一种垃圾识别和自动分选装置,其特征在于:包括传送带,所述传送带前端上方安装了数据采集系统,数据采集系统包括穹顶光源、高光谱相机、单线激光雷达和采集控制模块。而所述的高光谱相机和单线激光雷达连接到了工控机上,采集控制模块连接到了plc上;所述传送带后端的两侧设置了夹爪机械臂,夹爪机械臂由plc进行驱动;所述plc与工控机相连接,plc根据工控机数据处理的结果来驱动夹爪机械臂进行垃圾的分类。所述传送带由伺服电机驱动,其中伺服电机与编码器相连接,编码器与plc相连接。
5.作为优选,所述的数据采集系统包括设置在传送带前端上方中间位置处的高光谱相机和单线激光雷达、设置在高光谱相机和单线激光雷达两侧的穹顶光源以及分别设置在穹顶光源下方的毛玻璃;并且在两侧毛玻璃之间留有数据采集成像的空间。其中高光谱相机和单线激光雷达与采集控制模块相连接。
6.作为优选,所述高光谱相机可以采集垃圾流的反射高光谱图像,6nm为一谱段;所述单线激光雷达采集垃圾流相对于夹爪机械臂的高度信息。
7.作为优选,所述穹顶光源为全光谱卤素灯,包含所要采集的光谱范围,穹顶保证成像无阴影。毛玻璃避免产生镜面反射,从而影响识别结果。
8.作为优选,所述的工控机,装有采集卡与gpu,采集卡将高光谱相机采集的高光谱图像传输到工控机上,并融合单线激光雷达的高度数据,gpu则保证深度学习算法的快速实现。
9.作为优选,所述的夹爪机械臂设置在传送带后端的两边,一边三个,一共六个,夹爪机械臂由plc驱动抓取垃圾放入对应的收集箱中。
10.作为优选,所述的传送带由伺服电机驱动,伺服电机与编码器相连接,编码器与伺服电机相连接,编码器连接到了plc上,plc根据编码器的脉冲触发采集控制模块发出采集命令控制高光谱相机和单线激光雷达采集数据。所述工控机与plc相连接,采集到的数据经
过工控机处理经过网络通信发送给plc,驱动夹爪机械臂对垃圾进行分类。
11.有益效果:与现有技术相比,本实用新型具有以下优点:
12.(1)首次将高光谱和单线激光雷达数据融合的技术应用在垃圾分选的领域上,由于不同材料反射电磁波的频谱数据不同,与普通的彩色相机相比,本实用新型利用高光谱成像仪采集不同材料反射光谱的图像,进而进行识别和分类。
13.(2)利用单线激光雷达可以采集待分类垃圾的高度,编码器可以追踪垃圾的位置,从而获取传送带上待检测的垃圾的三维空间位置,从而使夹爪机械臂更加精确的抓取垃圾并进行分类。
附图说明
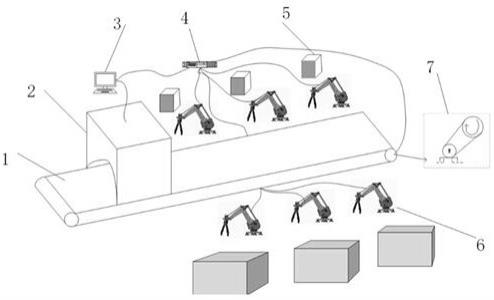
14.图1为本实用新型结构示意图。
15.图2为本实用新型中数据采集系统的结构示意图。
具体实施方式
16.下面结合附图和具体实例,进一步阐明本实用新型,本实例在以本实用新型技术方案为前提下进行实施,应理解这些实例仅用于说明本实用新型而不用于限制本实用新型的范围。
17.如图1和图2所示,一种垃圾识别和自动分选装置,包括传送带1,传送带1的前端上方相应的安装有用于数据采集的暗箱2;暗箱2内设置有数据采集系统;传送带1后端两侧放置有6个夹爪机械臂6,每个夹爪机械臂6还相应的放置了分类完的垃圾收集箱5;传送带由伺服电机驱动,伺服电机和编码器7连接到了plc4上;plc4与工控机3相连接;数据采集系统的采集控制模块9连接到了plc上4,并与高光谱相机11和单线激光雷达10相连接。
18.数据采集系统包括高光谱相机11和单线激光雷达10,其两侧设置了光源12;光源12上方为穹顶8,下方为毛玻璃13;毛玻璃12中间留出用于数据采集的间隙。
19.高光谱相机11可以获得待分类垃圾的光谱信息,单线激光雷达10获得经过的垃圾的高度信息,同时编码器可以追踪识别到的垃圾的位置,形成待分类垃圾的三维空间信息。光源设置为卤素灯,传送带上编码器产生脉冲,plc4对脉冲进行计数并触发采集控制模块9对高光谱相机11和单线激光雷达10进行数据采集。
20.传送带后端的夹爪机械臂6由plc4驱动,工控机3在识别完采集到的待分类的垃圾数据之后,结果通过千兆网口通讯发送给plc4,plc4驱动夹爪机械臂6分拣出垃圾并丢入相应的垃圾收集箱5。
21.本实用新型在使用时,待分类的垃圾从传送带1始端进入,穿过暗箱2和传送带1间的空隙进入成像系统。传送带1上的伺服电机带动编码器,plc4对编码器脉冲进行计数,随后相采集控制模块9发出采集命令,触发高光谱相机11和单线激光雷达10进行数据采集。得到的数据传输到工控机3内,经过算法的处理,完成对垃圾的分类。分类结果通过千兆网口发送给plc4。plc4收到处理结果之后驱动夹爪机械臂6分拣,并放入垃圾收集箱5中。
22.本装置可通过数据采集系统对垃圾的种类进行分辨,实现垃圾的自动分选,工控机3采集高光谱相机11和单线激光雷达10的数据信息,将垃圾进行标记,分类结果分别对应传送带1上的夹爪机械臂6以及垃圾收集箱5,当然本装置还可根据垃圾种类增设多组夹爪
机械臂6和垃圾收集箱5,经由数据采集系统和工控机3的分析处理后,plc4驱动夹爪机械臂6分拣出垃圾,放入相应的垃圾收集箱5内,可快速、准确的完成垃圾的种类甄别、标记和分选的工作,相应提高了工作效率,节省了人工成本。
23.本装置的光谱成像系统采用高光谱相机11, 将成像技术与光谱技术相结合,探测目标的二维几何空间及一维光谱信息,获取高光谱分辨率的连续、窄波段的图像数据,由于不同材料的反射光谱不同,运用此方案提高了对垃圾分选的准确性;整个数据采集系统放在了密闭的暗箱2内,将保持高光谱相机11成像的环境在一个较低的温度,从而减少采集图像时的噪声; 数据采集系统的光源为穹顶光源12并经过毛玻璃13散射从而消除镜面反射,且保证光照均匀;使用plc4来控制数据采集模块9触发高光谱相机11拍照和单线激光雷达10的扫描,相比于己有装置的数据采集过程,本装置的数据采集系统将得到更好的数据,采集到的数据经过工控机3处理并与plc4通信,最终输出控制夹爪机械臂6分拣出垃圾,本实用新型分选快速、准确率高,大大提高了垃圾分选的效率,且节省了人工成本。
24.上述具体实施方式只是在本实用新型的一个优选实施例,并不是用来限制本实用新型的实施与权利要求范围的,凡依据本实用新型申请专利保护范围内容做出的等效变化和修饰,均应包括于本实用新型专利申请的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1