用于分拣容器的装置、以及相关的设备和方法与流程
1.本发明涉及用于分拣容器的装置。本发明还涉及包括这种分拣装置的分拣设备。本发明还涉及容器分拣方法。
2.本发明涉及容器物流领域。
背景技术:
3.例如,这种容器是酒的瓶子。
4.当消费者购买一瓶酒时,这瓶酒从收获到运送给消费者已经行进了长的路。
5.在这种情况下,这瓶酒所遵循的路径涉及多个参与者,包括生产商、分销商以及零售商,消费者从零售商购买。
6.这些参与者中的每个参与者执行多个操作。
7.对于酒生产商,酿酒以七个主要阶段来进行。
8.在第一阶段中,进行葡萄的收获。葡萄必须在正确的时间进行收获,确定这个时间需要很大的技巧。根据情况,收获通过手动完成或者用收获机器来完成。在收获时,特别地为了剔除不合适的果实,葡萄串被分拣。
9.在第二步骤中,进行粉碎和挤压。粉碎和挤压步骤通常自动地进行以获得果汁。
10.第三步骤是发酵,通常在发酵腔室中进行。果汁经历化学转化、酒精发酵,在此期间葡萄糖变成乙醇。
11.接下来的步骤是净化,以从酒中移除所有的废物和残渣。净化是通过过滤器或提纯来实现的。
12.第六步骤是将酒装瓶。酒在成熟阶段之后被装瓶。在该装瓶阶段,瓶子被消毒。然后用冲洗器清洗空的瓶子,再用填充器将瓶子装满酒,最后用压塞机将塞子布置在瓶子的颈部。装瓶阶段还包括加盖和贴标签。
13.第七步骤是将酒装箱。
14.酒的箱子随后被储存并输送给分销商。这些操作是标准的物流操作。同样类型的操作在分销商和零售商处发生。
15.然而,由于对酒的日益增长的需求,期望加快所有上述阶段和操作的步伐而不降低质量。
16.这种期望与以上描述的所有阶段和操作都被完美地控制且自动化的事实背道而驰,因而提高生产速度需要优化每个阶段和操作,特别是酒的装箱阶段。特别的,在装箱阶段,期望以受控的且最优的方式检查分销商或零售商的订单。
17.因此,需要易于实施的物流装置,以提高运送容纳在容器中的产品的能力,并且使得能够加速检查容器订单。
技术实现要素:
18.为此,本描述涉及用于分拣容器的分拣装置,该分拣装置用于容器的传送机,该容
器包括电子芯片,该电子芯片包括存储器,该存储器存储来自与容器有关的数据项和与电子芯片有关的数据项中的至少一个数据项,该传送机适合于移动容器,传送机具有至少第一路径和第二路径,分拣装置包括:芯片读取器,该芯片读取器被配置成读取存储在电子芯片的存储器中的至少一个数据项,该至少一个数据项被称为读取的数据;臂,该臂能在第一位置与至少一个第二引导位置之间移动,至少一个第二引导位置与第一位置不同,并且在至少一个第二引导位置处,臂被构造成迫使来自第一路径的容器遵循第二路径;计算器,该计算器适于输出用于控制臂的规则,以控制臂的位置,用于控制臂的规则取决于至少一个读取的数据。
19.根据特定的实施例,分拣装置包括单独采用的或以技术上可能的任何组合形式采用的以下特征中的一个或多个:
[0020]-臂远离第一路径,并且在至少一个第二引导位置处,臂至少部分地延伸穿过第一路径。
[0021]-臂能在第一位置和多个第二引导位置之间移动,以迫使容器沿着第二路径,臂在每个第二引导位置处至少部分地延伸穿过第一路径。
[0022]-臂形成推动部并且能够在第一位置与至少一个第二位置之间平移移动,特别地,臂具有远端端部,该远端端部旨在与容器接触。
[0023]-臂能在第一位置与至少一个第二引导位置之间旋转,特别地,臂具有阻挡部,阻挡部旨在与容器接触。
[0024]-计算器包括存储至少一个数据库的存储器,至少一个数据库包括来自与容器有关的预定义的数据项和与电子芯片有关的预定义的数据项中的至少一个预定义的数据项,并且计算器适于将至少一个读取的数据与至少一个预定义的数据项进行比较,以确定电子芯片的故障状态,臂的控制规则取决于电子芯片的故障状态。
[0025]-容器是容纳有含酒精的液体的瓶子。
[0026]-分拣装置包括容器的装饰单元,装饰单元被构造成将微芯片布置在容器上。
[0027]
本描述还涉及用于分拣容器的设备,该设备包括适合于移动待分拣的容器的传送机以及用于分拣容器的分拣装置,分拣装置被构造成分拣被传送机移动的容器。
[0028]
本描述进一步涉及一种分拣方法,该分拣方法通过用于分拣容器的分拣装置来实施,该分拣装置用于容器的传送机,该容器包括电子芯片,该电子芯片包括存储器,该存储器存储来自与容器有关的数据项和与电子芯片有关的数据项中的至少一个数据项,该传送机适合于移动容器,传送机具有至少第一路径和第二路径,该分拣装置包括:芯片读取器,该芯片读取器被配置成读取存储在电子芯片的存储器中的至少一个数据项,该至少一个数据项被称为读取的数据;臂,该臂能在第一位置与至少一个第二引导位置之间移动,至少一个第二引导位置与第一位置不同,并且在至少一个第二引导位置处,臂被构造成迫使来自第一路径的容器遵循第二路径;计算器,该计算器适于输出用于控制臂的规则,以控制臂的位置,用于控制臂的规则取决于至少一个读取的数据,该方法包括以下步骤:芯片读取器读取由容器的电子芯片的存储器保存的至少一个数据项,计算器输出取决于至少一个读取的数据的控制规则,以及根据臂控制规则控制臂的位置。
附图说明
[0029]
通过阅读以下仅作为示例给出的并且参考附图的对本发明的实施例的描述,本发明的其他特征和优点将变得显而易见,在附图中:
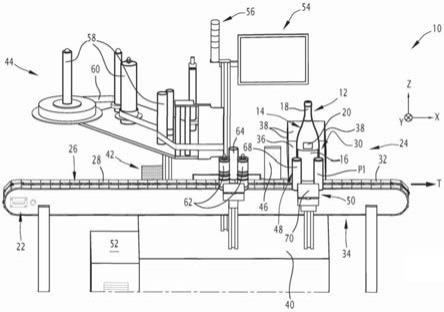
[0030]-图1是容器分拣设备的透视图,该容器分拣设备包括具有在第一位置处的臂的分拣装置,
[0031]-图2是图1的设备的一部分的顶部示意图,在该顶部示意图中分拣装置的臂具有第一位置,
[0032]-图3是图1的设备的一部分的顶部示意图,在该顶部示意图中分拣装置的臂具有第二位置,
[0033]-图4是在第二位置处的臂的视图,该第二位置不同于图3的第二位置,
[0034]-图5是在第二位置处的臂的视图,该第二位置不同于图4的第二位置,
[0035]-图6是在第二位置处的臂的视图,该第二位置不同于图5的第二位置,
[0036]-图7是在第一位置处的臂的另一示例的示意图,
[0037]-图8是在第二位置处的图7的臂的示意图,
[0038]-图9是在第二位置处的图7的臂的示意图,该第二位置不同于图8的第二位置,以及
[0039]-图10是在第二位置处的图7的臂的示意图,该第二位置不同于图9的第二位置。
具体实施方式
[0040]
在图1中描绘了容器分拣设备10。分拣设备10被设计成对多个容器12进行分拣。
[0041]
例如待分拣的容器12是容器的订单的一部分的并且待分拣的容器12。例如,容器也旨在被说明。
[0042]
此外,在本描述中,限定了纵向方向。纵向方向由x-轴线表示,并且在下文中被称为“纵向方向x”。
[0043]
还限定了与纵向方向x垂直的横向方向。横向方向由y-轴线表示,并且在下文中被称为“横向方向y”。在横向方向y上测量的设备元件10的尺寸被称为“宽度”。
[0044]
还限定了与纵向方向x和横向方向y垂直的竖直方向。竖直方向由z-轴线表示,并且在下文中被称为“竖直方向z”。此外,在本描述中,应当理解,当在竖直方向z上,元件a具有比元件b更低的高度时,元件a位于元件b的下方。
[0045]
例如,每个容器12是瓶子12。
[0046]
每个瓶子12包含液体物质。在给出的示例中,液体物质是酒。更通常地,液体物质是酒精。
[0047]
在另一实施例中,液体物质是烈酒。
[0048]
在另一实施例中,瓶子12是香水瓶子。在这种情况下,瓶子12有时被称为长颈瓶。
[0049]
如图1所示,瓶子12具有筒体14、标签16、盖子18以及芯片20。
[0050]
筒体14是瓶子12的主要的且最大的部分。筒体有时被称为“主体”。
[0051]
电子芯片20在下文中被称为“芯片20”。
[0052]
芯片20是可见的,并且被布置在筒体14上,例如在标签16上方。
[0053]
芯片20黏附地粘结到筒体14。
[0054]
可替代地,芯片20位于除了瓶子12的筒体14以外的位置处。
[0055]
可替代地,芯片20是不可见的。在这种情况下,芯片20被布置在标签16的下方、瓶子12的背面标签(在图中不可见)的下方、或者密封盖子18的下方。
[0056]
在下文中,芯片20是指能够存储至少一条信息并且使用非接触式通信协议与另一装置进行通信的任何电子装置(集成电路)。换言之,芯片20是第一无线通讯装置。
[0057]
芯片20包括与用于信号交换的天线(在附图中未示出)相关联的微处理器(在附图中未示出)。微处理器还具有用于存储信息的存储器。
[0058]
因此芯片20与微处理器的存储器存储的信息相关联。
[0059]
芯片20在其存储器中存储至少一个与瓶子12有关的数据项。
[0060]
以示例说明,与瓶子12有关的数据项是用于瓶子12的识别数据。
[0061]
例如,瓶子12的识别数据包括瓶子12的标识符、生产地点信息、瓶子12的内容物的年份、生产商标识符、瓶子12的内容物的性质(即内容物是否是红葡萄酒、白葡萄酒、香槟、威士忌等)、瓶子12的轮廓的名称、装瓶的日期和时间的数据、生产结束的日期和时间的数据、瓶子12中所包含的酒来自的储罐、塞子的识别数据、瓶子12所属于的批次号和/或与瓶子12的容积有关的信息(即瓶子12包含的酒的量)。
[0062]
例如,芯片20是rfid(射频识别,radio frequency identification)芯片。
[0063]
芯片20能够根据符合iso 15693标准的rfid通信协议进行通信。通信范围例如介于10cm至10米(m)之间。该通信协议也可以被称为“uhf”通信协议。缩写“uhf”代表超高频。在这种协议中,芯片20能够发送或接收频率在300mhz至3000mhz之间的信号。
[0064]
可替代地,芯片20能够使用hf rfid通信协议进行通信。缩写“hf”代表高频。在这种通信协议中,芯片20能够发送或接收频率在3mhz至30mhz之间的信号。此外,在这种协议中,芯片20的读取距离小于20cm。
[0065]
在一个特定的情况下,芯片20适合于在两个不同的频率范围内运行。在这个意义上,芯片20可以被描述为双频芯片20。因此,芯片20适于在两个不同的频率范围内通信。在这种情况下,芯片20适于根据hf通信协议和/或uhf通信协议进行通信。
[0066]
由于国际标准,每个芯片20具有形成用于芯片20的数据项的唯一标识符。因此,没有两个芯片20可以具有相同的标识符。例如,当芯片20被制造时,该标识符被存储在芯片20的存储器中。
[0067]
为了给出关于尺度的感观,芯片20是长35毫米(mm)宽20mm的长方形。然而,芯片20不限于这种几何形状,并且可以具有可变的尺寸和形状(正方形、长直形、圆形等)。
[0068]
设备10包括传送机22和用于分拣瓶子12的装置24。
[0069]
传送机22被构造成移动待分拣的瓶子12。
[0070]
传送机22包括传送带26、第一路径28以及至少一个第二路径30。
[0071]
在这种情况下,传送带26包括多个相互铰接的板。
[0072]
传送带26被构造成在平行于纵向方向x的被称为t的驱动方向上以恒定的速度(所谓的瓶子12的驱动速度)来驱动瓶子12。
[0073]
因此,传送带26被划分为前进通道32和返回通道34。
[0074]
前进通道32在驱动方向t上是可移动的。
[0075]
返回通道34在与驱动方向t相反的方向上是可移动的,并且位于前进通道32的下
方。
[0076]
第一路径28对应于传送带26的前进通道32。因此,第一路径28适合于沿驱动方向t以驱动速度来移动瓶子12。
[0077]
第一路径28在与由纵向方向x和横向方向y限定的平面xy平行的平面(在下文中被称为“第一路径28的平面”)中延伸。
[0078]
第二路径30与第一路径28分开。
[0079]
第二路径30是第一路径28的分支。特别地,第二路径30垂直于第一路径28。
[0080]
第二路径30具有底部36以及用于保持瓶子12的至少三个侧壁38。
[0081]
底部36与传送带26的前进通道32齐平。
[0082]
保持侧壁38从底部36突出。
[0083]
分拣装置24被构造成对多个瓶子12进行分拣。
[0084]
分拣装置24包括保持部40、瓶子检测器42、装饰单元44、芯片读取器46、臂48、用于臂48的驱动单元50、计算器52、显示单元54、人-机器接口(human-machine interface,hmi)、以及可视指示器56。
[0085]
为了便于描述,下面关于单个瓶子12对分拣装置24进行描述。
[0086]
保持部40具有平行六面体形状。
[0087]
保持部40至少部分地布置在传送机22下方。保持部40至少部分地支撑分拣装置24的其他元件。
[0088]
检测器42被配置成检测传送机22上的瓶子12的存在。
[0089]
装饰单元44被构造成将芯片20布置在瓶子12上。
[0090]
装饰单元44包括多个保持部58以及用于将芯片20施加到瓶子12的装置。
[0091]
芯片20最初可释放地粘结到以辊的形式提供的条带60上。
[0092]
多个保持器58被构造成支撑条带60并将条带引导到施加器。
[0093]
施加器包括至少三个旋转圆柱体62和64。
[0094]
在三个旋转圆柱体中,被称为“定位圆柱体62”的两个第一旋转圆柱体62适合于将瓶子12定位在瓶子12被定位以接纳芯片20的位置。定位圆柱体62能围绕竖直方向z旋转。
[0095]
被称为“施加圆柱体64”的第三旋转圆柱体64被构造成将芯片20施加到瓶子12的筒体14。施加圆柱体64能围绕竖直方向z旋转。
[0096]
在本实施例中,芯片读取器46适于根据如下的通信协议来运行:该通信协议适合于将与瓶子12有关的数据写入到芯片存储器20中并且对存储在芯片存储器20中的数据进行读取。
[0097]
通信协议至少包括uhf rfid通信协议或hf rfid通信协议。
[0098]
芯片读取器46具有激活运行模式和非激活运行模式,在激活运行模式中,芯片读取器46能够写入和/或读取存储在芯片存储器20中的数据,并且在非激活运行模式中,读取器46不能写入和/或读取存储在芯片存储器20中的数据。
[0099]
例如,芯片读取器46连接到存在检测器42。
[0100]
存在检测器42能够根据传送机22上瓶子12的存在或不存在来控制芯片读取器46处于激活运行模式或非激活运行模式。
[0101]
臂48包括至少一个杆66(在图3至图6中示意性可见)并且具有远端端部68。
[0102]
在该示例中,臂48具有两个杆66,这两个杆可以在横向方向y上(即,垂直于驱动方向t)平移移动。
[0103]
杆66的每个端部布置有触摸瓶子12的接触元件。
[0104]
臂48的远端端部68由两个接触元件形成,并且旨在与瓶子12接触。
[0105]
臂48能在第一位置p1和至少第二引导位置p2之间移动。
[0106]
参照图2至图6对第一位置p1和至少一个第二位置p2进行了详细说明。这些附图是设备10的部分的示意图,在附图中臂48的远端端部68被简化并且由圆表示。
[0107]
如在图2中示出,在第一位置p1,臂48远离第一路径28。
[0108]
换言之,在第一位置p1中,臂48的远端端部68和杆66远离第一路径28。
[0109]
应当理解,由于远离第一路径28,臂48使得瓶子12能够在第一路径28上被驱动,并且不会与臂48接触。
[0110]
在这种情况下,当臂48远离第一路径28时,臂48在第一路径28的平面中的正交投影在第一路径28的外侧。
[0111]
臂48被构造成具有多个第二引导位置p2,在下文中被称为“第二位置p2”。
[0112]
臂48的多个第二位置p2在图3至图6中示出。
[0113]
每个第二位置p2不同于第一位置p1。
[0114]
在每个第二位置p2中,臂48在横向方向y上至少部分地延伸穿过第一路径28。因此,在臂48的第二位置p2中,臂48在第一路径28的平面中的正交投影至少部分地位于第一路径28上。特别地,在第二位置p2中,臂48的远端端部68在第一路径28的平面中的正交投影至少部分地位于第一路径28上。
[0115]
图3至图5示出了在第二中间位置(被标记为p2i)中的臂48。
[0116]
在每个第二中间位置p2i处,臂48部分地在第一路径28上延伸。
[0117]
图6示出了臂48的第二位置p2,该第二位置对应于臂48的最大延伸。臂48的最大延伸的位置标记为p2
max
。
[0118]
在这种情况下,在臂48的最大延伸的位置p2
max
处,臂48延伸穿过整个第一路径28。换言之,臂48在第一路径28的平面中的正交投影截断第一路径28的全部宽度。
[0119]
此外,在位置p2
max
处,臂48的远端端部68位于第一路径28和第二路径30之间的交界处。第一路径28和第二路径30之间的交界在图2至图10中以虚线示出。
[0120]
附图标记p2用于指定中间位置p2i或最大延伸位置p2
max
。因此,臂48能沿着横向方向y在第一位置p1和多个第二位置p2之间平移,以迫使来自第一路径28的瓶子12遵循第二路径30。
[0121]
在每个第二位置p2处,臂48被构造成迫使来自第一路径28的瓶子12遵循第二路径30。
[0122]
在本实施例中,臂48形成推动部。
[0123]
臂48的驱动单元50包括例如容纳部70和电动马达(在附图中未示出)。
[0124]
容纳部70附接到分拣装置24的保持部40。
[0125]
容纳部70被布置在第一路径28的外侧。
[0126]
容纳部70至少部分地容纳杆66。
[0127]
电动马达被配置成驱动臂48相对于容纳部70在第一位置p1和多个第二位置p2之
间平移。
[0128]
电动马达被容纳在容纳部70中。
[0129]
在这种情况下,臂48、容纳部70以及驱动单元50形成电动机械缸。
[0130]
计算器52具有存储器(在附图中未示出)。
[0131]
计算器52的存储器存储至少一个数据库。
[0132]
在这种情况下,计算器52存储第一数据库和第二数据库。
[0133]
第一数据库包括与瓶子12有关的数据。
[0134]
例如,第一数据库进一步包括与瓶子12的数量有关的数据,例如订单中的瓶子12的数量。
[0135]
因此,以示例说明,第一数据库代表瓶12的订单。
[0136]
第二数据库存储与芯片20有关的数据,即芯片的标识符。
[0137]
存储在计算器52中的与瓶子12有关的数据以及与芯片20有关的数据形成预定义的数据。
[0138]
计算器52适于将芯片读取器46读取的至少一个数据项与预定义的数据进行比较,以确定芯片20的故障状态或芯片20的有效状态。
[0139]
计算器52适于输出臂48的控制规则l,臂的控制规则控制臂48的位置。臂48的控制规则l取决于从芯片20的存储器读取的数据。
[0140]
控制规则l是存储在计算器52的存储器中的函数(被表示为f)的输出。
[0141]
函数f与输入e和输出(即控制规则l)相关联。
[0142]
换言之,f(e)=l。
[0143]
函数f的输入e至少包括芯片20的状态,即芯片20的有效状态或故障状态。因此,臂48的控制规则l取决于芯片20的故障状态或有效状态。
[0144]
芯片20的故障状态可以对应于损坏的芯片20。
[0145]
可替代地或另外地,芯片20的故障状态对应于天线和芯片20的微处理器之间的不良连接。
[0146]
可替代地或另外地,故障状态对应于芯片20的在第二数据库中的未知标识符。
[0147]
将参照分拣方法来说明计算器52对芯片20的故障状态和有效状态的确定。
[0148]
芯片20的有效状态与故障状态相对地限定。
[0149]
此外,函数f将以下输入参数中的至少一个作为输入e:
[0150]-芯片读取器46和第二路径30之间沿纵向方向x的距离,
[0151]-沿第一路径28驱动瓶子12的速度,
[0152]-沿横向方向y测量的第一路径28的宽度,
[0153]-正在被运输的瓶子12的重量,
[0154]-臂48的初始位置,该初始位置对应于参考系x、y、z中的第一位置p1,
[0155]-在多个第二位置p2处的臂48在参考系x、y、z中的位置,
[0156]-沿纵向方向x测量的在传送机22上的两个瓶子12之间的最小距离,
[0157]-臂48的移动的速度,以及
[0158]-臂48的反应时间。
[0159]
控制规则l给出了臂48随时间的位置。
[0160]
以示例说明,臂48的位置是臂48在参考系x、y、z中的一组坐标。
[0161]
臂48的位置例如为臂48的远端端部68的位置。
[0162]
函数f使得当芯片20具有故障状态时,臂48的远端端部68的位置不同于位置p1。换言之,臂48的远端端部68随时间的位置包括位置p2,每个位置p2i、p2
max
具有时间依赖性。
[0163]
函数f还使得当芯片20处于有效状态时,臂48的远端端部68的位置等于第一位置p1。
[0164]
根据特定的实施例,函数f是集成了来自上文限定的输入参数的列表中的至少一个其他输入e的函数。
[0165]
例如,除了作为输入e的芯片20的状态之外,函数f还包括至少一个其他输入e,例如瓶子12的重量。例如,函数f使得:瓶子12的重量越大,驱动臂48的电动马达的功率就越大。
[0166]
根据另一示例,除了作为输入e的芯片20的状态之外,函数f还包括瓶子12的速度。因此,函数f使得:瓶子12在传送机22上被驱动的速度越高,驱动臂48的电动马达的速度就越高。
[0167]
在这种情况下,控制规则l也控制可视指示器56随时间的配置。
[0168]
显示单元54包括触摸屏。在这种情况下,显示单元54和hmi接口被合并。
[0169]
显示单元54包括非触摸屏。在这种情况下,hmi接口包括例如键盘。
[0170]
在这种情况下,指示器56包括光源(在附图中未示出)。
[0171]
指示器56至少具有第一配置和第二配置。
[0172]
在第一配置中,指示器56表示臂48的第一位置p1。在第一配置中,光源被关闭。
[0173]
在第二配置中,指示器56表示位于第二位置p2的臂48。在第二配置中,光源被点亮或闪烁。
[0174]
臂48的控制规则l也适合于控制处于任一配置中的指示器56。
[0175]
在这种情况下,指示器56是可视指示器,但是可替代地,指示器56可以是声音指示器。
[0176]
现在描述由先前描述的分拣装置24执行的分拣方法。
[0177]
关于单个瓶子12来描述瓶子12的分拣方法,但是对于每个其他瓶子12以对应的顺序重复瓶子的分拣方法。
[0178]
最初,臂48处于第一位置p1,如图1和图2所示。
[0179]
瓶子12被布置在传送机22的传送带26的前进通道32上,即第一路径28上。
[0180]
前进通道32沿驱动方向t驱动瓶子12。
[0181]
当瓶子12到达瓶子检测器42附近时,检测器42检测瓶子12。
[0182]
一旦检测器42检测到瓶子12,检测器12将芯片读取器46激活至激活运行模式。
[0183]
然后瓶子12到达装饰单元44处。
[0184]
两个定位圆柱体62将瓶子12定位到用于接纳芯片20的位置。
[0185]
施加圆柱体64将芯片20施加到瓶子12的筒体14上,位于标签16上方。
[0186]
接下来,瓶子12到达芯片读取器46的前方。
[0187]
芯片读取器46向芯片20的存储器写入关于瓶子12的在第一数据库中列出的瓶子12的信息。
[0188]
在向芯片20写入之后,芯片读取器46读取存储在芯片20的存储器中的与瓶子12和芯片20的标识符有关的写入数据。
[0189]
计算器52将读取的瓶子12的数据与在第一数据库中的该瓶子12的数据进行比较,并且将芯片20的标识符与第二数据库中的数据进行比较。
[0190]
如果读取的瓶子12的数据与存储在第一数据库中的该瓶子12的数据不同,和/或如果读取的标识符与第二数据库中列出的标识符中的任何标识符都不同,则确定该瓶子12的芯片20的故障状态。
[0191]
与存储的预定义的数据不同的读取的数据例如对应于以下特征中的至少一个:没有读取的数据,不完整的读取的数据,未知的芯片20的标识符。
[0192]
在这种情况下,计算器52确定芯片20的故障状态。
[0193]
作为确定芯片20的故障状态的结果,计算器52输出臂48的控制规则l。控制规则l是函数f的输出,该函数至少以芯片20的故障状态作为输入e。
[0194]
可替代地,函数f包括来自先前定义的输入参数的列表的至少一个其他输入。
[0195]
然后,计算器52输出臂48的控制规则l,该控制规则是芯片20的故障状态的函数。
[0196]
控制规则l给出臂48的作为时间的函数的多个第二位置p2和位置p1。
[0197]
特别地,控制规则l给出作为时间的函数的多个中间位置p2i和最大延伸位置p2
max
。
[0198]
因此,控制规则l控制臂48沿着平移方向y从第一位置p1经过多个第二中间位置p2i(在图3至图5中可见)平移到最大延伸位置p
max
(在图6中可见)。
[0199]
在每个第二位置p2处,臂48迫使来自第一路径48的瓶子12遵循第二路径30。在第二位置p2,臂48的远端端部68与瓶子12接触。
[0200]
一旦臂48到达最大延伸位置p2
max
,控制规则l就控制臂48返回到第一位置p1(在图1和图2中可见)。
[0201]
此外,控制规则l进一步包括控制处于第二配置中的可视指示器56。因此,控制规则l控制可视指示器56的光源的点亮。
[0202]
如果在比较步骤中,读取的瓶子12的数据与存储在第一数据库中的数据相似,并且芯片20的数据与第二数据库中的至少一个数据相似,则计算器52确定芯片20的有效状态。
[0203]
然后,计算器52输出控制规则l,该控制规则是在至少将芯片20的有效状态作为输入e的情况下函数f的输出。换言之,控制规则l取决于芯片20的有效状态。
[0204]
控制规则l提供臂48在第一位置p1中的位置。然后,控制规则l将臂48保持在第一位置p1中。在这种情况下,臂48保持在远离第一路径28的第一位置p1中。
[0205]
控制规则l还控制处于第一配置中的可视指示器56。因此,控制规则l保持可视指示器56的光源被关闭。
[0206]
此外,瓶子12的存储在第一数据库中的数量减去一个瓶子12。
[0207]
因此,分拣装置24使得能够对分销商或零售商的订单进行受控的、最优的监督。
[0208]
事实上,芯片20被自动地检查,并且分拣装置24使得能够通过消除具有故障芯片20的瓶子12来对瓶子12进行分拣。因此,通过省去对瓶子的特别长的且繁琐的手动检查,分拣装置24使得能够加速检查安装有芯片20的瓶子12。
[0209]
此外,分拣装置24使得能够自动地检查订单中的瓶子12的数量。特别地,这避免了在对瓶子12进行计数时的错误。
[0210]
因此,分拣装置24使得能够快速地对瓶子12进行装箱,同时确保由瓶子12负载的芯片20的有效性。
[0211]
可替代地,芯片读取器46不能向芯片20的存储器进行写入。在这种情况下,分拣装置24可以不包括装饰单元44。
[0212]
例如,在进入分拣装置24之前,瓶子12最初就布置有芯片20,芯片存储了与瓶子12和芯片20有关的数据。
[0213]
分拣方法与先前描述的分拣方法的不同之处在于,该分拣方法不包括向芯片20写入的步骤。
[0214]
可替代地,分拣装置24进一步包括读码器。
[0215]
在该实施例中,除了电子芯片20之外,瓶子12还包括表示与瓶子12有关的一个或多个附加信息的条形码或方形码。
[0216]
读码器能够读取这些附加信息或每个附加信息。
[0217]
例如,读码器连接到芯片读取器46。
[0218]
此外,在这种情况下,读码器在第一路径28上沿行进方向t被布置在芯片读取器46的上游。
[0219]
分拣方法与先前描述的分拣方法的不同之处在于,该分拣方法包括在芯片读取器46读取存储在芯片20中的数据之前,读取与瓶子12有关的附加信息。
[0220]
因此,当瓶子12出现在芯片读取器46的前方时,芯片读取器46将关于芯片20的信息以及读取的附加信息写入芯片20的存储器中。
[0221]
可替代地,分拣装置24进一步包括第二芯片读取器。
[0222]
第二芯片读取器是例如手动读取器。例如,芯片读取器是个人数字助理(pda)。
[0223]
分拣过程与先前描述的分拣方法的不同之处在于,该分拣过程包括使用第二芯片读取器读取芯片20。
[0224]
例如,第二芯片读取器可以读取布置在较大的瓶子12上的芯片20,在图1至图3的实施例中描述的芯片读取器46不能读取该芯片。
[0225]
下面参照图7至图10描述分拣装置24的另一实施例。该实施例仅与图1至图6的实施例对比地来描述。
[0226]
在该实施例中,唯一的不同是臂48和臂48的驱动单元50。
[0227]
在该实施例中,臂48能围绕竖直方向z旋转。
[0228]
臂48具有例如为平行六面体形状的阻挡部72。
[0229]
阻挡部72从第一路径28和第二路径30的底部36突出。
[0230]
阻挡部72具有两个侧面。
[0231]
在这种情况下,侧面中的一个侧面旨在与瓶子12接触。
[0232]
在下文中,臂48的位置例如由阻挡部72的自由端部在参考系x、y、z中的位置来标记。
[0233]
在臂48的第一位置p1中,阻挡部72远离第一路径28。
[0234]
在臂48的第一位置p1中,阻挡部72位于第二路径30中。换言之,臂48在第一路径28
的平面中的正交投影位于第一路径28外侧。
[0235]
臂48被构造成具有多个第二位置p2。多个第二位置p2在图8至图10中示出。
[0236]
每个第二位置p2不同于第一位置p1。
[0237]
在每个第二位置p2处,臂48至少部分地延伸穿过第一路径28。特别地,在每个第二位置p2中,阻挡部72在第一路径28的平面中的正交投影至少部分地位于第一路径28上。
[0238]
图8示出了在最大延伸的位置p2
max
处的臂48。最大延伸的位置p2
max
对应于臂48从第一位置p1开始的最大旋转角度。
[0239]
在这种情况下,在臂48的最大延伸的位置p2
max
处,臂48延伸穿过整个第一路径28。
[0240]
在每个第二位置p2处,臂48被构造成迫使来自第一路径28的瓶子12遵循第二路径30。
[0241]
因此,臂48能在第一位置p1和最大旋转位置p2
max
之间移动穿过多个第二中间位置p2i。
[0242]
容纳部70容纳电动马达。例如,容纳部70被布置在第二路径30中,远离第一路径和第二路径28。
[0243]
电动马达(在附图中未示出)被配置成驱动臂48围绕竖直轴线z旋转。
[0244]
与参照图7至图10描述的分拣方法对比地描述了该分拣方法。
[0245]
最初,臂48处于第一位置p1。
[0246]
在计算器52确定了芯片20的故障状态的情况下,计算器52输出控制规则l。控制规则l是函数f的输出,该函数至少将芯片20的故障状态作为输入。
[0247]
输出控制规则l给出了在多个第二位置p2处的臂48随时间的位置。
[0248]
特别地,控制规则l给出了作为时间的函数的在最大延伸位置p2
max
以及多个中间位置p2i处的臂的位置。
[0249]
因此,在本实施例中,从初始位置p1(在图7中可见)起,臂48首先旋转到最大延伸位置p2
max
。因此,在第一路径28上被驱动的具有故障芯片20的瓶子12与臂48的阻挡部72发生接触并且被臂48阻挡。
[0250]
然后,从最大延伸位置p2
max
起,臂48旋转穿过多个中间第二位置p2i(图9和图10)而到达第一位置p1,以迫使瓶子12遵循第二路径30。
[0251]
因此,在多个第二位置p2中,臂48迫使瓶子12移动到第二路径30上。
[0252]
在该实施例中,臂48形成转轨器。
[0253]
因此,分拣装置24使得能够在易于实施的情况下提高了对容器12进行装箱的能力,并且加快了对容器订单的检查。
[0254]
特别地,通过分拣装置24,具有故障芯片20的为了订单而待装箱的容器12被自动地分拣,从而节省了相当多的时间并且释放了用于其他任务的人力。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1