一种莲子去心加工疵品分选装置及分选方法
1.本发明涉及莲子加工检测领域,具体涉及一种莲子去心加工疵品分选装置及分选方法。
背景技术:
2.根据外观进行品质分选是食品生产中的重要工序,用以保证食品质量、确定食品产品的档次。莲子是一种营养食品,外形呈椭球状,其在成为食品以前,通常需要经过去心加工,去除莲子内部苦涩的莲心。理想情况下,莲子去心后将在莲子上沿轴线形成一通孔,莲心沿此孔完全排出。然而,实际上由于莲子大小、形状各异,且莲子去心设备工位固定,莲子位姿一致性较差,使得去心加工时很容易钻偏,形成多种类型的去心加工疵品,例如腰部钻偏莲子(通孔位于莲子圆周上)、端面钻偏莲子(孔偏离莲子轴线)、重复钻孔莲子(多次去心,形成多个孔)、钻破莲子(孔边产生破裂)、未钻通莲子(孔未通,仅一侧有孔)等,造成莲心去除不彻底、莲子外观品质及肉质受损并影响最终莲子产品的品质,因此,需要对这些疵品进行分选并剔除。
3.现有的莲子加工疵品分选主要依靠人工,工人通过对莲子外观进行逐个观察进而将疵品挑出。当加工产量较大时,需要大量人力参与,检测成本高。另外,人工检测存在漏检率高、标准把握不一致等问题,长时间检测还会产生视觉疲劳,影响生产进度与分选质量。目前,现虽已有色选设备应用于莲子生产,但其是针对莲子剥壳加工,用于将剥壳后的红色莲仁与黑色未完全剥壳莲子、未剥壳莲子、瘪子及莲壳等疵品分离。采用的是基于图像处理的计算机视觉检测方法,依据物料间表面整体颜色、形状特征差异执行分选,但是该方法不适用于被检物整体颜色一致且与加工孔洞特征紧密相关的莲子去心加工疵品分选过程。
技术实现要素:
4.为解决上述技术问题,本发明提供一种莲子去心加工疵品分选装置及分选方法。所采用的技术方案如下:
5.第一方面,本发明提供了一种莲子去心加工疵品分选装置,包括莲子输送系统、图像采集系统、分选控制系统、分选执行系统等部分,所述分选控制系统采用深度学习算法对图像采集系统采集的莲子表面的图片或视频信息进行处理,识别出莲子经去心加工后在表面上留下的去心孔洞特征,并根据莲子去心加工疵品和良品存在的去心孔洞位置、数量、组合及外观特征差异进行分类,从而分选出良品及腰部钻偏莲子、端面钻偏莲子、重复钻孔莲子、钻破莲子、未加工莲子与未钻通莲子等疵品,所述分选控制系统根据莲子分类结果控制分选执行系统工作,对疵品予以剔除;
6.所述莲子输送系统包括机架、滚子链传动系统、动力传动装置、电动机、进料系统等部分,其中,所述滚子链传动系统位于机架上部;所述进料系统位于滚子链传动系统一端,可将莲子逐颗间歇送往链条链节处;所述电动机通过动力传动装置驱动滚子链传动系统和进料系统工作;
7.所述图像采集系统位于滚子链传动系统中部,包括相机支架、检测相机、辅助光源等部分;所述滚子链传动系统上部工作链条中的滚子,在向前运动过程中可产生自转,进而带动落入链条两滚子间的莲子产生自转,所述莲子开始转动后,在链条上完成滚正定向,并可在通过检测相机视野时改变姿态,以展示表面特征;
8.所述分选控制系统包括控制器,所述控制器与图像采集系统相连接,所述控制器所采用的深度学习算法,依据深度学习权重对进入检测相机视野的莲子整体特征或者去心孔洞特征进行自动识别与分类,并由控制程序做出分选决策;所述深度学习权重是通过对预先准备的各类去心加工莲子的外观图片数据集进行训练获得;
9.所述分选执行系统位于滚子链传动系统另一端,包括剔除机构、分料装置、收集装置等部分,其中,所述的剔除机构可接受分选控制系统的指令,对指定链条链节上的莲子去心加工疵品予以剔除;被剔除的莲子去心加工疵品经过分料装置中的管道落入收集装置指定区域;良品则随滚子链传动系统运动自然落入收集装置对应区域。
10.进一步的,所述分选控制器可通过对莲子上的去心孔洞进行识别,也可对包含去心孔洞在内的莲子整体进行识别实现分选。
11.进一步的,所述图像采集系统包括一台或多台沿不同方位布置的检测相机,以获得莲子外观特征信息。
12.进一步的,所述滚子链传动系统上部工作链条中的滚子下方布置有支撑板,所述支撑板与滚子相接触,可使滚子旋转。
13.进一步的,所述滚子链传动系统链条中的滚子具有凹槽型截面,可限制莲子在链条上仅绕自身轴线回转;相邻两滚子之间形成的空间恰好能容纳一颗莲子。
14.进一步的,所述进料系统包括料斗、抓料盘、下料管等部分;其中抓料盘上开有若干容料槽,可间歇地从料斗中逐颗取出莲子,并通过下料管向链节处送料。
15.进一步的,所述剔除机构包括多个沿链条运行方向布置的喷嘴,所述喷嘴通过支架安装于机架上,所述喷嘴通过喷气将莲子去心加工疵品分类剔除;所述分料装置具有多个管道,可供不同类型莲子去心加工疵品下料。
16.第二方面,本发明提供了一种莲子去心加工疵品分选方法,依次通过以下步骤完成:
17.(一)莲子由料斗经下料管落入滚子链条链节处,并随链条向前运动;莲子在链条向前运动过程中完成摆正;
18.(二)随后莲子进入检测相机视野并改变自身姿态,图像采集系统获取到包含莲子的图片或视频信息并发送给分选控制系统,随后由分选控制系统通过深度学习算法识别出莲子表面的去心孔洞特征信息,并由控制程序根据识别的孔洞位置、数量、组合及外观特征差异做出分选决策;或者由深度学习算法根据包含孔洞特征在内的莲子整体特征直接进行识别分类;
19.(三)莲子随链条继续运动,到达剔除机构位置时,分选控制系统根据识别分类结果向分选执行系统发送指令,疵品被相对应的喷嘴吹出,并经过分料装置中的管道落入收集装置指定区域;良品则随滚子链传动系统运动自然落入收集装置对应区域。
20.与现有技术相比,本发明的有益效果是:本发明采用深度学习算法对莲子表面及在表面上形成的去心加工孔洞特征进行自动提取与识别,并根据莲子表面去心孔洞位置、
数量、组合及外观特征的差异进行分类,从而有效分选出莲子去心加工良品及腰部钻偏莲子、端面钻偏莲子、重复钻孔莲子、钻破莲子、未加工莲子与未钻通莲子等疵品,分选精度高、鲁棒性好、检测时受周围环境因素影响小;本发明采用滚子链传动系统完成莲子的输送,链条行进过程中可以带动其上莲子转动,使莲子在通过检测相机视野时可充分展示其表面特征,保证高检测准确性,并避免误识别情况的产生;该发明可代替人工完成莲子去心疵品的分选,并具有可分选疵品类型多、分选准确性高、分选效率高的优点,可以满足莲子产品生产品质分选的需要。
附图说明
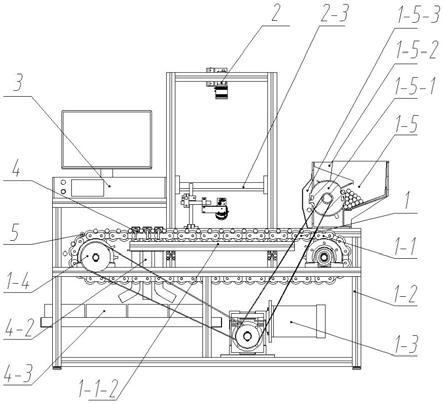
21.图1是本发明的主视图;
22.图2是本发明的左视图;
23.图3是本发明的基于深度学习的莲子去心加工疵品识别分类原理图及深度学习识别框示意图;
24.图4是本发明的检测对象-去心良品与疵品的外观特征差异主俯视示意图;
25.图5是本发明的分选执行系统局部视图;
26.图中主要组成包括:1莲子输送系统,2图像采集系统,3分选控制系统,4分选执行系统,5莲子,6去心孔洞,1-1滚子链传动系统,1-2机架,1-3电动机,1-4动力传动系统,1-5进料系统,2-1相机支架,2-2检测相机,2-3辅助光源,4-1剔除机构,4-2分料装置,4-3收集装置,5-1良品,5-2端面钻偏莲子,5-3腰部钻偏莲子,5-4重复钻孔莲子,5-5钻破莲子,5-6未加工莲子,5-7未钻通莲子,6-1去心孔洞的深度学习识别框,6-2莲子整体的深度学习识别框,1-1-1滚子,1-1-2支撑板,1-5-1抓料盘,1-5-2料斗,1-5-3下料管,4-1-1喷嘴,4-2-1管道。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。
28.如图1-图5所示,本发明一种莲子去心加工疵品分选装置,包括莲子输送系统1、图像采集系统2、分选控制系统3、分选执行系统4等部分,其中,莲子输送系统1包括滚子链传动系统1-1、机架1-2、电动机1-3、动力传动装置1-4、进料系统1-5等部分,滚子链传动系统1-1位于机架1-2上部;进料系统1-5位于滚子链传动系统1-1一端,可将莲子5逐颗间歇送往链条链节处;电动机1-3通过动力传动装置1-4驱动滚子链传动系统1-1和进料系统1-5工作;图像采集系统2位于滚子链传动系统1-1中部,包括相机支架2-1、检测相机2-2、辅助光源2-3等部分,相机视野朝向链条;滚子链传动系统1-1上部工作链条中的滚子1-1-1与链条下方布置的支撑板1-1-2相接触,使其在向前运动过程中可产生自转,进而带动落入链条两滚子1-1-1间的莲子5产生自转,莲子5开始转动后,在链条上完成滚正定向,使得各莲子5轴线方向调整为一致,并可在通过检测相机2-2视野时改变姿态,以在相机视野中充分展示表面特征;分选控制系统3包括控制器,控制器与图像采集系统2相连接,控制器所采用的深度学习算法,依据深度学习权重对进入检测相机2-2视野的莲子整体特征或者去心孔洞特征进行自动识别与分类,并由控制程序做出分选决策;深度学习权重是通过对预先准备的各
类去心加工莲子的外观图片数据集进行训练获得;分选执行系统4位于滚子链传动系统1-1另一端,包括剔除机构4-1、分料装置4-2、收集装置4-3等部分,其中,所述的剔除机构4-1可接受分选控制系统3的指令,对指定链条链节上的莲子去心加工疵品予以剔除;被剔除的莲子去心加工疵品经过分料装置4-2中的管道4-2-1落入收集装置4-3指定区域;良品则随滚子链传动系统1-1运动自然落入收集装置4-3对应区域。
29.如图3、图4中主、俯视图所示,本发明实施例分选控制系统3采用深度学习算法对图像采集系统2采集的莲子5表面的图片或视频信息进行自动处理,识别出莲子5经去心加工后在表面上留下的去心孔洞6特征,并根据莲子去心加工疵品和良品存在的去心孔洞6位置、数量、组合及外观特征差异进行分类,从而分选出去心良品5-1(沿莲子轴线钻通的莲子,俯视视野中无去心孔洞特征)及端面钻偏莲子5-2(钻孔轴线偏离莲子轴线,俯视视野中存在2个去心孔洞特征)、腰部钻偏莲子5-3(去心时莲子偏斜,钻孔轴线倾斜或近似垂直于莲子轴线,俯视视野中存在去心孔洞特征)、重复钻孔莲子5-4(莲子被重复去心,端面视野中存在多个孔洞特征)、钻破莲子5-5(去心孔洞周围莲仁发生崩碎)、未加工莲子5-6(莲子进入了去心工位,但未经过去心加工即出料,端面及俯视视野中表面均无孔洞)与未钻通莲子5-7(端面视野中莲子一端有孔,一端无孔,未贯通)等疵品,所述分选控制系统3根据莲子5分类结果控制分选执行系统4工作,根据需要将疵品予以剔除。
30.如图3所示,为实现分选,分选控制器可通过对莲子5上的去心孔洞6特征进行识别,获得去心孔洞6的深度学习识别框6-1,并进一步根据识别框6-1的位置、数量等特征进行分类;也可对包含去心孔洞6在内的莲子整体进行识别,获得莲子整体的深度学习识别框6-2,直接进行分类。
31.如图2所示,所述图像采集系统2包括一台或多台沿不同方位布置的检测相机2-2,以根据所分选疵品的类型获取所需莲子外观特征信息(对于端面钻偏莲子、腰部钻偏莲子或钻破莲子等,需提取莲子圆周表面外观特征信息,对于端面钻偏莲子、重复钻孔莲子或未钻通莲子等,需获取莲子端面外观特征信息,对于未加工的莲子,需获取周面和端面外观特征信息)。
32.如图1所示,所述进料系统1-5包括抓料盘1-5-1、料斗1-5-2、下料管1-5-3等部分;其中抓料盘1-5-1上开有若干容料槽,可间歇地从料斗中1-5-2逐颗取出莲子5,并通过下料管1-5-3向链节处送料。
33.如图3所示,所述滚子链传动系统1-1链条中的滚子1-1-1具有凹槽型截面,可限制莲子5在链条上仅绕自身轴线回转;相邻两滚子1-1-1之间形成的空间恰好能容纳一颗莲子5。
34.如图5所示,所述剔除机构4-1包括多个沿链条运行方向布置的喷嘴4-1-1,所述喷嘴4-1-1通过支架安装于机架1-2上,所述喷嘴4-1-1通过喷气将莲子去心加工疵品分类剔除;所述分料装置4-2具有多个管道4-2-1,可供不同类型莲子去心加工疵品下料。
35.如图1-图5所示,所述的一种莲子去心加工疵品分选装置在工作时,莲子5由料斗1-5-2经下料管1-5-3落入滚子链条链节处,并随链条向前运动;莲子5在链条向前运动过程中完成摆正;随后莲子进入检测相机2-2视野并改变自身姿态,图像采集系统2获取到包含莲子5的图片或视频信息,随后由分选控制系统3通过深度学习算法识别出莲子5表面的去心孔洞6特征信息,并由控制程序根据识别的去心孔洞6的位置、数量、组合及外观特征差异
做出分选决策;或者由深度学习算法根据包含去心孔洞6特征在内的莲子整体特征直接进行识别分类;莲子5随链条继续运动,到达剔除机构4-1位置时,分选控制系统3向分选执行系统4发送指令,疵品被相对应的喷嘴4-1-1吹出,并经过分料装置4-2中的管道4-2-1落入收集装置4-3指定区域;良品则随滚子链传动系统1-1运动自然落入收集装置4-3对应区域,完成分选过程。
36.以上为对本发明实施例的描述,通过实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员而言将是显而易见的。本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1