一种芯片模组分拣装置的制作方法
1.本技术涉及自动化设备,尤其涉及一种芯片模组分拣装置。
背景技术:
2.当前芯片模组切换或封装后,排放在托盘中,对这些芯片模组分拣大都通过在流水线上设置光学检测工位,在该工位依靠人工将托盘放置在光学检测装置上,检测完再取出托盘,然后进行下一托盘的分拣。若检测出有不良时,人工取出,该方式下依靠人工操作,效率不高,因芯片模组尺寸小不良拿取时极容易取错,这样整体上经济效率低。
3.因此,需要改进现有的对芯片模组的分拣方式。
技术实现要素:
4.为克服上述缺点,本技术提供一种高效的自动的芯片模组分拣装置。
5.为了达到以上目的,本技术采用如下技术方案:
6.一种芯片模组分拣装置,其特征在于,包括:
7.基座,所述基座上配置有底板,
8.所述底板上配置有:上料单元、装料单元、扫描检测单元及移载组件,
9.所述上料单元内层叠复数呈托盘,每个托盘内有待分拣的芯片模块,
10.所述装料单元,所述装料单元用以收纳托盘,
11.所述传输模块包括直线驱动部,其介于上料单元与装料单元之间,
12.所述扫描检测单元及移载组件固定于支架上,所述支架与直线驱动部垂直,所述扫描检测单元用于扫描待分拣的芯片模组并将扫描信息传输至控制部,所述移载组件用以接收并响应控制部的指令将托盘中的不良品吸出,
13.所述传输模块用于将上料单元的托盘传输至装料单元。这样可利用装置自动的进行芯片模组分拣,效率高。
14.优选的,该扫描检测单元,包括:
15.第一y轨模组,其安装于所述支架上,所述第一y轨模组的输出端连接第一端板,所述第一端板的远离第一y轨模组侧上安装有相机模块,基于控制部的控制第一y轨模组动作,带动所述相机模块移动,所述相机模块移动以扫描位于扫码区的托盘上芯片模块,并将扫描结果反馈至控制部。
16.优选的,该移载组件包括:第二y轨模组,其安装于所述支架上,
17.所述第二y轨模组连接第二端板,所述第二端板的远离第二y轨模组侧上安装有z轴模组,所述z轴模组的远离第二端板侧的配置有吸嘴,所述吸嘴用以吸取托盘上的芯片模块。
18.优选的,该第二y轨模组与支架上的第一y轨模组平行。
19.优选的,该传输模块包括:
20.直线驱动部及s轴,
21.基于直线驱动部的驱动带动其上的托盘移动。
22.优选的,该直线驱动部为直线电机。
23.优选的,该直线驱动部包括丝杆,其一侧连接电机,基于所述电机的驱动带动丝杆旋转,丝杆旋转带动滑块移动进而带动托盘移动。
24.优选的,该上料单元包括:上料仓,所述上料仓上安装有分盘机构,通过所述分盘机构逐一将待分拣的托盘放下。
25.有益效果
26.本技术提出的芯片模组分拣装置,其可高效的进行芯片模块分拣,提高作业效率。
附图说明
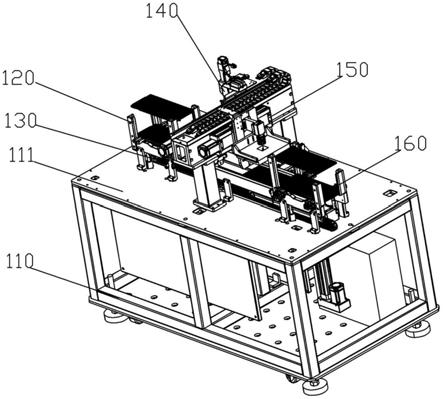
27.图1为本技术实施例的芯片模组分拣装置的立体结构示意图;
28.图2-图4为本技术实施例的芯片模组分拣装置的内部结构示意图;
29.图5为本技术实施例的芯片模组分拣装置的扫描检测单元的结构示意图;
30.图6为本技术实施例的不良品移载的结构示意图;
31.图7为本技术实施例的装料单元的结构示意图。
具体实施方式
32.以下结合具体实施例对上述方案做进一步说明。应理解,这些实施例是用于说明本技术而不限于限制本技术的范围。实施例中采用的实施条件可以如具体厂家的条件做进一步调整,未注明的实施条件通常为常规实验中的条件。
33.本技术实施方式提出一种芯片模组分拣装置(下称分拣装置),该芯片模组分拣装置包括:
34.基座及配置于基座上的壳体,基座上配置有底板,该底板上配置有:
35.上料单元,该上料单元内层叠复数呈托盘,每个托盘内有待分拣的芯片模块,料单元的一侧配置有传输模块,芯片模块扫描检测单元,其用以扫描托盘上模块,并将扫描将反馈至控制部,控制部电性连接移载组件,移载组件用以将判断为ng的模块吸出,并放置于待处理品托盘中,承载良品的托盘经传输模块传输至装料单元中,在装料单元中内装载至预设层数的托盘时提醒操作人员及时取出。通过该分拣装置实现芯片模组的快速高效的分拣。
36.接下来请参考图1至图7来详细描述本技术实施方式的芯片模组分拣装置。
37.如图1所示为本技术实施例的芯片模组分拣装置的立体结构示意图,
38.基座110及配置于基座110上的壳体101,基座110内配置有控制部(图未示),该控制部用以控制芯片模组分拣装置的运行。
39.接下来结合图2-图7来描述芯片模组分拣装置的内部结构,
40.基座110上配置有底板111,该底板111上配置有:
41.上料单元120,该上料单元120内层叠复数呈托盘,每个托盘内放置有待分拣的芯片模块,
42.上料单元120的一侧配置有传输模块130,该传输模块130将待分拣的托盘传输至扫码区,
43.芯片模块扫描检测单元140,其包括:
44.支架144,该支架144配置于传输模块130的上方侧,且与传输模块130垂直(或大致垂直)。该支架144上配置有第一y轨模组143,第一y轨模组143的输出端连接第一端板141,端板141的远离第一y轨模组143侧上安装有相机模块142(如,ccd相机),基于控制部(图未示)的控制第一y轨模组143运动带动相机模块142移动,相机模块142移动的同时扫描扫码区的托盘上200的待分拣的芯片模块210,并将扫描结果反馈至控制部。
45.该支架144上还配置有第二y轨模组154,该第二y轨模组154连接第二端板153,第二端板153的远离第二y轨模组154侧上安装有z轴模组153,z轴模组153的远离第二端板153侧的配置有吸嘴151,该吸嘴151用以吸取托盘上被判断为ng的芯片模块。吸取时,基于控制部的控制第二y轨模组154和/或z轴模组153移动、吸嘴151吸取ng的芯片模块,并放置于待处理品托盘170中。该待处理品托盘170匹配有移动模组,这样托盘中方满不良品时,基于该移动模组移动托盘170,放置孔托盘。
46.该传输模块130包括:直线驱动部131及s轴132,基于直线驱动部131的驱动带动其上的托盘移动,将上料单元120中的托盘传输至扫码区,在扫码区经相机模块142扫描判断有不良品时移动至移栽区,经移载组件150的吸嘴151吸出不良品,吸出后托盘传输至装料单元160,在装料单元160中内装载至预设层数的托盘时提醒操作人员及时取出。通过该分拣装置实现芯片模组的快速高效的分拣。
47.该上料单元120包括:上料仓123,该上料仓123上安装有分盘机构124,通过该分盘机构124逐一将待分拣的托盘放下,并传输至换料区180。该上料单元采用人工放料的方式将待分拣的托盘放置于该上料单元内,分拣时经分盘机构124逐一放出。
48.该上料单元120还包括:z轴电缸121,其输出端连接至中间部件125,中间部件125上配置有复数支杆126,支杆126上配置有直线轴承122,该直线轴承122连接承载板,放料时托盘放于承载板上,基于驱动z轴电缸121下移,托盘放于直线驱动部131上,直线驱动部131动作带动托盘移动。该直线驱动部131可为直线电机或丝杠与电机的匹配的直线驱动。
49.该装料单元160包括:收料仓163,该收料仓163上配置有分盘机构164,分盘机构164用以逐一收纳托盘200。z轴电缸161,其上连接有直线轴承162。
50.上述实施例只为说明本技术的技术构思及特点,其目的在于让熟悉此项技术的人是能够了解本技术的内容并据以实施,并不能以此限制本技术的保护范围。凡如本技术精神实质所做的等效变换或修饰,都应涵盖在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1