一种用于识别与筛分不同形态特征集料颗粒的模块化设备的制作方法
1.本发明属于公路工程,涉及一种用于识别与筛分不同形态特征集料颗粒的模块化设备。
背景技术:
2.公路沥青路面施工过程中,混合料用粗集料对针片状、破碎状颗粒含量要求较为严格。集料颗粒的形状特征、级配,对沥青混合料性能及路用寿命有着重要的影响。根据公路沥青路面施工技术规范,确定集料中针片状、破碎状颗粒占比的方法为,采用游标卡尺测量、逐颗目测判断,统计并计算粗集料颗粒中针片状、破碎状颗粒的含量。这种方法,统计集料中不同形状颗粒占比的效率与精度较低,不能快速、准确的计算出路用集料中不同形状、粒径颗粒的百分比。
3.基于上述公路沥青路面施工过程中,确定不同形状颗粒占比所遇到的困难,本发明从混合料集料形态特征与粒径分布出发,提出一种用于识别与筛分不同形态特征集料颗粒的模块化设备。
技术实现要素:
4.本发明提出了一种用于识别与筛分不同形态特征集料颗粒的模块化设备,用于沥青路面施工现场,识别筛分集料场中不同粒径、形状的颗粒,其目的在于快速、准确分类、计算集料中不同粒径、形状的颗粒及其在集料中的百分比。
5.本发明解决其技术问题,所采用的技术方案为:
6.一种用于识别与筛分不同形态特征集料颗粒的模块化设备,包括:输料系统、筛分系统、传输系统、3d激光扫描系统、图像采集与处理系统、集料筛选系统,所述输料系统包括骨料仓和传送带a,所述筛分系统包括套筛、振动台和输料仓,所述传输系统包括传感器与传送履带,所述3d激光扫描系统包括3d激光扫描仪、激光接收靶、支撑框架,所述图像采集与处理系统包括图像采集设备与支撑框架b,所述集料筛选系统包括分拣器与储料仓;所述输料系统将原始集料,输送至筛分系统中,筛分系统通过输料仓,分别将不同档位的集料颗粒,输送至传输运送系统中;所述传输系统的传送履带,将集料颗粒运送至3d激光扫描系统、图像采集与处理系统、集料筛选系统中,用于构建集料颗粒三维模型、图像采集与处理,并筛选不同形状特征的集料颗粒,并将其投入不同储料箱中。
7.所述3d激光扫描系统包括3d激光扫描仪、激光接收靶、支撑框架a,所述3d激光扫描仪位于支撑框架a上,可通过支撑框架a上的传送带,移动、旋转调整位置,构建集料的三维模型,用于后期分析与处理。
8.所述3d激光扫描仪构建的不同集料颗粒的三维模型,用于检测、计算不同形状集料颗粒的长、宽、厚,其中集料颗粒的长为所构建三维模型中的最长轴l,宽为垂直于长所在方向的最长轴,为三维模型中的次长轴w,厚为垂直于长、宽所在方向的最长轴,为三维模型中的最短轴t;
9.所述检测、计算出不同形状集料颗粒的长、宽、厚,用于确定集料颗粒的针、片状系数,当集料颗粒l/w≥3时,定义为针状颗粒,当集料颗粒w/t≥3时,定义为片状颗粒。
10.所述图像采集与处理系统包括图像采集设备与支撑框架b,所述图像采集设备位于支撑框架b上,可通过支撑框架b上的传送带、支撑架,移动、旋转调整位置,获取不同角度下,集料颗粒的截面,并计算不同集料颗粒的截面面积。
11.所述3d激光扫描仪构建的不同集料颗粒的三维模型,用于检测、计算集料颗粒破碎面的投影面积,将所构建的三维模型,三角网格化处理、简化构建模型、边缘检测处理,检测集料颗粒破碎面边缘,获取、计算破碎面轮廓在不同角度下投影的最大面积,并记录为xi(i=1,2,3,...,n),所述图像采集设备,统计、计算同一集料颗粒,不同角度下获取的最大截面面积a;当集料颗粒xi/a≥1/4时,定义为破碎状颗粒;对于同一集料颗粒,记录符合xi/a≥1/4要求破碎面的数量,作为分拣器筛选集料颗粒的前提条件。
12.所述传送履带下方,配备记录集料颗粒位置的传感器,结合3d激光扫描系统,用于捕获不同时段内集料颗粒在传送履带上的位置信息,并配和集料筛选系统,筛选不同形状的集料颗粒。所述集料筛选系统包括分拣器与储料箱,所述分拣器将针片状、破碎状颗粒筛出,并投入不同储料箱中;在筛选的过程中,首先筛选出针、片状颗粒,分别投入储料箱c、a中,再筛选出没有或者具有一个符合要求破碎面的集料颗粒,分别投入储料箱d、b中,最后传送履带将具有两个或两个以上符合要求破碎面的集料颗粒,运送至储料箱e中。在整个识别、筛分集料颗粒的过程中,3d激光扫描系统、图像采集与处理系统、集料筛选系统各有两套,分拣器共有八台,用于二次识别、筛分集料颗粒,以提高筛分的效率与精度。
13.与现有技术相比,本发明的有益效果是:
14.1.本发明模块化筛分设备,采用振动台,结合标准套筛筛分集料颗粒,将不同粒径的集料颗粒排入不同规格的号筛中,再分批次输送、挑选、分类同一粒径集料颗粒中不同形状的颗粒,提高了3d激光扫描、图像采集与处理系统识别、分类不同形状颗粒的精度与效率。
15.2.本发明模块化筛分设备,采用3d激光扫描系统,批量构建集料颗粒的三维模型,计算不同集料颗粒的针、片状系数,并采用分拣器批量挑选出针、片状系数大于等于3的集料颗粒,提高了筛选针片状集料颗粒的效率与精度。
16.3.本发明模块化筛分设备,采用图像处理技术,批量构建集料颗粒的三维模型,精确计算出集料颗粒所含符合要求破碎面数量,并采用分拣器批量挑选、分类不同数量符合要求破碎面的集料颗粒,提高了筛选不同种类破碎状集料颗粒的效率与精度,便于沥青路面施工设计,提高铺筑沥青路面的工程质量。
17.4.本发明模块化筛分设备,二次扫描、构建集料颗粒三维模型,二次筛选针片状颗粒、破碎状颗粒,提高了识别、分类集料颗粒的效率与精度。
附图说明
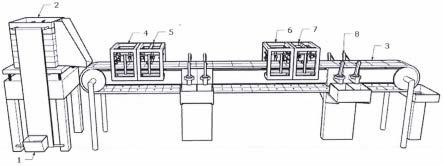
18.图1为本发明模块化筛分设备不同系统示意图;
19.图2为本发明模块化筛分设备输料系统及筛分系统示意图;
20.图3为本发明模块化筛分设备3d激光扫描系统;
21.图4为本发明模块化筛分设备图像采集与处理系统示意图;
22.图5为本发明模块化筛分设备传输系统前视图;
23.图6为本发明模块化筛分设备传输系统后视图;
24.图7为本发明模块化筛分设备储料系统a示意图;
25.图8为本发明模块化筛分设备储料系统b示意图;
26.图9为本发明模块化筛分设备套筛示意图;
27.图10为本发明图像采集与处理系统所采集的集料颗粒二维图像;
28.图11为本发明图像采集与处理系统处理后的集料颗粒二维图像;
29.图12为本发明3d激光扫描系统简化处理后的三维集料颗粒模型;
30.图13为本发明3d激光扫描系统边缘检测处理后的三维集料颗粒模型;
31.图14为本发明3d激光扫描系统所检测集料颗粒的三维模型。
32.图中,1-输料系统,2-筛分系统,3-传输系统,4-3d激光扫描系统a,5-图像采集与处理系统a,6-3d激光扫描系统b,7-图像采集与处理系统b,8-集料筛选系统,9-套筛,10-输料仓,11-传送带a,12-骨料仓,13-振动台,14-3d激光扫描仪,15-支撑框架a,16-传送带b,17-激光接收靶,18-图像采集设备,19-支撑框架b,20-传送带c,21-分拣器a,22-分拣器b,23-分拣器c,24-分拣器d,25-传感器,26-传送履带,27-储料系统a,28-储料系统b,29-储料系统c,30-储料箱a,31-储料箱b,32-储料箱c,33-储料箱d,34-排料器,35-出料口,36-储料箱e,37-出料口b,38-排料器b,39-排料器c,40-球形关节,41-集料阀门,42-破碎面1,43-破碎面2,44-破碎面3,45-破碎面4,46-破碎面5,47-边缘检测破碎面1,48-边缘检测破碎面2,49-边缘检测破碎面3,50-边缘检测破碎面4,51-边缘检测破碎面5,52-集料颗粒的长,53-集料颗粒的宽,54-集料颗粒的厚。
具体实施方式
33.下面结合附图1到14,表1到2以及技术方案对本发明作进一步详细说明。
34.如图1所示,本发明专利一共包括输料系统1、筛分系统2、传输系统3、4-3d激光扫描系统a、5-图像采集与处理系统a、6-3d激光扫描系统b、7-图像采集与处理系统b、集料筛选系统8等八个系统。下面结合一个实例,阐述本发明专利的工作原理。
35.如图2、9所示,本发明模块化筛分设备的输料系统1及筛分系统2包括套筛9、输料仓10、11-传送带a、骨料仓12、振动台13等五台工作设备。通过骨料仓12及11-传送带a,将破碎过后的集料颗粒,运送至套筛9中,振动台13振动套筛9,筛分集料颗粒。完成集料颗粒筛分工作后,打开集料阀门41,39-排料器c将某一粒径集料颗粒排入输料仓10中,排料器c上,安装有球形关节40,排料器39依靠球形关节40可在套筛9内灵活移动,便于排出集料。
36.如图3所示,本发明模块化筛分设备的3d激光扫描系统,可扫描、构建集料的三维模型,并进行三角网格处理、简化集料颗粒的三维模型,如图14所示。在所有建构的三维模型中,检测集料颗粒不同网格两点之间的距离,将距离最大的两点确定为集料颗粒的最长轴l,沿集料颗粒最长轴l方向,垂直切割集料n次,并搜索、构建所切割截面的最小外接矩形,并将外接面积最大矩形的长作为集料颗粒的次长轴w,宽作为集料颗粒的最短轴t,最后构建集料颗粒三维模型的最小外接长方体,如图14所示。所检测、计算出不同形状集料颗粒的长、宽、厚,用于确定集料颗粒的针、片状系数,当集料颗粒l/w≥3时,定义为针状颗粒,当集料颗粒w/t≥3时,定义为片状颗粒。
37.如图5、6所示,本发明模块化筛分设备传输系统包括传感器25和传送履带26,传送履带26可以将集料颗粒运送至4-3d激光扫描系统a、5-集料筛选系统a所工作的区域。在传送履带26不同区域下方,设置了多块传感器25,配合4-3d激光扫描系统a,可记录集料颗粒的不同时刻所处的位置。4-3d激光扫描系统a包括3d激光扫描仪14,15-支撑框架a,16-传送带b,激光接收靶17。3d激光扫描仪14,通过15-支撑框架a和16-传送带b多方位扫描集料颗粒,激光接收靶17接收3d激光扫描仪14获取的数字信息,构建集料颗粒三维模型,并结合传感器25获取集料颗粒的位置信息,并捕获针、片状系数值大于或等于“3”的集料颗粒所在的空间位置。集料筛选系统8包括分拣器和储料仓,分拣器21、23、22、24配合4-3d激光扫描系统a、传感器25和传送履带26,分别将针状颗粒投入32-储料箱c中,片状颗粒投入30-储料箱a中,将没有符合要求破碎面的集料颗粒投入33-储料箱d中,将具有一个符合要求破碎面的集料颗粒投入31-储料箱b中。在传输系统上,一共有两台3d激光扫描系统、两台图像采集与处理系统、八台分拣器,可二次识别、分类集料颗粒。待分拣器将针、片状颗粒,没有或者具有一个符合要求破碎面的颗粒,分别投入不同的储料箱后,传送履带26将集料中具有两个或者两个以上符合要求破碎面的集料颗粒,运送至29-储料箱e中。
38.如图4所示,本发明模块化筛分设备的图像采集与处理系统,可扫描、记录,不同角度下集料颗粒截面,如图10所示。对所记录不同集料颗粒的截面,进行二值化处理,边缘检测集料颗粒截面,计算集料颗粒截面面积。对于同一集料颗粒,图像采集设备18可依附20-传送带c及19-支撑框架b移动,不同角度下获取的截面面积,并记录该集料颗粒最大的截面面积a。3d激光扫描系统,所扫描、构建的集料颗粒三维模型,调整不同检测区域面积、曲率,边缘检测出集料颗粒不同破碎面的位置及轮廓,如图12、13所示。对于同一集料颗粒,利用不同破碎面的位置及轮廓,投影、计算出不同破碎面轮廓的最大投影面积,作为集料颗粒破碎面的投影面积xi,当xi/a≥1/4时,判断该集料颗粒为破碎状颗粒。对于同一集料颗粒,记录符合xi/a≥1/4要求破碎面的数量,作为分拣器筛选集料颗粒的前提条件。4-3d激光扫描系统a、5-图像采集与处理系统a,结合传感器25,用于记录针状、片状、没有或者具有一个符合要求破碎面、两个或两个以上符合要求破碎面集料颗粒在传送履带26上的位置。6-3d激光扫描系统b、7-图像采集与处理系统b,与4-3d激光扫描系统a、5-图像采集与处理系统a,所具备的功能相同,可以二次识别、分类集料颗粒的形状,结合位于后方的四台分拣器,可以二次挑选集料颗粒,以提高识别、分类集料颗粒的效率与精度。
39.如图7、8所示,每一台储料箱配置有一个出料口35与排料器34,待分拣器将不同形态特征的集料颗粒投入储料箱后,打开储料口35,排料器34将储料箱内的集料颗粒排出,27-储料仓a、28-储料仓b、29-储料仓c具有一定高度,便于运输车运输不同储料箱内的集料颗粒。如图2、9所示,振动台13,振动套筛9,完成筛分集料颗粒。在每一个号筛上配备有一个39-排料器c和集料阀门41,待集料颗粒筛分完成后,打开集料阀门41,排料器40将集料颗粒排出,通过输料仓10,将集料颗粒运输至传送履带26上。
40.本发明确定混合料集料中针片状颗粒、破碎状颗粒含量,以及破碎状颗粒破碎面数量,参照《公路工程集料试验规程》(jtg e42-2005)。此外,《公路沥青路面施工技术规范》(jtg f40-2004)规定新建公路,表面层、中下面层、基层集料的针片状颗粒、破碎状颗粒含量及要求,如表1和表2所示。
41.表1 沥青混合料用粗集料对针片状颗粒含量要求
[0042][0043]
表2 沥青混合料用粗集料对破碎面的要求
[0044][0045]
参照公路沥青路面施工技术现状及规范,集料中形状为针状、片状、没有或者具有一个符合要求破碎面的颗粒占比较低,而具有两个或两个以上符合要求破碎面颗粒占比较大。因此,本发明采用分拣器,首先将形状为针状、片状、没有或者具有一个符合要求破碎面的集料颗粒,投入不同储料箱中,采用传送履带,将具有两个或两个以上符合要求破碎面颗粒运送至储料箱e中,提高分类与输送集料颗粒的效率及精度。
[0046]
利用本发明所述技术方案,或本领域的技术人员在发明技术方案的启发下,设计出类似的技术方案,而达到上述技术效果,均是落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1