一种非停靠式分拣机器人分拣装置及分拣方法与流程
1.本发明涉及分拣技术领域,尤其涉及一种非停靠式分拣机器人分拣装置及分拣方法。
背景技术:
2.分拣机器人(sorting robot),是一种具备了传感器、物镜和电子光学系统的机器人,可以快速进行货物分拣。
3.分拣机器人大多采用与传送带配合分拣或者利用机器人自身的机械臂进行分拣,然而无论是利用传送带还是利用机械臂分拣,都要消耗大量电力,尤其是利用机械臂搬运货物,将重物抬起并放置在传送带或者运输车上,需要设计功能复杂的机械臂,成本也因此提高,因此,亟需一种分拣装置进行初步筛选,分担分拣机器人的负担,并且对电力的消耗控制在适用范围内的装置。
技术实现要素:
4.本发明的目的是为了解决现有技术中的问题,而提出的一种非停靠式分拣机器人分拣装置及分拣方法。
5.为了实现上述目的,本发明采用了如下技术方案:一种非停靠式分拣机器人分拣装置,包括滑道和固定在其两侧的边板,所述滑道上开设有下槽,其中一个所述边板外壁设置有动力装置和变速盒,所述变速盒固定在边板侧壁,所述下槽内侧壁等距离转动连接有多个轮轴,所述轮轴上设置有多个滑轮,所述轮轴贯穿至变速盒内,所述动力装置的输出端连接有同步组件,所述同步组件与变速盒连接,所述滑轮处设置有变向组件。
6.在上述的非停靠式分拣机器人分拣装置中,所述同步组件包括贯穿转动连接在变速盒侧壁的多根同步轴,所述同步轴上固定连接有同步轮,多个所述同步轮共同套设有同步带。
7.在上述的非停靠式分拣机器人分拣装置中,所述变速盒内设置有多个相同的变速单元,所述变速单元包括可受外界信号控制伸缩的推杆,所述轮轴位于变速盒内的部分固定连接有摩擦板和输出齿轮,所述同步轴位于变速盒内的部分固定连接有动力板,所述同步轴外间隙套设有与变速盒固定的支撑管,所述支撑管上固定连接有输入齿轮,所述变速盒内部转动连接有与同步轴垂直的齿轮轴,所述齿轮轴上固定连接有第一中间齿轮和第二中间齿轮,所述第一中间齿轮、第二中间齿轮、输入齿轮、输出齿轮均为锥齿轮。
8.在上述的非停靠式分拣机器人分拣装置中,所述动力板的周向侧壁开设有环形槽,所述推杆的输出端固定连接有卡杆,所述卡杆滑动连接在环形槽内。
9.在上述的非停靠式分拣机器人分拣装置中,所述变向组件包括内板,所述轮轴上开设有轮孔,所述内板转动连接在轮孔内,所述滑轮包括内轮和外轮,所述外轮内壁开设有外槽,所述内轮的外壁开设有内槽,所述内槽的内壁固定连接有张紧弹簧,所述张紧弹簧上固定连接有卡块,所述张紧弹簧伸长时卡块同时与内槽、外槽卡接,所述张紧弹簧收缩时卡
块不与外槽接触。
10.在上述的非停靠式分拣机器人分拣装置中,所述轮轴上还开设有转向槽,所述内板上固定连接有转向杆,所述转向杆活动连接在转向槽内,所述内板的侧壁对称固定连接与两个转向弹簧,所述转向弹簧远离内板的一端固定连接在轮轴的轮孔内壁。
11.一种非停靠式分拣机器人分拣方法,包括以下步骤:
12.s1、通过无线信号将推杆以及转向弹簧的电源控制开关与外界控制器电性连接;
13.s2、启动电机使其通过同步带驱动各个同步轴同步转动,将待分拣的包裹放置于滑道上;
14.s3、出现包裹需减速用于详细检查时,控制推杆使其伸长,动力板将动力反向传递至输出齿轮,使得包裹减速;
15.s4、需使包裹侧向运输至某个分支滑道时,控制推杆使其不与输出齿轮以及输入齿轮接触,从而使得滑轮失去动力;控制转向弹簧使得滑轮转向,从而使得包裹变向滑道至分支滑道。
16.与现有的技术相比,本发明的优点在于:
17.1、当需要对某个包裹进行减速时,该包裹所在位置的推杆使其伸长,动力板与输入齿轮脱离接触,此时对应位置的轮轴失去动力,无法持续驱动包裹移动;若需对某个包裹进行更大程度的减速,则控制推杆使其伸长,动力板直接与摩擦板接触,即为动力板将动力反向传递至输出齿轮,使得包裹更快地减速,便于工作人员对包裹进行检查;
18.2、在需使包裹侧向运输至某个分支滑道时,控制推杆使得滑轮失去动力;再控制转向弹簧的电源使其通电使内板偏转,通过转向杆带动内轮偏转;同时由于转向弹簧通电产生磁吸力使得卡块与外槽脱离接触,又由于内轮带动外轮同步偏转,故而整个滑轮呈现偏斜的效果,在其上滑过的包裹则会收到侧向的摩擦力从而产生转向的效果,最终使得包裹穿过侧孔进入分支滑道,完成对包裹的分拣,无需使用机械臂搬运货物,电力消耗得到有效控制。
附图说明
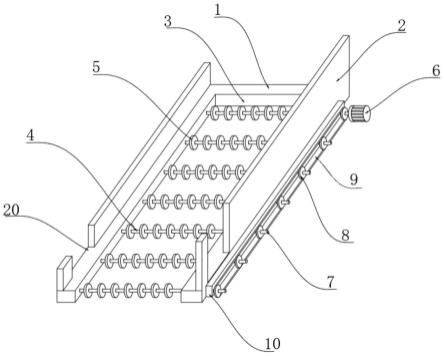
19.图1为本发明提出的一种非停靠式分拣机器人分拣装置的结构示意图;
20.图2为本发明提出的一种非停靠式分拣机器人分拣装置中滑轮部分的剖切示意图;
21.图3为本发明提出的一种非停靠式分拣机器人分拣装置中变速盒部分的放大示意图;
22.图4为本发明提出的一种非停靠式分拣机器人分拣装置中滑轮的结构示意图。
23.图中:1滑道、2边板、3下槽、4轮轴、5滑轮、6电机、7同步轴、8同步轮、9同步带、10变速盒、11摩擦板、12动力板、13输入齿轮、14第一中间齿轮、15第二中间齿轮、16输出齿轮、17支撑管、18推杆、19卡杆、20侧孔、51内轮、52外轮、53内槽、54外槽、55卡块、56张紧弹簧、57内轴、58内板、59转向弹簧、510转向槽、511转向杆。
具体实施方式
24.以下实施例仅处于说明性目的,而不是想要限制本发明的范围。
25.实施例
26.参照图1-4,一种非停靠式分拣机器人分拣装置及分拣方法,包括滑道1和固定在其两侧的边板2,滑道1的侧壁开设有侧孔,侧孔处连接分支滑道1,滑道1上开设有下槽3,其中一个边板2外壁设置有动力装置和变速盒10,变速盒10固定在边板2侧壁,下槽3内侧壁等距离转动连接有多个轮轴4,轮轴4上设置有多个滑轮5,轮轴4贯穿至变速盒10内,动力装置的输出端连接有同步组件,同步组件包括贯穿转动连接在变速盒10侧壁的多根同步轴7,同步轴7上固定连接有同步轮8,多个同步轮8共同套设有同步带9,电机6工作驱动同步轴7转动,同步轴7上的同步轮8随其同步转动,从而通过同步带9带动各个同步轮8同步转动,正常状态下,各个输入齿轮13均与对应位置的动力板12相抵,同步轴7的动力传递至输入齿轮13再经两个中间齿轮传递至输出齿轮16,进而带动轮轴4转动,从而驱动滑道1上放置的包裹移动。
27.变速盒10内设置有多个相同的变速单元,变速单元包括可受外界信号控制伸缩的推杆18,轮轴4位于变速盒10内的部分固定连接有摩擦板11和输出齿轮16,同步轴7位于变速盒10内的部分固定连接有动力板12,同步轴7外间隙套设有与变速盒10固定的支撑管17,支撑管17上固定连接有输入齿轮13,变速盒10内部转动连接有与同步轴7垂直的齿轮轴,齿轮轴上固定连接有第一中间齿轮14和第二中间齿轮15,第一中间齿轮14、第二中间齿轮15、输入齿轮13、输出齿轮16均为锥齿轮。动力板12的周向侧壁开设有环形槽,推杆18的输出端固定连接有卡杆19,卡杆19滑动连接在环形槽内,当需要对某个包裹进行减速时,该包裹所在位置的推杆18使其伸长,动力板12与输入齿轮13脱离接触,此时对应位置的轮轴4失去动力,无法持续驱动包裹移动;若需对某个包裹进行更大程度的减速,则控制推杆18使其伸长,动力板12直接与摩擦板11接触,即为动力板12将动力反向传递至输出齿轮16,使得包裹更快地减速。
28.同步组件与变速盒10连接,滑轮5处设置有变向组件。变向组件包括内板58,轮轴4上开设有轮孔,内板58转动连接在轮孔内,滑轮5包括内轮51和外轮52,外轮52内壁开设有外槽54,内轮51的外壁开设有内槽53,内槽53的内壁固定连接有张紧弹簧56,张紧弹簧56上固定连接有卡块55,张紧弹簧56伸长时卡块55同时与内槽53、外槽54卡接,张紧弹簧56收缩时卡块55不与外槽54接触,控制其中一个转向弹簧59的电源使其通电,该弹簧在通电时会在其各匝金属上产生同向磁场,该磁场会使各匝弹簧产生磁吸力,故而其会明显收缩,使得内板58偏转,通过转向杆511带动内轮511偏转。
29.轮轴4上还开设有转向槽510,内板58上固定连接有转向杆511,转向杆511活动连接在转向槽510内,内板58的侧壁对称固定连接与两个转向弹簧59,转向弹簧59远离内板58的一端固定连接在轮轴4的轮孔内壁,由于转向弹簧59通电产生了磁场,该磁场会对卡块66产生磁吸力,进而使得卡块55与外槽54脱离接触,即使得外轮52不再与内轮51同步转动,同时由于内轮51带动外轮52同步偏转,故而整个滑轮5呈现偏斜的效果,在其上滑过的包裹则会收到侧向的摩擦力从而产生转向的效果,最终使得包裹穿过侧孔20进入分支滑道1,完成对包裹的分拣。
30.一种非停靠式分拣机器人分拣方法,包括以下步骤:
31.s1、通过无线信号将推杆18以及转向弹簧59的电源控制开关与外界控制器电性连接;
32.s2、启动电机6使其通过同步带驱动各个同步轴7同步转动,将待分拣的包裹放置于滑道1上;
33.s3、出现包裹需减速用于详细检查时,控制推杆18使其伸长,动力板12将动力反向传递至输出齿轮16,使得包裹减速;
34.s4、需使包裹侧向运输至某个分支滑道1时,控制推杆18使其不与输出齿轮16以及输入齿轮13接触,从而使得滑轮5失去动力;控制转向弹簧59使得滑轮5转向,从而使得包裹变向滑道至分支滑道1。
35.本发明中,电机6工作驱动同步轴7转动,同步轴7上的同步轮8随其同步转动,从而通过同步带9带动各个同步轮8同步转动,正常状态下,各个输入齿轮13均与对应位置的动力板12相抵,同步轴7的动力传递至输入齿轮13再经两个中间齿轮传递至输出齿轮16,进而带动轮轴4转动,从而驱动滑道1上放置的包裹移动。
36.当需要对某个包裹进行减速时,该包裹所在位置的推杆18使其伸长,动力板12与输入齿轮13脱离接触,此时对应位置的轮轴4失去动力,无法持续驱动包裹移动;若需对某个包裹进行更大程度的减速,则控制推杆18使其伸长,动力板12直接与摩擦板11接触,即为动力板12将动力反向传递至输出齿轮16,使得包裹更快地减速。
37.在需使包裹侧向运输至某个分支滑道1时,控制推杆18使其不与输出齿轮16以及输入齿轮13接触,从而使得滑轮5失去动力;控制转向弹簧59使得滑轮5转向,从而使得包裹变向滑道至分支滑道1;
38.在控制转向弹簧59时,通过控制其中一个转向弹簧59的电源使其通电,该弹簧在通电时会在其各匝金属上产生同向磁场,该磁场会使各匝弹簧产生磁吸力,故而其会明显收缩,使得内板58偏转,通过转向杆511带动内轮511偏转;
39.同时由于转向弹簧59通电产生了磁场,该磁场会对卡块66产生磁吸力,进而使得卡块55与外槽54脱离接触,即使得外轮52不再与内轮51同步转动,同时由于内轮51带动外轮52同步偏转,故而整个滑轮5呈现偏斜的效果,在其上滑过的包裹则会收到侧向的摩擦力从而产生转向的效果,最终使得包裹穿过侧孔20进入分支滑道1,完成对包裹的分拣。
40.尽管本文较多地使用了1滑道、2边板、3下槽、4轮轴、5滑轮、6电机、7同步轴、8同步轮、9同步带、10变速盒、11摩擦板、12动力板、13输入齿轮、14第一中间齿轮、15第二中间齿轮、16输出齿轮、17支撑管、18推杆、19卡杆、20侧孔、51内轮、52外轮、53内槽、54外槽、55卡块、56张紧弹簧、57内轴、58内板、59转向弹簧、510转向槽、511转向杆等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本发明的本质;把它们解释成任何一种附加的限制都是与本发明精神相违背的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1