一种用于搬运机器人的分拣装置及方法与流程
本发明涉及物流仓储,更具体地涉及一种用于搬运机器人的分拣装置及方法。
背景技术:
1、随着科学技术与经济的发展,我国物流业正经历着由传统物流业向现代物流业的迅速转,将商品由原产地再到使用者之间的运输、保管、配送等各个环节的物流链都向着自动化、信息化、智能化、无人化的方向演进,在物流链条上,分类是最关键的一步,为了提高运输和配送效率,一般在物流体系中都会设立一个多层次的配送中心,例如一个商品要从商家所在地,经过多个物流中转站运输至当地的分拣中心,再从该分拣中心运送到目的地。
2、由于分拣中心需要24小时不间断作业,为了降低人工作业强度和人工数量,而使用一种搬运机器人进行搬运货品,现有的一般的分拣流程主要由包括传动部、分拣部、搬运部所组成,通过在一条流水线两侧设置多个分拣口,货品传到分拣员面前,分拣员根据订单上的对应区域号将其分配至相应的储物区,以待后续集中装车转运,这对于连续作业的分拣员而言容易造成视觉疲劳,出现视觉偏差而出现错误投递,进而延长了货品的运输时长,如何在控制一定成本的基础上,配合搬运机器人实现连续的、高效的、精准的分拣是需要解决的问题。
3、因此,亟需新的一种用于搬运机器人的分拣装置及方法。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明提供了一种用于搬运机器人的分拣装置及方法,以解决上述背景技术中存在的问题。
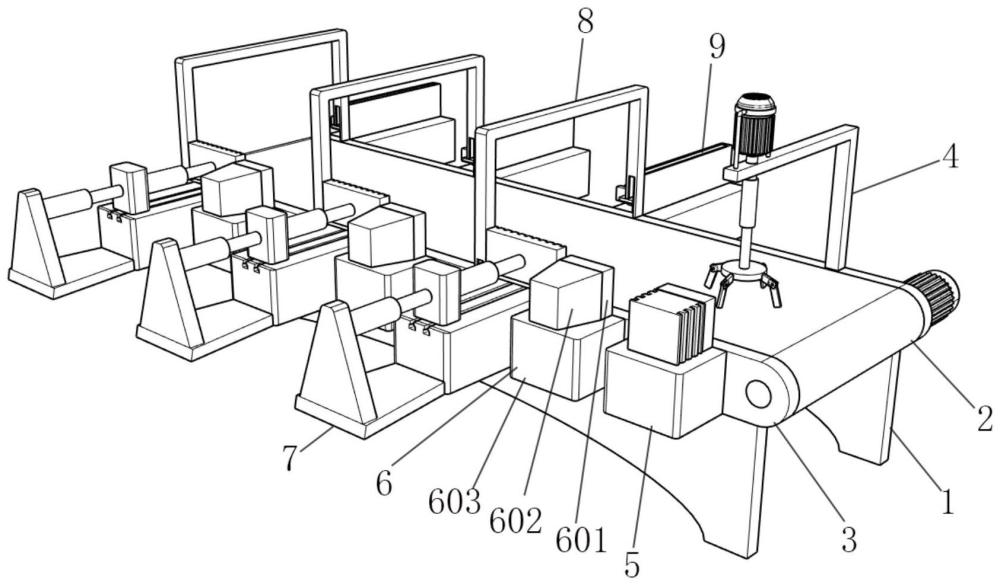
2、本发明提供如下技术方案:一种用于搬运机器人的分拣装置及方法,包括两个支撑底板,两个所述支撑底板的顶部均固定安装有侧板,两个所述侧板的内侧安装有传动机构,一个所述侧板的顶部安装有角度调节机构和等距排列的若干个限位机构,另一个所述侧板的顶部安装有角度判定机构和等距排列的若干个分类识别机构及推动机构的组合,若干个所述推动机构和限位机构之间安装有位于传动机构顶部的衔接机构;
3、所述角度判定机构包括条码捕获模块、数据激活模块、第二控制模块,所述条码捕获模块的安装位置与货品的条码所在高度保持水平;
4、所述角度调节机构包括l形支架,所述l形支架顶部的一端通过固定杆固定安装有制动电机,所述制动电机底部的输出轴通过联轴器固定套接有第一电动推杆,所述第一电动推杆底部的活动端固定安装有电动夹具;
5、所述条码捕获模块的输出端与数据激活模块的输入端进行电信连接,所述数据激活模块的输出端与第二控制模块的输入端进行电信连接,所述第二控制模块的输出端分别与制动电机、第一电动推杆以及电动夹具的输入端进行电信连接;
6、所述分类识别机构包括信息采集模块、编码校对模块以及第一控制模块,所述信息采集模块的安装位置与货品的条码所在高度保持水平;
7、所述推动机构包括第一底座,所述第一底座顶面的一侧活动连接有滑动块,所述滑动块的一侧固定安装有位于第一底座顶部的第二电动推杆,所述第二电动推杆的活动端固定安装有推板,所述滑动块的另一侧固定安装有第三电动推杆,所述第三电动推杆的固定端与尾板顶部的内侧进行固定连接,所述第一底座的内侧与侧板的外侧进行固定连接;
8、所述信息采集模块的输出端与编码校对模块的输入端进行电信连接,所述编码校对模块的输出端与第一控制模块的输入端进行电信连接,所述第一控制模块的输出端分别与第二电动推杆和第三电动推杆的输入端进行电信连接。
9、优选的,所述条码捕获模块靠近传动机构的一侧安装有雷达探测器,进而雷达探测器检测到障碍物体信号,进而激活开启角度判定机构,进而条码捕获模块对贴在货品外箱表面的条形码进行捕获,并将捕获结构不断输送至数据激活模块。
10、优选的,所述条码捕获模块设置为一种扫码器,利用发射出红外线光源,然后根据反射结果,利用芯片来译码,最后再返回条形码所代表的正确字符。
11、优选的,所述数据激活模块设置为字符接收单元,针对是否接收字符信息做出相应的指令操作,其中接收单元(接收器)是微波探测器的信号处理接收单元,接收由背景和探测对象反射的微波(源)信号,检测是否有都卜勒频率fd出现,产生探测器的指令输出。
12、优选的,所述编码校对模块设置为一个指定区域的条码字符库,通过将捕获采集的字符串与编码校对模块所具有的指定区域字符库进行比对,进行匹配判定。
13、优选的,所述限位机构包括第二底座,所述第二底座顶部的一侧固定安装有板座,所述第二底座顶部的另一侧安装有位于板座一侧的复位组件,所述板座的内腔活动连接有挡板。
14、优选的,所述复位组件包括固定片、弹簧、活动片以及固定快,所述固定片固定连接在第二底座的顶面,所述固定片通过弹簧与活动片进行传动连接,所述活动片的内侧通过固定快与挡板进行固定连接。
15、优选的,所述衔接机构包括u形管,所述u形管横跨传动机构的顶部且与传动机构两侧的侧板进行固定连接,所述u形管的内腔贯穿有绳索,所述绳索的一端与推板进行固定连接,所述绳索的另一端与活动片进行固定连接。
16、优选的,所述传动机构包括传送履带,所述传送履带包裹于等距横向排列的制动轴和若干个辊套表面,若干个所述辊套的内部均活动套接有辅动轴,所述制动轴和若干个辅动轴的两端均贯穿侧板的侧壁,所述制动轴的一端贯穿侧板侧壁后与步进电机的输出轴进行固定套接。
17、优选的,所述制动轴的两端贯穿侧板且与之进行活动套接,若干个所述辅动轴的两端贯穿侧板且与之进行固定套接,所述辊套活动套接于辅动轴的表面,具体为一种活动卡接的方式,即所述辅动轴的表面开设有凹槽,所述辊套活动套接在凹槽内,避免辊套在转动过程中发生偏移,且提高了传送履带的传动能力。
18、本发明的技术效果和优点:
19、1.本发明通过设有角度调节机构和角度判定机构,有利于通过条码捕获模块对贴在货品外箱表面的条形码进行捕获,在条码捕获模块未捕获条码信息时,角度判定机构中的数据激活模块被激活进而将这一信息输送至第二控制模块,进而第二控制模块控制角度调节机构进行货品的角度调节,直至货品的条码对准条码捕获模块的扫描端,进而条码捕获模块扫描到条码信息后将这一信息输送至数据激活模块,进而数据激活模块通过第二控制模块控制角度判定机构以及角度调节机构复位,进而为后续分类识别机构进行信息采集做准备,实现了货品位置的自动调整。
20、2.本发明通过设有分类识别机构和推动机构,有利于通过信息采集模块对贴在货品外箱表面的条码进行采集,并将条码上的区域序列号与编码校对模块中数据库的区域序列号进行校对归类,若与该数据库中的区域序列号匹配,则编码校对模块将激活第一控制模块,进而第一控制模块将该指令以电信号的形式输送至第二电动推杆,进而第二电动推杆控制推板将货品从传动机构的顶面推出,实现了实现连续的、高效的、精准的分拣。
技术特征:
1.一种用于搬运机器人的分拣装置及方法,包括两个支撑底板(1),其特征在于:两个所述支撑底板(1)的顶部均固定安装有侧板(3),两个所述侧板(3)的内侧安装有传动机构(2),一个所述侧板(3)的顶部安装有角度调节机构(4)和等距排列的若干个限位机构(9),另一个所述侧板(3)的顶部安装有角度判定机构(5)和等距排列的若干个分类识别机构(6)及推动机构(7)的组合,若干个所述推动机构(7)和限位机构(9)之间安装有位于传动机构(2)顶部的衔接机构(8);
2.根据权利要求1所述的一种用于搬运机器人的分拣装置及方法,其特征在于:所述条码捕获模块(501)靠近传动机构(2)的一侧安装有雷达探测器,进而雷达探测器检测到障碍物体信号,进而激活开启角度判定机构(5),进而条码捕获模块(501)对贴在货品外箱表面的条形码进行捕获,并将捕获结构不断输送至数据激活模块(502)。
3.根据权利要求1所述的一种用于搬运机器人的分拣装置及方法,其特征在于:所述条码捕获模块(501)设置为一种扫码器,利用发射出红外线光源,然后根据反射结果,利用芯片来译码,最后再返回条形码所代表的正确字符。
4.根据权利要求1所述的一种用于搬运机器人的分拣装置及方法,其特征在于:所述数据激活模块(502)设置为字符接收单元,针对是否接收字符信息做出相应的指令操作,其中接收单元(接收器)是微波探测器的信号处理接收单元,接收由背景和探测对象反射的微波(源)信号,检测是否有都卜勒频率fd出现,产生探测器的指令输出。
5.根据权利要求1所述的一种用于搬运机器人的分拣装置及方法,其特征在于:所述编码校对模块(602)设置为一个指定区域的条码字符库,通过将捕获采集的字符串与编码校对模块(602)所具有的指定区域字符库进行比对,进行匹配判定。
6.根据权利要求1所述的一种用于搬运机器人的分拣装置及方法,其特征在于:所述限位机构(9)包括第二底座(901),所述第二底座(901)顶部的一侧固定安装有板座(902),所述第二底座(901)顶部的另一侧安装有位于板座(902)一侧的复位组件(903),所述板座(902)的内腔活动连接有挡板(904)。
7.根据权利要求6所述的一种用于搬运机器人的分拣装置及方法,其特征在于:所述复位组件(903)包括固定片(9031)、弹簧(9032)、活动片(9033)以及固定快(9034),所述固定片(9031)固定连接在第二底座(901)的顶面,所述固定片(9031)通过弹簧(9032)与活动片(9033)进行传动连接,所述活动片(9033)的内侧通过固定快(9034)与挡板(904)进行固定连接。
8.根据权利要求7所述的一种用于搬运机器人的分拣装置及方法,其特征在于:所述衔接机构(8)包括u形管(801),所述u形管(801)横跨传动机构(2)的顶部且与传动机构(2)两侧的侧板(3)进行固定连接,所述u形管(801)的内腔贯穿有绳索(802),所述绳索(802)的一端与推板(704)进行固定连接,所述绳索(802)的另一端与活动片(9033)进行固定连接。
9.根据权利要求1所述的一种用于搬运机器人的分拣装置及方法,其特征在于:所述传动机构(2)包括传送履带(201),所述传送履带(201)包裹于等距横向排列的制动轴(202)和若干个辊套(203)表面,若干个所述辊套(203)的内部均活动套接有辅动轴(204),所述制动轴(202)和若干个辅动轴(204)的两端均贯穿侧板(3)的侧壁,所述制动轴(202)的一端贯穿侧板(3)侧壁后与步进电机(205)的输出轴进行固定套接。
10.根据权利要求9所述的一种用于搬运机器人的分拣装置及方法,其特征在于:所述制动轴(202)的两端贯穿侧板(3)且与之进行活动套接,若干个所述辅动轴(204)的两端贯穿侧板(3)且与之进行固定套接,所述辊套(203)活动套接于辅动轴(204)的表面,具体为一种活动卡接的方式,即所述辅动轴(204)的表面开设有凹槽,所述辊套(203)活动套接在凹槽内,避免辊套(203)在转动过程中发生偏移,且提高了传送履带(201)的传动能力。
技术总结
本发明涉及物流仓储技术领域,且公开了一种用于搬运机器人的分拣装置及方法,包括两个支撑底板,两个支撑底板的顶部均固定安装有侧板,两个侧板的内侧安装有传动机构,一个侧板的顶部安装有角度调节机构和等距排列的若干个限位机构,另一个侧板的顶部安装有角度判定机构和等距排列的若干个分类识别机构及推动机构的组合;本发明通过设有分类识别机构和推动机构,有利于通过信息采集模块对贴在货品外箱表面的条码进行采集,与该数据库中的区域序列号匹配,则编码校对模块将激活第一控制模块,进而第一控制模块操控第二电动推杆,进而第二电动推杆控制推板将货品从传动机构的顶面推出,实现了实现连续的、高效的、精准的分拣。
技术研发人员:卿茂荣,杨纪成,臧旭,侯伟仪
受保护的技术使用者:东莞市尔必地机器人有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!