一种钛及钛合金回收氧化屑料分选方法与流程
1.本发明属于钛及钛合金屑回收技术领域,具体涉及一种钛及钛合金回收氧化屑料分选方法。
背景技术:
2.目前,我国的钛工业发展前景较好,钛合金产品加工的过程中需要进行车削加工使其符合产品加工要求,而加工下来的车削屑里面依旧存在很多可以回收再利用的材料,若直接丢弃则会造成浪费。因此需要钛及钛合金屑料再利用,节约钛资源义。
3.每年国内产生钛及钛合金屑料约为2000万吨,对于钛及钛合金屑料回收再利用空间非常大,在实际回收过程中钛及钛合金屑料会产生局部氧化,以使钛及钛合金屑料的颜色改变,因此在回收过程中为了提高回收屑料质量,需要对氧化屑料及磁性材质夹杂进行剔除。
技术实现要素:
4.本发明所要解决的技术问题在于针对上述现有技术中的不足,提供一种钛及钛合金回收氧化屑料分选方法,其方法步骤简单,设计合理,以对氧化屑料及磁性材质夹杂进行剔除,且通过8个钛及钛合金屑料图像颜色异常识别,从而提高了分选后屑料的质量。
5.为解决上述技术问题,本发明采用的技术方案是:一种钛及钛合金回收氧化屑料分选方法,其特征在于,该方法包括以下步骤:步骤一、屑料的破碎及磁选:步骤101、将待回收的钛及钛合金屑料进行破碎,得到破碎后屑料;其中,破碎后屑料的粒径为2mm~15mm;步骤102、将破碎后屑料经过料斗进入振动给料机,并经过皮带机进行输送;步骤103、在破碎后屑料经过皮带机输送过程中,磁选机对屑料进行磁性材质剔除,得到待识别屑料;步骤二、屑料图像的采集及传输:步骤201、在待识别屑料从皮带机末端自由抛射下落的路径上,第一摄像机、第二摄像机、第三摄像机、第四摄像机、第五摄像机、第六摄像机、第七摄像机和第八摄像机分别对待识别屑料进行图像采集,并将采集到的各个屑料图像发送至计算机;步骤202、计算机将接收到第一摄像机、第二摄像机、第三摄像机、第四摄像机、第五摄像机、第六摄像机、第七摄像机和第八摄像机采集到的各个屑料图像分别记作第1个屑料图像,第2个屑料图像,第3个屑料图像,第4个屑料图像,第5个屑料图像,第6个屑料图像,第7个屑料图像和第8个屑料图像;所述的屑料图像为rgb图像;步骤三、第i个屑料图像的处理及颜色判断:步骤301、计算机对第i个屑料图像提取r分量、g分量和b分量,得到第i个r分量二维矩阵、第i个g分量二维矩阵和第i个b分量二维矩阵;
步骤302、计算机对第i个屑料图像进行高斯滤波,得到第i个高斯滤波后屑料图像;步骤303、计算机对第i个高斯滤波后屑料图像进行灰度化及二值化处理,得到第i个屑料二值化图像;步骤304、计算机采用连通域标记算法对第i个屑料二值化图像进行连通区域标记,得到多个屑料连通区域;步骤305、采用计算机对第i个屑料图像中第j个屑料连通区域进行颜色判断;其中,i和j均为正整数;步骤306、第j个屑料连通区域不满足颜色分选要求,则第j个屑料连通区域对应的第j个屑料为氧化屑料,喷嘴工作,以使第j个屑料偏离自由抛落路径进入废料桶;步骤四、第i+1个屑料图像的处理及颜色判断:步骤401、按照步骤三所述的方法,采用计算机对第i+1个屑料图像进行处理,直至完成第i+1个屑料图像中第j个屑料连通区域的判断;步骤402、多次重复步骤402,直至完成第8个屑料图像中第j个屑料连通区域的判断;其中,第1个屑料图像至第8个屑料图像中第j个屑料连通区域均满足颜色分选要求,则第j个屑料连通区域对应的第j个屑料为分选后回收屑料,进入集料桶收集。
6.上述的一种钛及钛合金回收氧化屑料分选方法,其特征在于:所述第一摄像机、第三摄像机和第五摄像机位于钛及钛合金屑料抛射路径上侧,所述第二摄像机、第四摄像机和第六摄像机位于钛及钛合金屑料抛射路径下侧,所述第七摄像机位于钛及钛合金屑料抛射路径后侧,所述第八摄像机位于钛及钛合金屑料抛射路径前侧。
7.上述的一种钛及钛合金回收氧化屑料分选方法,其特征在于:所述第一摄像机的光轴和第二摄像机的光轴重合且与水平线之间的夹角为20
°
~30
°
;所述第三摄像机的光轴和第四摄像机的光轴重合且与水平线之间的夹角为50
°
~60
°
;所述第五摄像机的光轴和第六摄像机的光轴重合且与水平线之间的夹角为90
°
~100
°
;所述第七摄像机的光轴和第八摄像机的光轴重合且与皮带机宽度向后方向投影之间的夹角为15
°
~20
°
。
8.上述的一种钛及钛合金回收氧化屑料分选方法,其特征在于:步骤305中采用计算机获对第i个屑料图像中第j个屑料连通区域进行颜色判断,具体过程如下:步骤3051、采用计算机获取第j个屑料连通区域中各个像素点位置,并将第j个屑料连通区域中第个像素点位置记作;其中,表示行号,表示列号;步骤3052、采用计算机从第i个r分量二维矩阵中获取第j个屑料连通区域中第个像素点位置处的r分量为,计算机从第i个g分量二维矩阵中获取第j个屑料连通区域中第个像素点位置处的g分量为,计算机从第i个b分量二维矩阵中获取第j个屑料连通区域中第个像素点位置处的b分量为;步骤3053、采用计算机将第j个屑料连通区域中第个像素点位置处、
和分别与r分量设定阈值、g分量设定阈值、b分量设定阈值进行比较,当、、时,执行步骤3054;否则执行步骤306;步骤3054、说明第j个屑料连通区域中第个像素点满足颜色分选要求,按照步骤3051至步骤3053所述的方法,对第j个屑料连通区域中第个像素点位置进行判断,直至完成第i个屑料图像中第j个屑料连通区域中所有像素点的判断。
9.本发明与现有技术相比具有以下优点:1、本发明设置第一摄像机、第二摄像机、第三摄像机、第四摄像机、第五摄像机、第六摄像机、第七摄像机和第八摄像机采集8个钛及钛合金屑料图像,实现钛及钛合金屑料多角度的表面颜色异常检测,提高了适应性。
10.2、本发明从屑料图像提取r分量、g分量和b分量,并将屑料连通区域中像素点对应的r分量、g分量和b分量分别与r分量设阈值、g分量设阈值和b分量设阈值进行比较,从而提高了异色分选的准确性。
11.3、本发明采用连通域标记算法对屑料二值化图像进行连通区域标记,得到多个屑料连通区域,每个屑料连通区域对应一个钛及钛合金屑料,这样通过对屑料连通区域的颜色判断,从而实现各个钛及钛合金屑料的颜色识别。
12.4、本发明方法步骤简单,设计合理,首先是屑料的破碎及磁选,其次是屑料图像的采集及传输,接着是第i个屑料图像的处理及颜色判断及第i+1个屑料图像的处理及颜色判断,直至第1个屑料图像至第8个屑料图像中第j个屑料连通区域均满足颜色分选要求,则第j个屑料连通区域对应的第j个屑料为分选后回收屑料,进入集料桶收集。
13.综上所述,本发明方法步骤简单,设计合理,以对氧化屑料及磁性材质夹杂进行剔除,且通过8个钛及钛合金屑料图像颜色异常识别,从而提高了分选后屑料的质量。
14.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
15.图1为本发明方法的流程框图。
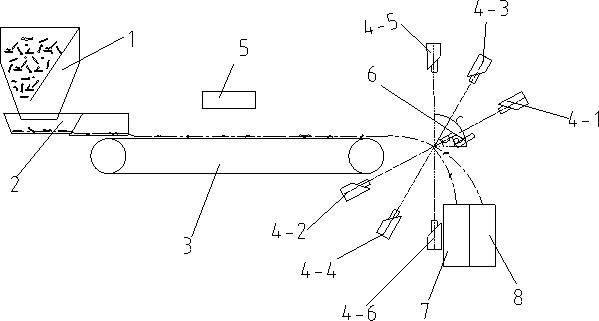
16.图2为本发明的结构示意图。
17.图3为本发明第七摄像机和第八摄像机的结构示意图。
18.附图标记说明:1-料斗;2-振动给料机;3-皮带机;4-1-第一摄像机;4-2-第二摄像机;4-3-第三摄像机;4-4-第四摄像机;4-5-第五摄像机;4-6-第六摄像机;4-7-第七摄像机;4-8-第八摄像机;5-磁选机;6-喷嘴;7-废料桶;8-集料桶。
具体实施方式
19.如图1至图3所示,本发明包括以下步骤:步骤一、屑料的破碎及磁选:
步骤101、将待回收的钛及钛合金屑料进行破碎,得到破碎后屑料;其中,破碎后屑料的粒径为2mm~15mm;步骤102、将破碎后屑料经过料斗1进入振动给料机2,并经过皮带机3进行输送;步骤103、在破碎后屑料经过皮带机3输送过程中,磁选机5对屑料进行磁性材质剔除,得到待识别屑料;步骤二、屑料图像的采集及传输:步骤201、在待识别屑料从皮带机3末端自由抛射下落的路径上,第一摄像机4-1、第二摄像机4-2、第三摄像机4-3、第四摄像机4-4、第五摄像机4-5、第六摄像机4-6、第七摄像机4-7和第八摄像机4-8分别对待识别屑料进行图像采集,并将采集到的各个屑料图像发送至计算机;步骤202、计算机将接收到第一摄像机4-1、第二摄像机4-2、第三摄像机4-3、第四摄像机4-4、第五摄像机4-5、第六摄像机4-6、第七摄像机4-7和第八摄像机4-8采集到的各个屑料图像分别记作第1个屑料图像,第2个屑料图像,第3个屑料图像,第4个屑料图像,第5个屑料图像,第6个屑料图像,第7个屑料图像和第8个屑料图像;所述的屑料图像为rgb图像;步骤三、第i个屑料图像的处理及颜色判断:步骤301、计算机对第i个屑料图像提取r分量、g分量和b分量,得到第i个r分量二维矩阵、第i个g分量二维矩阵和第i个b分量二维矩阵;步骤302、计算机对第i个屑料图像进行高斯滤波,得到第i个高斯滤波后屑料图像;步骤303、计算机对第i个高斯滤波后屑料图像进行灰度化及二值化处理,得到第i个屑料二值化图像;步骤304、计算机采用连通域标记算法对第i个屑料二值化图像进行连通区域标记,得到多个屑料连通区域;步骤305、采用计算机对第i个屑料图像中第j个屑料连通区域进行颜色判断;其中,i和j均为正整数;步骤306、第j个屑料连通区域不满足颜色分选要求,则第j个屑料连通区域对应的第j个屑料为氧化屑料,喷嘴6工作,以使第j个屑料偏离自由抛落路径进入废料桶7;步骤四、第i+1个屑料图像的处理及颜色判断:步骤401、按照步骤三所述的方法,采用计算机对第i+1个屑料图像进行处理,直至完成第i+1个屑料图像中第j个屑料连通区域的判断;步骤402、多次重复步骤402,直至完成第8个屑料图像中第j个屑料连通区域的判断;其中,第1个屑料图像至第8个屑料图像中第j个屑料连通区域均满足颜色分选要求,则第j个屑料连通区域对应的第j个屑料为分选后回收屑料,进入集料桶8收集。
20.本实施例中,所述第一摄像机4-1、第三摄像机4-3和第五摄像机4-5位于钛及钛合金屑料抛射路径上侧,所述第二摄像机4-2、第四摄像机4-4和第六摄像机4-6位于钛及钛合金屑料抛射路径下侧,所述第七摄像机4-7位于钛及钛合金屑料抛射路径后侧,所述第八摄像机4-8位于钛及钛合金屑料抛射路径前侧。
21.本实施例中,所述第一摄像机4-1的光轴和第二摄像机4-2的光轴重合且与水平线
之间的夹角为20
°
~30
°
;所述第三摄像机4-3的光轴和第四摄像机4-4的光轴重合且与水平线之间的夹角为50
°
~60
°
;所述第五摄像机4-5的光轴和第六摄像机4-6的光轴重合且与水平线之间的夹角为90
°
~100
°
;所述第七摄像机4-7的光轴和第八摄像机4-8的光轴重合且与皮带机3宽度向后方向投影之间的夹角为15
°
~20
°
。
22.本实施例中,步骤305中采用计算机获对第i个屑料图像中第j个屑料连通区域进行颜色判断,具体过程如下:步骤3051、采用计算机获取第j个屑料连通区域中各个像素点位置,并将第j个屑料连通区域中第个像素点位置记作;其中,表示行号,表示列号;步骤3052、采用计算机从第i个r分量二维矩阵中获取第j个屑料连通区域中第个像素点位置处的r分量为,计算机从第i个g分量二维矩阵中获取第j个屑料连通区域中第个像素点位置处的g分量为,计算机从第i个b分量二维矩阵中获取第j个屑料连通区域中第个像素点位置处的b分量为;步骤3053、采用计算机将第j个屑料连通区域中第个像素点位置处、和分别与r分量设定阈值、g分量设定阈值、b分量设定阈值进行比较,当、、时,执行步骤3054;否则执行步骤306;步骤3054、说明第j个屑料连通区域中第个像素点满足颜色分选要求,按照步骤3051至步骤3053所述的方法,对第j个屑料连通区域中第个像素点位置进行判断,直至完成第i个屑料图像中第j个屑料连通区域中所有像素点的判断。
23.本实施例中,需要说明的是,破碎后屑料的粒径为破碎后屑料的最大长度。
24.本实施例中,实际使用时,磁选机5可参考永磁磁选机,或者其他能实现同样功能的磁选机。
25.本实施例中,实际使用时,每个屑料图像中每个屑料连通区域的判断方法相同,按照步骤305所述的方法完成每个屑料连通区域的判断。
26.本实施例中,实际使用时,r分量设定阈值、g分量设定阈值、b分量设定阈值可以根据实际需要设定。
27.本实施例中,实际使用时,进一步优选,选择满足回收要求的钛及钛合金屑料预先经过步骤一至步骤305处理,从而获取各个屑料连通区域内各个像素对应的r分量、各个屑料连通区域内各个像素对应的g分量和各个屑料连通区域内各个像素对应的b分量,并将各个屑料连通区域内各个像素对应的r分量的平均值作为,各个屑料连通区域内各个像素对应的g分量的平均值作为,各个屑料连通区域内各个像素对应的b分量的平均值作为
。
28.本实施例中,实际使用时,喷嘴6进行剔除可采用本领域色选机或者其它能实现同样功能的常规技术手段。
29.综上所述,本发明方法步骤简单,设计合理,以对氧化屑料及磁性材质夹杂进行剔除,且通过8个钛及钛合金屑料图像颜色异常识别,从而提高了分选后屑料的质量。
30.以上所述,仅是本发明的较佳实施例,并非对本发明作任何限制,凡是根据本发明技术实质对以上实施例所作的任何简单修改、变更以及等效结构变化,均仍属于本发明技术方案的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1