一种分拣机器人及其分拣方法与流程
本技术涉及自动分拣,尤其是涉及一种分拣机器人及其分拣方法。
背景技术:
1、传统分拣基本通过人眼识别以及人工记忆对物品分拣,但是存在有分拣过程慢、人工劳动强度大、分拣效率较为低下的问题,
2、为此行业内出现了分拣机器人,分拣机器人一般包括移动底盘和分拣结构,分拣结构设置在移动底盘上,通过分拣机构对货物进行夹取转移,分拣机器人获取货品后,通过系统调度算法运动到指定位置处放置货品,以完成分拣任务,但是相关技术中的分拣机器人在分拣货品时,分拣机器人单次只能携带单个货品,分拣效率低,分拣机器人抓取通过扫描货品上的标签再抓取货物,但是若货品的标签贴错则会导致货品的分拣发生失误。
3、因此上述的分拣机器人在分拣货物的过程中,存在有分拣效率低以及分拣出错的问题。
技术实现思路
1、为了提升分拣效率,改善货品分拣出错的问题,本技术提供一种分拣机器人及其分拣方法。
2、第一方面,本技术提供的一种分拣机器人采用如下的技术方案:
3、一种分拣机器人,包括:
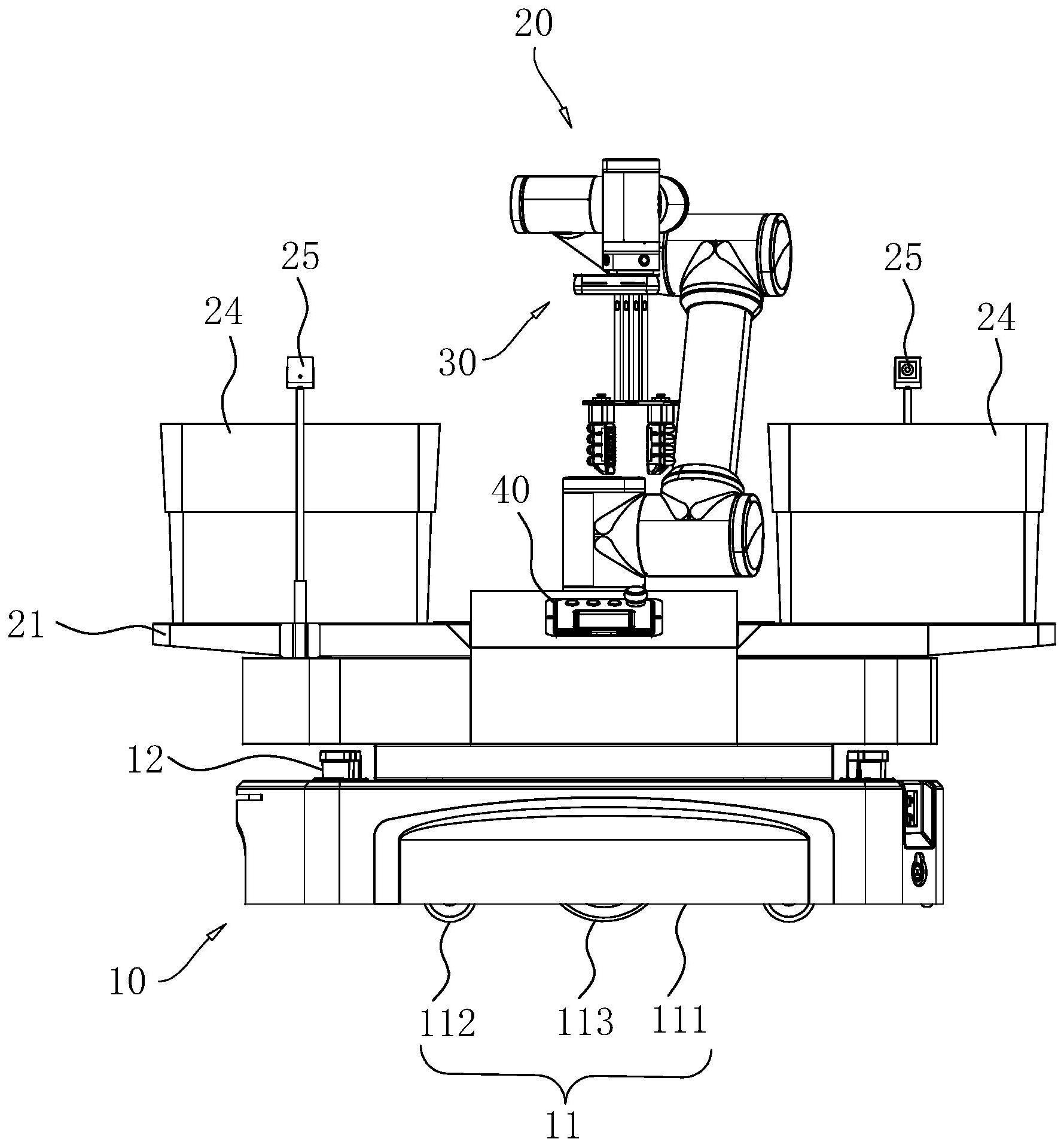
4、移动机构,包括移动组件和探测件,所述探测件设置在所述移动组件上,所述探测件用于定位分拣机器人的位置;
5、分拣机构,设置在所述移动机构上,所述分拣机构包括安装架、机械臂组件和抓取组件,所述安装架与所述移动组件相连接,所述机械臂组件设置在所述安装架上,所述抓取组件与所述机械臂组件相连接,所述安装架上还设置有多个货品收纳箱以用于收纳不同货品;
6、检测机构,设置在所述分拣机构上,用于检测货品的标签以及货品的特征信息。
7、基于上述技术方案,移动组件上的探测件探测分拣机器人和货品放置架的位置,从而为分拣机器人规划行进路径,避免与货品放置架相撞;通过移动机构转移分拣机构和检测机构,通过检测机构对货品进行双重检测,分别对货品的标签以及货品的特征信息进行检测,从而确定货品的种类以及货品需要放置的货品收纳箱,从而通过机械臂组件将抓取组件上的货品转移至相对应的货品收纳箱内,若货品贴错标签时,也可通过检测机构确定货品的特征信息,将货品放置在正确的货品收纳箱内,从而提升货品的分拣效率,改善货品分拣出错的情况。
8、优选的,所述检测机构包括连接板和摄像头,所述连接板与所述机械臂组件相连接,所述摄像头与所述连接板相连接,所述摄像头包括条码扫描部和图像特征获取部,所述条码扫描部用于扫描货品的标签,所述图像特征获取部用于获取货品的图像特征信息。
9、基于上述技术方案,摄像头通过连接板与机械臂组件相连接,以便于摄像头的安装,同时方便摄像头对抓取组件上的产品进行扫描检测,摄像头上的条码扫描部扫描货品的标签,图像特征获取部获取货品的图像特征信息,通过双重检验以确认货品,使得货品能放置在正确的货品收纳箱内。
10、优选的,所述货品收纳箱上设置有位置摄像头,所述位置摄像头用于检测所述货品收纳箱内的货品的位置。
11、基于上述技术方案,通过位置摄像头检测货品收纳箱内货品的位置,在货品收纳箱装满货品后停滞放置,避免货品满溢。
12、优选的,所述机械臂组件包括第一机械臂和第二机械臂,所述第一机械臂的一端通过第一机械关节设置在所述安装架上,所述第一机械臂的另一端通过第二机械关节与所述第二机械臂的一端相连接,所述第二机械臂的另一端设置有第三机械关节,所述抓取组件与所述第三机械关节相连接。
13、基于上述技术方案,通过第一机械关节、第一机械臂、第二机械关节、第二机械臂和第三机械关节之间的连接,使得与第三机械关节相连接的抓取组件和检测机构转至不同角度,以便于对货品在不同的角度对货品进行检测,同时驱动抓取组件转移货品。
14、优选的,所述抓取组件包括安装板和两组气囊抓取件,所述安装板与所述第三机械关节相连接,所述安装板上开设有滑槽,所述气囊抓取件滑移设置在所述滑槽内,以使两组气囊抓取件相对运动夹取货品。
15、基于上述技术方案,安装板上开开设有滑槽以便于安装气囊抓取件,气囊抓取件滑移设置以便于改变两组气囊抓取件之间的范围,从而实现对货品的抓取。
16、优选的,所述气囊抓取件包括通气部,所述通气部上开设有多个通气通道和通气口,所述通气口上设置有充气装置,所述充气装置通过所述通气口和所述通气通道为所述气囊抓取件充气。
17、基于上述技术方案,气体依次通过通气口和通气通道对气囊抓取件充气,充气完成后以方便抓取货品。
18、优选的,所述通气部的一侧为抓取部,所述抓取部上开设有多个防滑槽,多个所述防滑槽相平行设置。
19、基于上述技术方案,气囊抓取件的抓取部与货品相接触,抓取部上开设有多个防滑槽,通过防滑槽的设置增大气囊抓取件与货品之间的摩擦,从而方便稳固抓取货品。
20、优选的,所述移动组件包括移动平台和万向轮,所述万向轮与所述移动平台转动连接,所述移动平台用于承载所述分拣机构,所述移动平台上还设置有从动轮,所述从动轮设置在相邻所述万向轮之间。
21、基于上述技术方案,通过万向轮实现分拣机器人的移动,从动轮分担万向轮承担的移动机构上的各个机构的重量。
22、第二方面,本技术提供一种分拣方法,采用如下的技术方案:
23、一种分拣方法,采用分拣机器人,该分拣方法包括以下步骤:
24、规划路径,通过探测件探测分拣机器人的位置并根据货品位置为分拣机器人规划行走路径;
25、确定货品信息,检测机构对货品的标签以及货品的特征信息进行扫描并与分拣机器人内存的货品信息进行对比;
26、分拣货品,机械臂组件将不同货品转移至不同的货品收纳箱内。
27、基于上述技术方案,探测件探测分拣机器人和货品位置,从而为分拣机器人规划路径,检测机构对货品的标签和货品的特征信息,通过与分拣机器人内存的相关信息进行对比,从而确定货品所需放置的货品收纳箱,机械臂组件通过规划好的路径将货品转移至货品收纳箱内。
28、优选的,通过条码扫描部扫描货品的标签,通过图像特征获取部获取货品的图像特征信息,双重对比后,机械臂组件驱动气囊抓取件抓取货品转移至对应的货品收纳箱内。
29、基于上述技术方案,条码扫描部扫描货品的标签,图像特征获取部扫描货品的图像特征信息,通过标签和图像特征信息的双重对比,从而提升分拣的准确性,再通过机械臂组件和气囊抓取件将货品放置在相对应的货品收纳箱内。
30、综上所述,本技术包括以下至少一种有益技术效果:
31、1.探测件为分拣机器人规划行进路径,通检测机构对货品进行双重检测,抓取组件将货品放置在对应的货品收纳箱内,若货品贴错标签时,也可通过检测机构确定货品的特征信息,将货品放置在正确的货品收纳箱内,从而提升货品的分拣效率,改善货品分拣出错的情况;
32、2.条码扫描部扫描货品的标签,图像特征获取部获取货品的图像特征信息,通过双重检验以确认货品,使得货品能放置在正确的货品收纳箱内;
33、3.通过位置摄像头检测货品收纳箱内货品的位置,避免货品满溢。
- 还没有人留言评论。精彩留言会获得点赞!