一种搬运机器人的控制方法、装置以及快捷分拣搬运系统与流程
本发明涉及物联网,特别是涉及一种搬运机器人的控制方法、装置以及快捷分拣搬运系统。
背景技术:
1、在物流系统中,包裹的识别与分拣是一个重要环节。通过识别分拣,可以将包裹进行归类,便于包裹后续的分派以及运输。现有技术提供的包裹识别分拣系统基本采用自动输送线结合条形码识别的方式,利用安装于输送线上方的条形码识别设备识别出包裹的条形码,通过系统的匹配计算确定该包裹目的地,从而控制输送线将包裹输送到对应的下料口,在每个下料口处由专门的处理人员将送达的包裹码放上架以等待下一个环节的运输。
2、这种方式的一个主要问题是,包裹在仓库内的主要输送过程依靠自动输送线,这就要求自动输送线能够尽可能地延伸到每个货架,否则处理人员的搬运工作将十分繁重,但是输送线延伸得越长,后期的维护调整越不便,要增加或者减少下料口或者调整货架的数量或者位置时,整个输送线都要改动,维护成本很高。
3、现有技术提供了采用搬运机器人在仓库内进行货物搬运的方案,仓库内环境条件稳定,很适合搬运机器人工作;且仓库内的搬运属于短距离运输,搬运机器人体积小巧,运动灵活,具有明显的优势。在此场景下,如何提高搬运机器人的工作效率是需要解决的问题。
技术实现思路
1、基于此,有必要针对上述的问题,提供一种搬运机器人的控制方法、装置以及快捷分拣搬运系统。
2、本发明实施例是这样实现的,一种搬运机器人的控制方法,所述搬运机器人的控制方法包括:
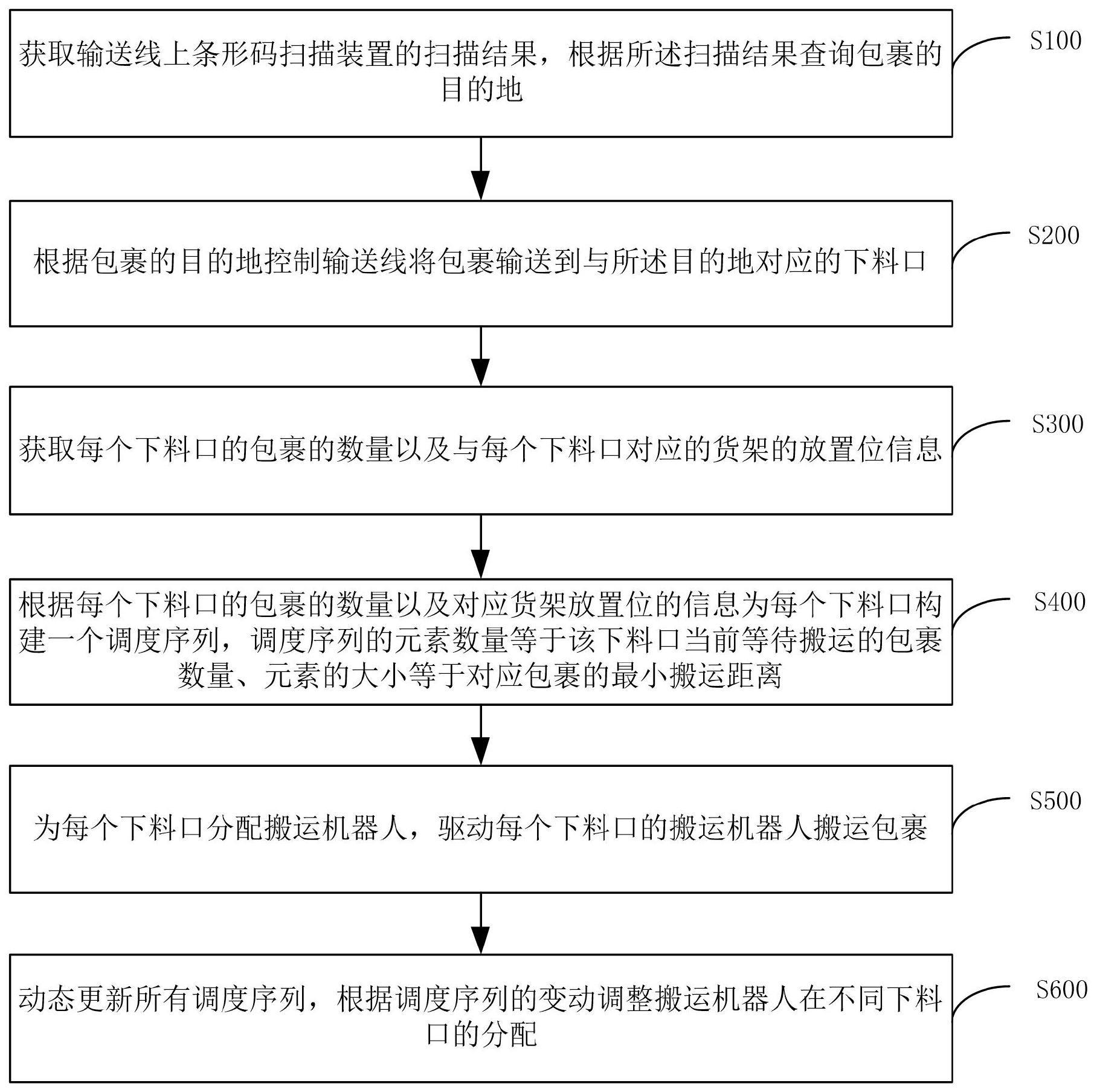
3、获取输送线上条形码扫描装置的扫描结果,根据所述扫描结果查询包裹的目的地;
4、根据包裹的目的地控制输送线将包裹输送到与所述目的地对应的下料口;
5、获取每个下料口的包裹的数量以及与每个下料口对应的货架的放置位信息;
6、根据每个下料口的包裹的数量以及对应货架放置位的信息为每个下料口构建一个调度序列,调度序列的元素数量等于该下料口当前等待搬运的包裹数量、元素的大小等于对应包裹的最小搬运距离;
7、为每个下料口分配搬运机器人,驱动每个下料口的搬运机器人搬运包裹;
8、动态更新所有调度序列,根据调度序列的变动调整搬运机器人在不同下料口的分配。
9、在其中一个实施例中,本发明提供了一种搬运机器人的控制装置,所述搬运机器人的控制装置包括:
10、扫描结果获取模块,用于获取输送线上条形码扫描装置的扫描结果,根据所述扫描结果查询包裹的目的地;
11、输送控制模块,用于根据包裹的目的地控制输送线将包裹输送到与所述目的地对应的下料口;
12、下料口监测模块,用于获取每个下料口的包裹的数量以及与每个下料口对应的货架的放置位信息;
13、监测模块,用于根据每个下料口的包裹的数量以及对应货架放置位的信息为每个下料口构建一个调度序列,调度序列的元素数量等于该下料口当前等待搬运的包裹数量、元素的大小等于对应包裹的最小搬运距离;
14、分配模块,用于为每个下料口分配搬运机器人,驱动每个下料口的搬运机器人搬运包裹;
15、调度模块,用于动态更新所有调度序列,根据调度序列的变动调整搬运机器人在不同下料口的分配。
16、在其中一个实施例中,本发明提供了一种快捷分拣搬运系统,所述快捷分拣搬运系统包括输送线、若干搬运机器人、若干货架以及控制模块;
17、所述输送线用于包裹的输送,输送线上设置有条码扫描装置,所述条码扫描装置用于识别包裹上的条形码,并将识别结果传输给控制模块、接收控制模块返回的控制信息以将对应包裹输送到相应的下料口;
18、所述搬运机器人用于根据所述控制模块的指令,从指定的下料口搬运包裹并输送到指定货架的放置位;
19、所述货架用于包裹的暂时存放;
20、所述控制模块分别与所述输送线、所述条码扫描装置以及所述搬运机器人通信,用于执行如本发明所述的搬运机器人的控制方法。
21、本发明提供的方法通过扫描条形码并查询到得包裹的目的地,根据包裹的目的地将包裹从输送线的不同下料口输出,通过每个下料配备搬运机器人,可以实现包裹从输送线到货架的自动搬运;在本发明中,通过为每个下料口构建调度序列,根据调度序列调节搬运机器人在各个下料口的数量分配,从而解决某些下料口包裹积压而某些下料口搬运机器人无物可搬的问题。本发明的方法提高了搬运机器人的利用率,减少了搬运机器的空置率,通过合理地调配搬运机器人不同下料口的分配,解决下料口包裹堆积的问题。
技术特征:
1.一种搬运机器人的控制方法,其特征在于,所述搬运机器人的控制方法包括:
2.根据权利要求1所述的搬运机器人的控制方法,其特征在于,所述为每个下料口分配搬运机器人,包括:
3.根据权利要求2所述的搬运机器人的控制方法统,其特征在于,所述根据所得的比值为相应下料口增加搬运机器人,包括:
4.根据权利要求1所述的搬运机器人的控制方法,其特征在于,所述根据调度序列的变动调整搬运机器人在不同下料口的分配,包括:
5.根据权利要求4所述的搬运机器人的控制方法,其特征在于,所述执行调度模式,包括:
6.根据权利要求5所述的搬运机器人的控制方法,其特征在于,所述在匹配成对的两个下料口之间调配搬运机器人,包括:
7.根据权利要求4所述的搬运机器人的控制方法,其特征在于,所述执行分配模式,包括:
8.根据权利要求1所述的搬运机器人的控制方法,其特征在于,所述根据调度序列的变动调整搬运机器人在不同下料口的分配,还包括:
9.一种搬运机器人的控制装置,其特征在于,所述搬运机器人的控制装置包括:
10.一种快捷分拣搬运系统,其特征在于,所述快捷分拣搬运系统包括输送线、若干搬运机器人、若干货架以及控制模块;
技术总结
本发明涉及物联网技术领域,特别是涉及一种搬运机器人的控制方法、装置以及快捷分拣搬运系统,所述方法包括:获取输送线上条形码扫描装置的扫描结果,根据所述扫描结果查询包裹的目的地;根据包裹的目的地控制输送线将包裹输送到与所述目的地对应的下料口;获取每个下料口的包裹的数量以及与每个下料口对应的货架的放置位信息;为每个下料口构建一个调度序列;为每个下料口分配搬运机器人,驱动每个下料口的搬运机器人搬运包裹;动态更新所有调度序列,根据调度序列的变动调整搬运机器人在不同下料口的分配。本发明对包裹目的地进行分类,之后通过为每个下料口构建调度序列,通过实时更新调度序列的方式实现搬运机器人在各个下料口的调配。
技术研发人员:贾力,朱红娇
受保护的技术使用者:稳石机器人(深圳)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!