一种基于视觉识别技术的燕窝自动精挑装置的制作方法
本技术涉及食品加工的,具体是涉及一种基于视觉识别技术的燕窝自动精挑装置。
背景技术:
1、燕窝是由雨燕科金丝燕及同属类的唾液或者绒羽等混唾液凝结而成的巢窝。燕窝按其来源可分为屋燕和洞燕,屋燕产自人类搭建的引燕窝,洞燕产自岛屿或海边的洞穴内。燕窝的产地主要包括我国南海诸岛及东南亚国家,如马来西亚、印度尼西亚、泰国和越南等。早在明朝时期,燕窝已成为属国进贡朝廷的贡品。
2、燕窝中所含氨基酸种类丰富,蛋白质和唾液酸含量高,具有益气化痰、滋肾养肺等功效。现代医学研究表明,燕窝还具有抗病毒、增强免疫力、促进细胞分裂等功效,常用于孕妇及中老年虚弱患者人群。
3、目前市面上在售产品包括干燕窝和即食燕窝。即食燕窝是指以罐头工艺加工生产,将符合要求的燕窝原料经处理、调配、灌装、密封、蒸煮、杀菌、冷却、检验、包装出厂,达到商业无菌要求,在常温下能够长期保存的燕窝食品,携带方便、开瓶即食。随着燕窝的营养价值逐渐被认知,市场上燕窝产品品类也越来越多,从传统单一的纯滋补类到包装规格包装样式的多变,再到产品形式的升级,在燕窝新品的一步步演变中,燕窝行业逐渐发展壮大。
4、燕窝杂质挑拣是即食燕窝产品生产过程中必不可少的一道工序。燕窝原料的干净度,直接影响生产过程燕窝的挑拣效率以及即食燕窝的成品品质。燕窝原料的杂质来源主要有:第一,燕窝原料本身带入,如燕毛、黑点、白块、蛋膜、蛋壳等;第二,外来污染导致的,如细线、塑料丝、木屑、纸屑、沙子。
5、目前燕窝杂质主要采用人工挑拣的方式,人工挑拣的过程如图1所示:白盘挑拣→镊子除杂→黑盘挑拣→镊子除杂→质检,这种方式存在以下问题:
6、1)检测杂质工作需要使用大量劳动力,导致生产成本居高不下;长时间的目视挑拣,急剧增加人员的疲劳度,存在缺陷漏检风险,影响产品质量稳定性;
7、2)人工挑拣受主观原因影响,存在判断标准不统一,导致产品干净度质量参差不齐;人工挑拣杂质极大地限制即食燕窝产能进一步提升,因此,如何提高挑拣效率成为众多生产企业亟待解决的问题。
技术实现思路
1、为解决上述问题,本实用新型提供了一种基于视觉识别技术的燕窝自动精挑装置,替代人工进行原料的杂质挑拣,解决人工挑拣效率低下等问题。
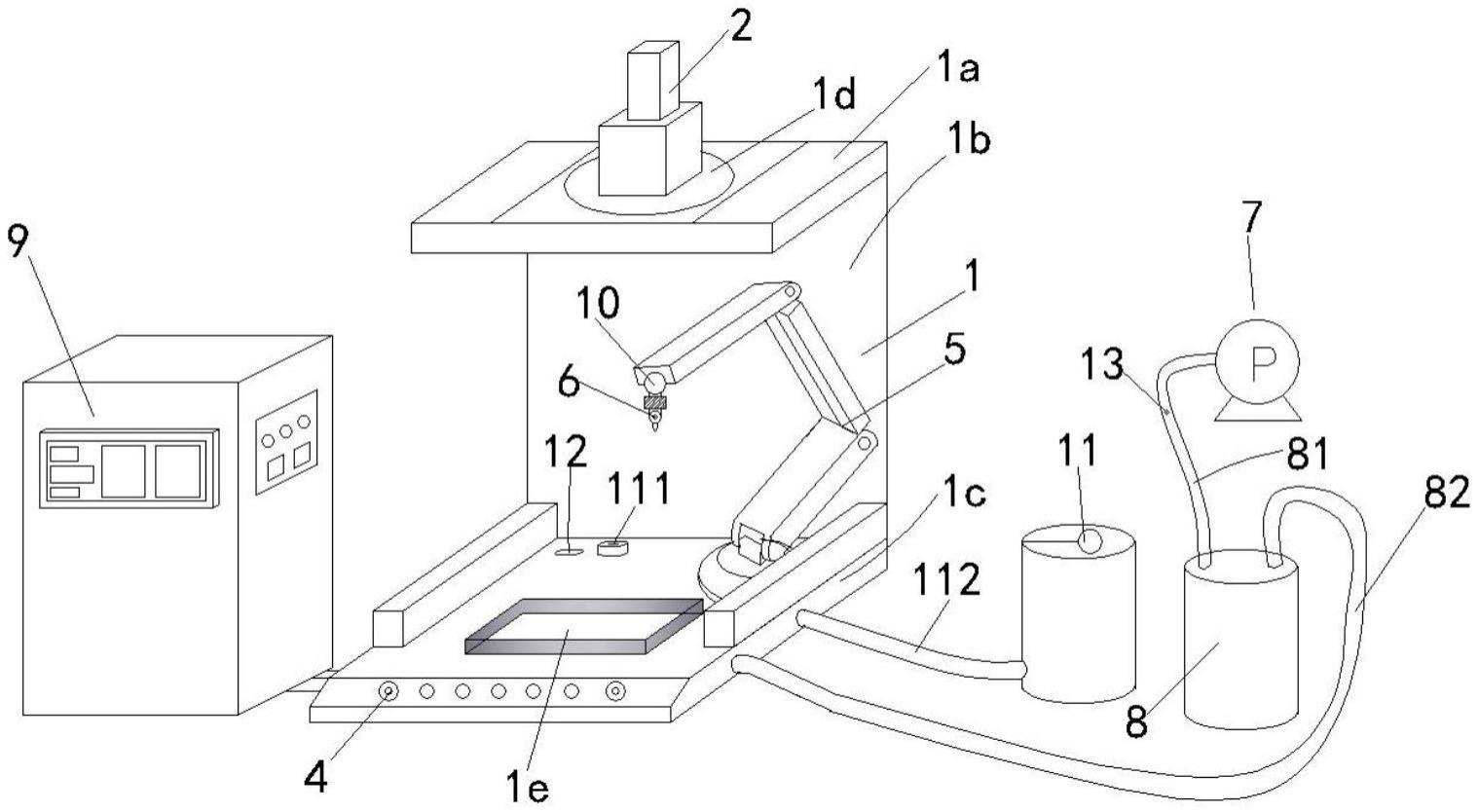
2、本实用新型是这样实现的:一种基于视觉识别技术的燕窝自动精挑装置,包括:
3、支撑架,所述支撑架包括上固定板、中固定板及下固定板,所述中固定板的两端分别与上固定板及下固定板连接;所述上固定板上设有通光孔,所述下固定板的下方设有待检口;
4、照明光源,所述照明光源安装于通光孔上,且所述照明光源的中部设有镂空区域;
5、图像采集器,所述图像采集器安装于镂空区域的正上方;
6、挑检模具,所述挑检模具放置于待检口上,且所述挑检模具安装于镂空区域的正下方;
7、操作模块,所述操作模块安装于下固定板的前端;
8、机械臂,所述机械臂的下端部安装于下固定板上;
9、挑拣刀头,所述挑拣刀头设置于机械臂的上端部;工作时,通过控制所述机械臂带动挑拣刀头至挑检模具对杂质进行挑检;
10、真空泵;
11、废品箱,所述废品箱的一端通过第一管道连接于真空泵,另一端通过第二管道连接至挑拣刀头;通过所述真空泵将由挑拣刀头切断后的杂质从第二管道回收至废品箱;
12、及电气控制箱,所述电气控制箱分别与图像采集器、照明光源、操作模块、机械臂和真空泵连接。
13、进一步的,还包括:压力传感器,所述压力传感器设置于挑拣刀头上,且压力传感器与电气控制箱连接。
14、进一步的,还包括:供水箱,所述下固定板上设置有吸水口,所述供水箱通过进水管道连通至吸水口;清理所述第二管道时,将所述第二管道移动至吸水口,通过真空泵将水由所述第二管道引入废品箱。
15、进一步的,所述供水箱包括箱体和与所述箱体匹配的盖子,所述盖子上设有密封孔,所述箱体的内侧壁上设置有阀芯,所述阀芯通过阀杆连接有与所述密封孔相匹配的浮球,当水位达到设定位置时,所述浮球带动阀杆上的阀芯密封住盖子的密封孔。
16、进一步的,还包括刀头清理针和气压传感器,所述清理针设置于所述下固定板上,所述气压传感器安装于第一管道内,且与电气控制器连接。
17、进一步的,所述电气控制箱包括输入电源、plc控制器及io控制模块、空气开关盒和复位指示灯,所述plc控制器分别与输入电源、io控制模块、空气开关盒、复位指示灯、图像采集器、照明光源、操作模块、机械臂、真空泵、压力传感器及气压传感器连接。
18、进一步的,所述下固定板的两端设置有围挡,所述待检口的四周设置有复数个排水孔。
19、进一步的,所述挑检模具为干挑模具或湿挑模具,所述干挑模具包括安置板、连接柱及支撑座,所述安置板通过连接柱与支撑座连接,所述安置板为聚丙烯板,所述支撑座为球状的实心橡胶座,所述支撑座用于放置待检的干燕窝燕盏;所述湿挑模具包括安放板,所述安放板为聚丙烯板,用于放置待检的湿燕窝物料。
20、进一步的,所述挑拣刀头为干挑刀头或湿挑刀头,所述干挑刀头采用旋转刀头,其直径为0.5-2.5mm,具有螺旋凹槽;所述湿挑刀头为圆柱形刀头,其直径为1-3mm,所述湿挑刀头的外壁套有弹簧,所述湿挑刀头的底部具有圆环。
21、进一步的,所述图像采集器为工业相机,所述操作模块为按键开关。
22、本实用新型的有益效果是:
23、1、通过此装置可提升燕窝原料的处理效率,部分或完全替代人工,节约人力成本;
24、2、通过此装置可选择干挑模式或湿挑模式,满足干燕窝生产线和即食燕窝生产线不同的挑拣要求;
25、3、通过机械臂的压力传感器监控,有效控制机械臂的运动轨迹,最大程度地保护燕窝原料条状不受破坏,可以有效提高成品的品质;
26、4、通过视觉系统与机械手协同动作,可以引导精确除去物料中的杂质。
技术特征:
1.一种基于视觉识别技术的燕窝自动精挑装置,其特征在于,包括:
2.根据权利要求1所述的一种基于视觉识别技术的燕窝自动精挑装置,其特征在于,还包括:压力传感器,所述压力传感器设置于挑拣刀头上,且压力传感器与电气控制箱连接。
3.根据权利要求1所述的一种基于视觉识别技术的燕窝自动精挑装置,其特征在于,还包括:供水箱,所述下固定板上设置有吸水口,所述供水箱通过进水管道连通至吸水口;清理所述第二管道时,将所述第二管道移动至吸水口,通过真空泵将水由所述第二管道引入废品箱。
4.根据权利要求3所述的一种基于视觉识别技术的燕窝自动精挑装置,其特征在于,所述供水箱包括箱体和与所述箱体匹配的盖子,所述盖子上设有密封孔,所述箱体的内侧壁上设置有阀芯,所述阀芯通过阀杆连接有与所述密封孔相匹配的浮球,当水位达到设定位置时,所述浮球带动阀杆上的阀芯密封住盖子的密封孔。
5.根据权利要求2所述的一种基于视觉识别技术的燕窝自动精挑装置,其特征在于,还包括刀头清理针和气压传感器,所述清理针设置于所述下固定板上,所述气压传感器安装于第一管道内,且与电气控制器连接。
6.根据权利要求5所述的一种基于视觉识别技术的燕窝自动精挑装置,其特征在于,所述电气控制箱包括输入电源、plc控制器及io控制模块、空气开关盒和复位指示灯,所述plc控制器分别与输入电源、io控制模块、空气开关盒、复位指示灯、图像采集器、照明光源、操作模块、机械臂、真空泵、压力传感器及气压传感器连接。
7.根据权利要求1所述的一种基于视觉识别技术的燕窝自动精挑装置,其特征在于,所述下固定板的两端设置有围挡;所述待检口的四周设置有复数个排水孔。
8.根据权利要求1所述的一种基于视觉识别技术的燕窝自动精挑装置,其特征在于,所述挑检模具为干挑模具或湿挑模具,所述干挑模具包括安置板、连接柱及支撑座,所述安置板通过连接柱与支撑座连接,所述安置板为聚丙烯板,所述支撑座为球状的实心橡胶座,所述支撑座用于放置待检的干燕窝燕盏;所述湿挑模具包括安放板,所述安放板为聚丙烯板,用于放置待检的湿燕窝物料。
9.根据权利要求1所述的一种基于视觉识别技术的燕窝自动精挑装置,其特征在于,所述挑拣刀头为干挑刀头或湿挑刀头,所述干挑刀头采用旋转刀头,其直径为0.5-2.5mm,具有螺旋凹槽;所述湿挑刀头为圆柱形刀头,其直径为1-3mm,所述湿挑刀头的外壁套有弹簧,所述湿挑刀头的底部具有圆环。
10.根据权利要求1所述的一种基于视觉识别技术的燕窝自动精挑装置,其特征在于,所述图像采集器为工业相机,所述操作模块为按键开关。
技术总结
本技术提供了一种基于视觉识别技术的燕窝自动精挑装置,包括支撑架,包括上固定板、中固定板及下固定板,上固定板上设有通光孔,下固定板的下方设有待检口;照明光源,安装于通光孔上,且设有镂空区域,图像采集器,安装于镂空区域正上方;挑检模具,放置于待检口上,且安装于镂空区域正下方;操作模块,安装于下固定板的前端;机械臂,安装于下固定板上;挑拣刀头,设置于机械臂的上端部;真空泵;废品箱,一端通过连接于真空泵,另一端连接至挑拣刀头;及电气控制箱,分别与图像采集器、操作模块、机械臂和真空泵连接。本技术替代人工进行原料的杂质挑拣,解决人工挑拣效率低下等问题。
技术研发人员:范群艳,林海彭,邹锋扬,张梦珊,郭平强,钟小花,黄健
受保护的技术使用者:厦门市燕之屋丝浓食品有限公司
技术研发日:20220620
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!