一种实验室用多方位机器人分拣设备的制作方法
本技术涉及机器人分拣设备领域,特别是涉及一种实验室用多方位机器人分拣设备。
背景技术:
1、一种实验室用多方位机器人分拣设备是一种具备控制器、传感器、电子光学、机械臂和抓头装置的一种设备,该设备可以通过对不同物料进行识别和抓夹,从而达到分拣的目的。
2、现有的实验室用多方位机器人分拣设备大多采用一种抓头,在需要分拣物料种类差别较大的时候就需要一次次更换抓头,并且更换抓头的步骤繁琐,从而导致机器人分拣不同物料的使用效率大大下降。
技术实现思路
1、为了克服现有技术的不足,本实用新型提供一种实验室用多方位机器人分拣设备,能解决在需要分拣物料种类差别较大的时候就需要一次次更换抓头,更换抓头步骤繁琐,从而导致机器人分拣效率大大下降的技术问题。
2、为解决上述技术问题,本实用新型提供如下技术方案:一种实验室用多方位机器人分拣设备,包括机械臂和位于机械臂下方的机器车体,所述机械臂一端下方连接有第一转轴,所述第一转轴下表面固定连接有梯形连接块,所述梯形连接块一个侧面连接有第一液压杆装置,所述第一液压杆装置下方连接有压板式抓头,所述梯形连接块另一侧面连接有第二液压杆装置,所述第二液压杆装置下方连接有钩式抓头,所述梯形连接块下表面固定连接有磁性装置。
3、作为本实用新型的一种优选技术方案,所述磁性装置下端固定连接有长方体铁块,所述长方体铁块中间内部设有孔槽,且所述孔槽内固定连接有线圈。
4、作为本实用新型的一种优选技术方案,所述第一液压杆装置下表面固定连接有第一撑板,所述第一撑板两端转动连接有弯臂,所述弯臂的另一端表面固定连接有夹板,所述夹板的夹面一侧设置有防滑层。
5、作为本实用新型的一种优选技术方案,所述第一液压杆装置连接有伸缩杆,所述伸缩杆贯穿第一撑板,所述伸缩杆末端固定连接有第二撑板,所述第二撑板两端转动连接有支撑柱,所述支撑柱的另一端连接有弯臂。
6、作为本实用新型的一种优选技术方案,所述机器车体下端设置有四个支撑腿,所述支撑腿下方固定连接有万向轮,所述机器车体上表面一侧设置有控制面板,所述机器车体上表面另一侧转动连接有第二转轴。
7、作为本实用新型的一种优选技术方案,所述第二转轴上表面固定连接有机械臂,所述机械臂上设置有三个驱动轴,所述机械臂靠近第一转轴附近设置有方向轴。
8、与现有技术相比,本实用新型能达到的有益效果是:通过第二转轴可以控制机械臂的转动方位,通过方向轴可以控制抓头的角度,通过第一转轴可以控制抓头的旋转方向,同时压板式抓头可以进行分拣像玻璃和橡胶类的实验物料,钩式抓头可以更好的分拣铜片之类的较硬的物料,中间的磁性装置可轻松的分拣磁铁性物料,不再需要频繁的更换抓头,从而能够有效的提高工作效率。
技术特征:
1.一种实验室用多方位机器人分拣设备,包括机械臂(1)和位于机械臂(1)下方的机器车体(2),其特征在于:所述机械臂(1)一端下方连接有第一转轴(3),所述第一转轴(3)下表面固定连接有梯形连接块(4),所述梯形连接块(4)一个侧面连接有第一液压杆装置(5),所述第一液压杆装置(5)下方连接有压板式抓头(6),所述梯形连接块(4)另一侧面连接有第二液压杆装置(7),所述第二液压杆装置(7)下方连接有钩式抓头(8),所述梯形连接块(4)下表面固定连接有磁性装置(9)。
2.根据权利要求1所述的一种实验室用多方位机器人分拣设备,其特征在于:所述磁性装置(9)下端固定连接有长方体铁块(10),所述长方体铁块(10)中间内部设有孔槽(11),且所述孔槽(11)内固定连接有线圈(12)。
3.根据权利要求1所述的一种实验室用多方位机器人分拣设备,其特征在于:所述第一液压杆装置(5)下表面固定连接有第一撑板(13),所述第一撑板(13)两端转动连接有弯臂(14),所述弯臂(14)另一端表面固定连接有夹板(15),所述夹板(15)的夹面一侧设置有防滑层(16)。
4.根据权利要求1所述的一种实验室用多方位机器人分拣设备,其特征在于:所述第一液压杆装置(5)连接有伸缩杆(17),所述伸缩杆(17)贯穿第一撑板(13),所述伸缩杆(17)末端固定连接有第二撑板(18),所述第二撑板(18)两端转动连接有支撑柱(19),所述支撑柱(19)另一端连接有弯臂(14)。
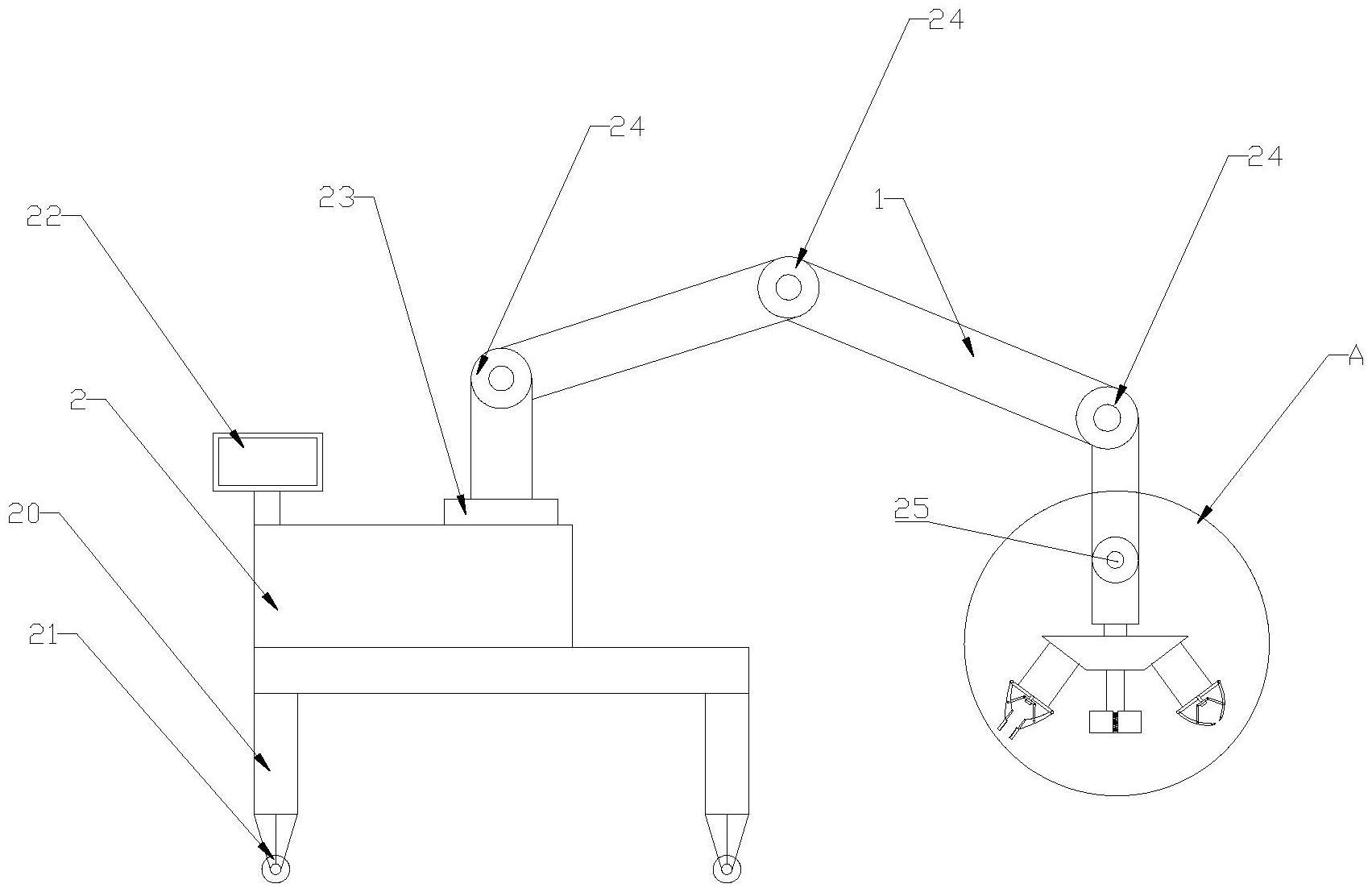
5.根据权利要求1所述的一种实验室用多方位机器人分拣设备,其特征在于:所述机器车体(2)下端设置有四个支撑腿(20),所述支撑腿(20)下方固定连接有万向轮(21),所述机器车体(2)上表面一侧设置有控制面板(22),所述机器车体(2)上表面另一侧转动连接有第二转轴(23)。
6.根据权利要求5所述的一种实验室用多方位机器人分拣设备,其特征在于:所述第二转轴(23)上表面固定连接有机械臂(1),所述机械臂(1)上设置有三个驱动轴(24),所述机械臂(1)靠近第一转轴(3)附近设置有方向轴(25)。
技术总结
本技术公开了一种实验室用多方位机器人分拣设备,包括机器臂和位于机器臂下方的机器车体,所述机器臂一端下方连接有第一转轴,所述第一转轴下表面固定连接有梯形连接块,所述梯形连接块一个侧面连接有第一液压杆装置,所述第一液压杆装置下方连接有压板式抓头,所述梯形连接块另一侧面连接有第二液压杆装置,所述第二液压杆装置下方连接有钩式抓头,所述梯形连接块下表面固定连接有磁性装置,通过多个抓头和磁性装置可以对多种实验用品进行分拣,不需要多次更换抓头,大大提高了分拣效率。
技术研发人员:赵建平
受保护的技术使用者:上海洛震实业有限公司
技术研发日:20220930
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!