一种自动化生产线分练系统
本技术属于分拣设备,具体涉及一种自动化生产线分练系统。
背景技术:
1、plc控制是目前工业上最常用的自动化控制方法,由于其控制方便,能够承受恶劣的环境,因此,在工业上优于单片机的控制。plc将传统的继电器控制技术、计算机技术和通信技术融为一体,专门为工业控制而设计,具有功能强、通用灵活、可靠性高、环境适应性强、编程简单、使用方便以及体积小、重量轻、功耗低等一系列优点,因此在工业上的应用越来越广泛。
2、现有的分拣系统虽然也有采用plc进行控制,但现有的分拣系统经常会发生识别不准确的问题,或在进行图像识别的过程中,由于识别时间过长,而导致已经过了分拣位,信号才传输到位从而造成漏分拣或者误分拣的问题。
技术实现思路
1、为了解决上述问题,本实用新型提供了一种自动化生产线分练系统,该系统通过树莓派进行图像识别,使得树莓派和pc机构建成一个自动化集成系统,配合执行模块上的传感器,使得传感器、摄像头和推杆配合构成一个完整的物料分拣系统,保证物料的精准分拣。
2、为实现上述实用新型目的,本实用新型所采用的技术方案是:一种自动化生产线分练系统,包括图像采集模块、图像识别模块、控制模块和执行模块;
3、所述图像识别模块为树莓派,所述图像识别模块通过处理来自图像采集模块的信息后,将识别后的信息传送给控制模块;
4、所述控制模块为plc,控制模块根据传输的信息信号,将控制相应执行机构完成既定动作;
5、所述执行模块接收到来自控制模块的信号后,结束待机状态,并在执行模块上的传感器被触发时执行分拣动作。
6、优选的,所述执行模块包括运输皮带,所述运输皮带的侧面设置有数个第一推动杆,每个所述第一推动杆与控制模块连接,每个所述第一推动杆上设置有第一传感器,所述第一传感器用于将物品经过时的信号传送至控制模块,每个所述第一推动杆的推出方向上对应设置一个分拣箱。
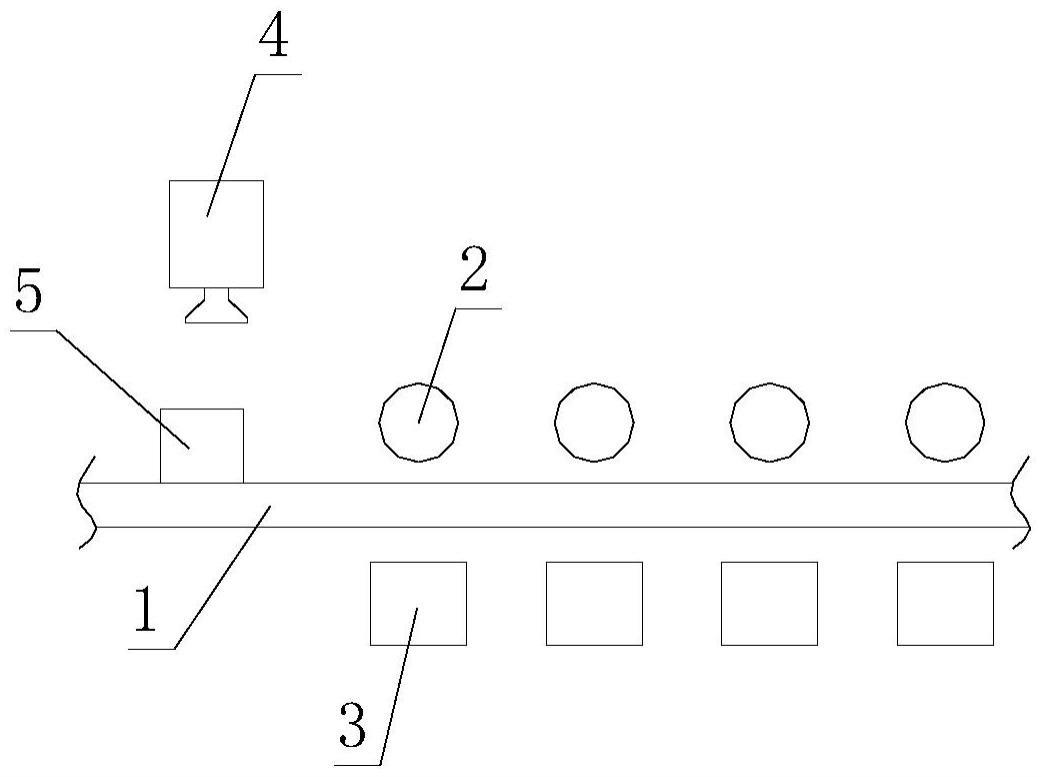
7、优选的,所述执行模块还包括下料段,所述下料段的侧面设置第二推动杆,所述第二推动杆与控制模块连接,所述第二推动杆上设置有第二传感器,所述第二传感器用于将物品经过时的信号传送至控制模块,所述第二推动杆的推出方向对应运输皮带。
8、优选的,所述运输皮带环形设置,所述第一推动杆数个为一组,两组所述第一推动杆对称设置在运输皮带的两边外侧,所述分拣箱设置在环形运输皮带的中间区域。
9、优选的,所述图像采集模块为摄像头,所述摄像头设置在第二推动杆处;
10、或,所述摄像头设置数个,分别位于第二推动杆处,以及每一个第一推动杆处。
11、优选的,所述第一传感器和第二传感器均为光电传感器。
12、本实用新型具有以下有益效果:利用plc作为主控制器,利用摄像头对物体进行识别,摄像头将识别的物料信号树莓派处理后将识别信息传输至plc,电机带动传送带,当物料移动到相应位置时,推动装置将物料推进相应的物料槽,完成分拣,以此为基础完成tiaporta的自动化生产线分练系统;本实用新型采用环形的运输皮带,和两组分拣推杆,当因为物品太多或进行图像识别而错过一组分拣推杆时,可以通过运输皮带运输至下一组分拣推杆执行分拣操作,避免漏分拣和误分拣。
技术特征:
1.一种自动化生产线分练系统,其特征在于:包括图像采集模块、图像识别模块、控制模块和执行模块;
2.根据权利要求1所述的自动化生产线分练系统,其特征在于:所述执行模块还包括下料段(7),所述下料段(7)的侧面设置第二推动杆(6),所述第二推动杆(6)与控制模块连接,所述第二推动杆(6)上设置有第二传感器,所述第二传感器用于将物品经过时的信号传送至控制模块,所述第二推动杆(6)的推出方向对应运输皮带(1)。
3.根据权利要求2所述的自动化生产线分练系统,其特征在于:所述图像采集模块为摄像头(4),所述摄像头(4)设置在第二推动杆(6)处;
4.根据权利要求3所述的自动化生产线分练系统,其特征在于:所述第一传感器和第二传感器均为光电传感器。
技术总结
本技术具体涉及一种自动化生产线分练系统,包括图像采集模块、图像识别模块、控制模块和执行模块;所述图像识别模块为树莓派,所述图像识别模块通过处理来自图像采集模块的信息后,将识别后的信息传送给控制模块;所述控制模块为PLC,控制模块根据传输的信息信号,将控制相应执行机构完成既定动作;所述执行模块接收到来自控制模块的信号后,结束待机状态,并在执行模块上的传感器被触发时执行分拣动作。目的在于通过树莓派进行图像识别,使得树莓派和PC机构建成一个自动化集成系统,配合执行模块上的传感器,使得传感器、摄像头和推杆配合构成一个完整的物料分拣系统,保证物料的精准分拣。
技术研发人员:白于涵,张雨,周朝彬,王晓川,刘辉
受保护的技术使用者:宜宾学院
技术研发日:20221109
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!