一种内驱式自同步振动机及参数确定方法
本发明涉及振动装置,尤其涉及一种内驱式自同步振动机及参数确定方法。
背景技术:
1、振动技术在实际工程中有很多的用途,其中例如工程振动破碎筛分技术作为工业中重要的技术手段,渗透到非金属矿物、化工原料、基因工程、新型药品和高级陶瓷等多个领域,其产品性能须满足这些行业的不同需求。传统破碎筛分设备的驱动装置(cn216987799 u)通常是激振器和柔性联轴节配合传动,装有待磨物料和介质的筒体在周期性转动过程中使物料受振动冲击作用,完成球磨、破碎或筛分工艺。其缺点如下:
2、1.钢材、合成橡胶、大功率电机、齿轮传动部件、轴承和磨筒等都是破磨机械设备生产制造的重要材料和关键部件,而且其柔性联轴节和偏心轴等导致设备体积过大,在面对大型化破碎粉磨筛分生产时,会加重设备的质量和投资成本。
3、2.传统的破碎筛分等设备在驱动方式上存在局限性,只能通过改变单一电机的种类增加转速。
4、3.由于振动频率与幅值的限制,会导致粉磨产品颗粒不均匀或筛分效率不高,难以满足工程需求。
5、所以,设计一种高效、结构紧凑且节能的振动设备是十分必要的。本发明提出了一种内驱式自同步振动机及参数确定方法。
技术实现思路
1、为解决现有技术存在的不足,本发明提出了一种内驱式自同步振动机及参数确定方法。
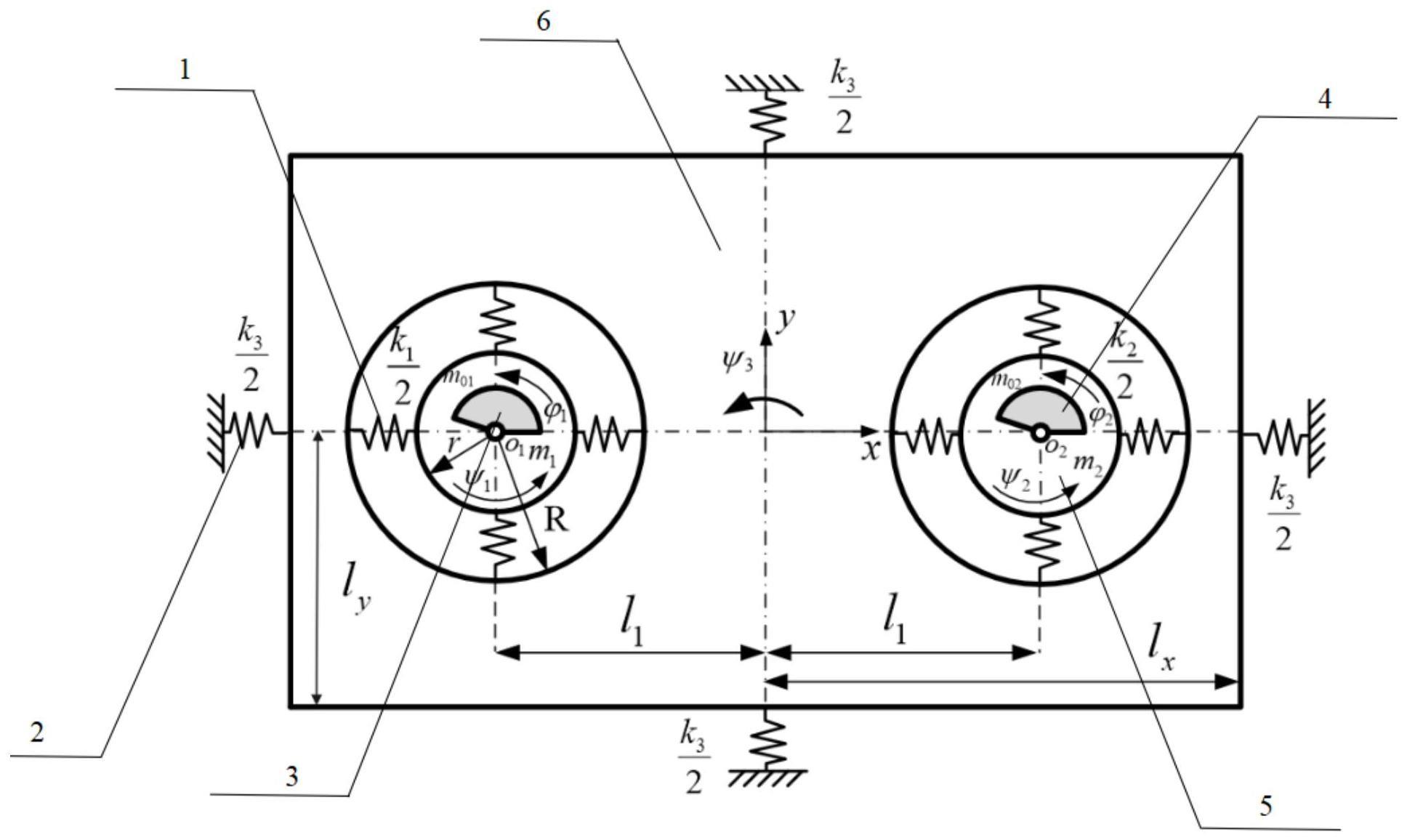
2、本发明的技术方案如下:一种内驱式自同步振动机,包括:两个激振器、三个质体和弹簧;三个质体分别是两个内质体5和一个外质体6;外质体6通过对称分布的隔振弹簧2与地基相连;每个内质体5分别通过两组主振弹簧1对称安装在外质体6内部;内质体5上分别安装一激振器,两激振器的轴心分别与所安装的内质体5质心重合,每个激振器中各有一偏心转子;所述偏心转子由感应电机驱动,分别绕着各自的旋转轴线中心旋转,两激振器旋转方向相同。
3、所述激振器的工作频率位于60rad与第一固有频率ωn1之间。
4、一种内驱式自同步振动机参数确定方法,包括如下步骤:
5、步骤1,建立动力学模型和系统运动微分方程;
6、设定固定坐标oxy,两个激振器分别为第一激振器3和第二激振器4;第一激振器3和第二激振器4的旋转中心分别为o1和o2,第一激振器3和第二激振器4对应相位分别表示为和整个内驱式自同步振动机系统有三个自由度,分为x方向的振动、y方向的振动、绕内质体和外质体各自质心的摆动ψ;
7、选定x,y,ψ,为广义坐标,基于lagrange方程,内驱式自同步振动机系统的运动微分方程推导如下:
8、
9、其中,x1、x2、x3分别为内驱式自同步振动机系统启动后,两内质体和外质体各自的质心离开其平衡位置的水平方向位移,y1、y2、y3分别为内驱式自同步振动机系统启动后,两内质体和外质体各自的质心离开其平衡位置的竖直方向位移;
10、m1=m1+m01,m2=m2+m02,m3=m3,j1=jm1+m01(r2+l12),j2=jm2+m02(r2+l12)
11、
12、
13、式中;m0i为激振器i的偏心转子质量,i=1,2;ms为质体质量,s=1,2,3;j为整个系统的转动惯量;jmd为质体的转动惯量,d=1,2,3;ji为激振器i的转动惯量,i=1,2;l1为激振器i回转轴心oi至外质体中心o的距离,i=1,2;le为系统当量回转半径;ri为激振器i的偏心距,i=1,2;g为重力加速度;fp为感应电机p的轴阻尼系数,p=1,2;tep为感应电机p的电磁输出转矩,p=1,2;kx,ky,kψ为内驱式自同步振动机系统在x,y和ψ方向上的弹簧刚度;fx,fy,fψ为内驱式自同步振动机系统在x,y和ψ方向上的阻尼系数;为时间一阶导数;为时间二阶导数;
14、步骤2,系统的位移响应分析;
15、将两激振器相位以其平均值和差值2α表示,
16、
17、式中,和
18、内驱式自同步振动机系统黏性阻尼系数的平方为0时,该系统固有频率在有阻尼和无阻尼的条件下数值相等;因此,该内驱式自同步振动机系统自由振动特征方程为:
19、
20、其中,m=diag(m1,m2,m3,m1,m2,m3,j1,j2,j3)
21、
22、ωn为系统的固有频率;安装在两个内质体激振器的偏心转子质量相同,系统的两个内质体大小质量完全相同,所连弹簧和阻尼系数也采用相同数值,设定m01=m02、m1=m2、k1=k2和kψ1=kψ2;一般在工程应用中,外质体m3与基础间的隔振弹簧刚度k3远小于内外质体间的主振弹簧刚度k1和k2,因此忽略k3和kψ3,外质体6与地基础间的隔振弹簧2刚度k3和kψ3为0,得到内驱式自同步振动机系统的固有频率为:
23、
24、当内驱式自同步振动机系统电机间维持特定相位关系稳定运转后,电机的转速为一恒定值,不考虑偏心转子角加速度i=1,2的影响,以传递函数法求解式(1)前9个方程,得到响应为:
25、
26、
27、
28、
29、
30、
31、
32、
33、
34、其中,
35、
36、
37、
38、
39、
40、
41、
42、
43、
44、
45、
46、
47、
48、
49、将公式(5)-(13)各个自由度同频率的三个响应叠加后得到:
50、
51、其中,
52、a1=r[f2 sin(α+γ2)-f1 sin(α-γ1)]
53、b1=r[f1 cos(α-γ1)+f2 cos(α+γ2)]
54、a2=r[f1 sin(α+γ1)-f2 sin(α-γ2)]
55、b2=r[f2 cos(α-γ2)+f1 cos(α+γ1)]
56、a3=r[f3 sin(α+γ3)-f3 sin(α-γ3)]
57、b3=r[f3cos(α-γ3)+f3 cos(α+γ3)]
58、a4=rl1[-f4 cos(α-γ4)+f5 cos(α+γ5)]
59、b4=rl1[-f4 sin(α-γ4)-f5 sin(α+γ5)]
60、a5=rl1[-f5 cos(α-γ5)+f4 cos(α+γ4)]
61、b5=rl1[-f5 sin(α-γ5)-f4 sin(α+γ4)]
62、a6=rl1[-f6 cos(α-γ6)+f6 cos(α+γ6)]
63、b6=rl1[-f6 sin(α-γ6)-f6 sin(α+γ6)]
64、内驱式自同步振动机系统两个内质体绕质心的摆动分别以外质体的质心为摆动中心,两个内质体质心在水平和竖直方向上的绝对运动为水平方向位移和竖直方向位移同摆动位移叠加的结果,且两个内质体绕其自身质心的摆角等于绕外质体质心的摆角,得到内驱式自同步振动机系统各质体的绝对位移响应为;
65、
66、其中,
67、
68、
69、步骤3,确定同步性和稳定性条件;
70、同步性条件;
71、当内驱式自同步振动机系统达到稳态时,两激振器的平均角速度为ωm0,对式(4)-(12)中x1,x2,x3,y1,y2,y3,ψ1,ψ2和ψ3关于时间t求一阶导和二阶导可得将上述结果代入到式(1)的最后两个表达式中,并在区间对其进行积分后,则得到两个激振器的平衡微分方程:
72、
73、式中;
74、
75、
76、
77、和为两个感应电机的有效加载力矩,在上述积分的过程中,与随时间t的变化相比,2α的变化更小,因此,2α为慢变参数,由其积分中值代替;
78、重新整理式(17),得
79、(te01-fd1ωm0)+(te02-fd2ωm0)=tload (20)
80、
81、其中,
82、
83、tdifference=(te01-fd1ωm0)-(te02-fd2ωm0)
84、tcapture=2w3tu
85、tload代表两感应电机的总加载力矩,tdifference为两感应电机的无量纲有效电磁输出力矩之差,tcapture则为内驱式自同步振动机系统的频率俘获力矩;
86、式(19)中,故两激振器同步性准则的形式为:
87、
88、式(20)是无量纲表达式,为内驱式自同步振动机系统的同步性准则,表明两个电机之间的无量纲剩余电磁输出转矩差的绝对值小于它们的无量纲余弦耦合系数;基于式(18)-(19)中关于和ωm0的非线性函数,得到系统相位差和运转频率在同步状态下的同步解分别表示为和此外,根据式(19),激振器相位差的表达式为
89、
90、此时,两激振器的同步能力系数ζ定义为频率捕获力矩与两电机的总负载转矩之比,即
91、
92、由于两电机相同,电机力矩关系(te01-fd1ωm0)-(te02-fd2ωm0)=0;此时,激振器的稳定相位差的解有两种不同的状态,即和因此,两激振器的同步能力系数的相应形式简化为:
93、
94、稳定性条件;
95、在内驱式自同步振动机振动系统中,动能t和势能v的表达式为:
96、
97、
98、哈密顿在一个周期的平均动作量定义为i,那么其表达式表示为
99、
100、在同步状态下满足稳定性准则的相位差的解称之为稳定相位差解稳定相位差值对应于哈密顿平均动作量的最小值,意味着i的二阶导数在稳定相位差解的邻域内正定,即
101、
102、式中;
103、
104、式(28)中的表达式就是两激振器的稳定性准则,且h定义为两激振器的稳定能力系数;当系统要同步稳定运行时,当h>0时,否则,
105、两激振器是相同的,由式(23)可知,h>0则应稳定在零附近,这正是实际工程中所期望的;而当h<0时,则稳定在π附近。具体为,h>0时,稳定在[-10°,10°];反之,则稳定在[170°,190°]。
106、考虑到l1的值可能会对系统的同步稳定性产生的影响,所以在同步状态下稳定性分析中讨论了不同rl(rl=l1/le)的值下系统的状态,其中,rl是激振器回转半径l1与系统等效旋转半径le的比值,rl的值越大两激振器相位差稳定在0°的比例越大。根据无量纲参数rl与质量参数rm和η之间的关系式:rm=m0/m1+m2+m3,η=m2/m1=1;0<rl<rlmax。
107、本发明的有益效果:
108、(1)工程上,采用双机同向自同步驱动,当两激振器大距离安装时,可以在更多的工作点实现机体的圆周轨迹运动;
109、(2)球磨机的工作范围在亚共振区,可以实现节能的作用;
110、(3)常规球磨机多为单机驱动,而本发明实现双机圆周轨迹驱动,球磨机的工作效率会大大提升。
- 还没有人留言评论。精彩留言会获得点赞!